


基于模糊控制的智能风力发电机机舱控制的研究
0、引言 能源危机的出现和环境保护意识的增强,使人们对新型的无污染的能源有了更加强烈的要求,而风力发电就是在这个大的趋势下逐渐进入人们的视野。从定浆距到变浆距、双馈调速控制方式的引入,无一不是为了提高风能的利用率。人们对风机进行有效控制时,不论是利用经典控制方法还是利用现代控制方法,由于它们均须进行模型的建立,而风速和风向的随机性、空气动力学的不确定性,使风机机舱模型的建立有一定的困难,而机舱的自适应追随风力和风向是增大风电机的效率和功率的前提,在这中前题下智能控制正好避开数学模型的建立,对于多变量非线性的风机的控制有很好的效果。 1、 风力发电机机舱的旋转工作原理 现在使用的风力发电机由于控制方式的不同,如双馈调速控制、失速控制等,在进行风能的扑捉时,其调整机舱的机构有着区别,但是其原理是一样的,大家都通过风速仪和风向标把得到的信息从机舱顶部传到风机底部的CPU板上,通过模数量的转化,把数字量输入到中央处理单元,让中央处理单元分析和处理是否进行调整偏航马达的运行,利用动力机构(最常用的液压机构)调整发电机机舱的姿态,使风轮叶片始终朝着迎风的方向,以保证风力发电机在运行时能够充分利用已有的风力资源;或者当风速超过额定的最大风速时,进行偏航刹车马达的运行、或者直接进行90�偏航,以保证风力发电机能够正常安全的运行;而当风速太小时,为了防止风力发电机发出的电,不如他的转子励磁从电网上吸收的电能,也要进行脱离电网的处理,已节约电网上的电力资源。这种方法需要把风力资源的信息风向和风速反馈到风力发电机的底部信息处理主板上,增加了发电机中央处理单元的负荷,延缓了机舱的旋转时间,出于上述的考虑,我们设计了基于模糊控制的智能风力发电机机舱的设计,让机舱的风能扑捉的机构直接成为风力发电机系统的智能终端,减小系统中央处理单元的负荷。
2、 智能机舱硬件系统的设计 智能机舱硬件原理图如下图1所示:
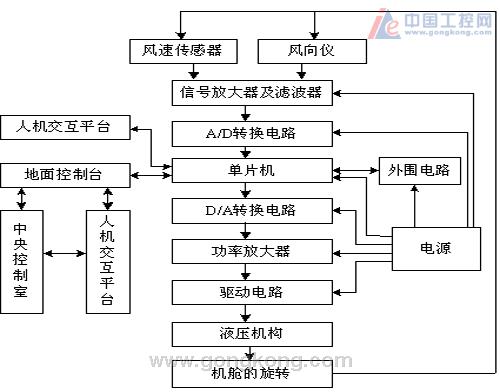
由上可知以往的风力发电机是把所采集到的风能的信息交给地面控制台,而本设计使机舱有一定的主动性。其原理是当风速传感器和风向仪采集到风力资源的信息,放大并进行模数转换该信息后,进入到单片机利用模糊控制算法进行智能处理,把得到的结果通过后向通道,驱动液压电机,是机舱旋转至迎风的方向。如果风速和风向稍有变动,则风速传感器和风向标重新进行采集信息,使风力发电机实时的得到控制,充分利用风能。当然如果要进行人为的操作,如检修、维护风力发电机时,可通过中央控制室的人机交互平台发送停机信号之机舱。如果风速小于或者大于额定风速时,单片机发送偏离迎风方向的命令,以防止风力发电机在大风时的破毁和对电网的冲击。 系统主机采用单片机模糊控制器80C552,这是由于出于对系统软件要用模糊控制算法的考虑,因为该单片机将模糊逻辑控制理论和单片机技术结合起来,能够起到简化软件的开发;其次80C552内部有8路10位A/D转换器,简化了电路,并且在80C552内部有一个WATCHDOG保护电路,使该系统在现场运行时防止程序飞奔,提高系统的稳定性,由于该单片机内部仅有256byte的RAM且无ROM,因此必须对其进行系统扩展。 系统的输出可分为两部分:第一部分由80C552的一个并行口输出给LED数码管,显示当前的风速;第二部分由另一个并口输出给功率放大器,以驱动液压电机。当传感器检测到风速和风向信号的时候,单片机发出驱动信号,由于从单片机出来的信号比较小,只有通过放大电路,才能驱动各种也要电机使机舱达到迎风或者背风的状态。 在与风力发电机底部和中央控制式的通信时,因为80C552有着一个全双工异步的串行通信口SIO0,和一个I 2C传行总线口SIO2,只要把从单片机的COMS信号换成表准的RS-232信号就可以进行串行通信,不仅仅可以与风力发电机底部主板有着可靠的通信,而且还可以与中央控制室直接进行通信,以便当检修风力发电机时或风力发电机机舱出现毛病时,人们可以可靠的停止风力发电机,到舱顶进行维修。 3、 智能机舱系统软件的实现 由于空气动力学的随机、不确定性,很建立一个确定的关于风力和风向的数学关系式,为了达到最佳的控制效果,我们采用了模糊控制算法。其系统控制原理图如下:
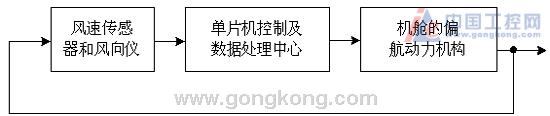
当风速或风向低于(或高于)或偏离设定值Vmin(或Vmax)时,风力发电机进行自动停机并使风力机在脱离电网状态(甚至旋转机舱在背风的方向)。当传感器检测到的信息在设定值之间时,微机系统将本次所得到的风速与风向的信息与上次所得到的信进行比较,得出风速和风向的误差值,并设定论域为: X=[-4,-3,-2,-1,0,1,2,3,4 ] Y=[-4,-3,-2,-1,0,1,2,3,4 ] 其中风速偏差e的论域为X,风向偏差变化q的论域为Y。这两个语言变量模糊化后分别用E和Q表示,控制器的输出为u,模糊后用U表示。将e和q的在[-4,4]之间分为5当:{NB(负大),NS(负小),ZE(零),PS(正小),(PB正大)},U的论域也为[-4,-3,-2,-1,0,1,2,3,4]。 由于该系统的输入是两个变量的,故模糊算法的控制语言采用如下: IF E AND Q THEN U 其中E代表风速,Q代表风向,可得到控制表(略)。 如果检测到的信息不是上述的定点,取三角形函数为隶属度函数、利用单值隶属度法进行数值的模糊化。在数值的反模糊化时,利用重心算法得出控制量进行机舱的旋转,以最大程度的扑捉风力资源。 对上述模糊语句进行MATLAB仿真得到信号响应曲线如下:

由上面的系统响应曲线图可知,虽然本设计有着超调量,但其比例不是很大,且能够在较短的时间里使系统达到较稳定的输出。由于机舱在高空中旋转,如果响应太快的话对机舱本身来说也不是一件太好的事,那样会使机舱本身不稳定的,因此在系统控制机舱旋转时,这个反应时间因该说是较快的控制反应时间,所以从上面的分析来看,本设计有着较好的总体性能。 4、 结论与展望 该系统得中央处理单片机通过调整系数并结合控制表,不仅仅减轻了风机底座中央处理单元的的负荷,而且对风力发电机的机舱做了实时的控制,以保证风力发电机充分的利用风力资源,这对能源的危机已一定的改善作用。 参考文献: [1]张吉礼. 模糊-神经网络控制原理于工程应用[M]. 哈尔滨工业大学出版社, 2004(6) [2]章卫国,杨向忠.模糊控制理论与应用[M].西北工业大学出版社,2000(10) [3]宫靖远.风电厂工程技术手册[M].机械工业出版社,2004(3) [4]王承煦,张源.风力发电[M].中国电力出版社,2003(3) [5]佟继红,王继忠. 单片机锅炉自适应控制系统研究[J]. 北华大学学报(自然科学版),2005(6),-278-280




 投诉建议
投诉建议
提交

超越传统直觉,MATLAB/Simulink助力重型机械的智能化转型

新大陆自动识别精彩亮相2024华南国际工业博览会

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会