


基于DMC-PID串级主汽温控制系统的仿真研究
摘 要:针对火电厂主汽温被控对象的大迟延、大惯性且模型不确定的特点,设计了基于预测—PID串级控制的主汽温控制系统。该系统将串级控制结构与预测控制算法相结合,内回路采用常规比例调节器,外回路采用动态矩阵控制器(DMC)。既保持了预测控制的强鲁棒性和跟踪性能,又具有足够的抗干扰性。仿真结果表明,所设计的系统在控制品质、鲁棒性方面明显优于常规PID控制系统。
关键词:主汽温系统 串级控制 动态矩阵控制 PID控制
1 引言
众所周知,大迟延、大惯性的对象是难控对象,纯迟延的存在使系统稳定性和控制品质明显下降,在模型摄动的情况下,情况会更严重。采用固定参数的PID控制,难以在稳定性和控制品质之间取得折衷,即使整定出一组相对理想的参数,在对象模型变化时,被控品质也难以保证证。Smith预估控制也存在同样的问题,只有在模型精确稳定时,才能完全补偿纯迟延。
火电厂锅炉主汽温控制对象就是这种大迟延、大惯性的对策,而且受控系统存在严重的非线性和时变特性,且影响汽温变化的扰动因素很多。如蒸汽负荷、烟气温度和流速、火焰中心位置、减温水量、给水温度等等,对这样的对象,用常规控制方式难以取得满意的控制效果,严重时还会影响机组的安全、经济运行。因此有必要探讨主汽温控制的新策略。
2 控制系统设计
动态矩阵控制(DMC)是预测控制算法中一种重要的算法,它能直接处理带有纯滞后、大惯性的对象,有良好的跟踪性能,并对模型失配有较强的鲁棒性。然而,由于模型的卷积性质,使其难以采用PID控制那样短的采样周期,因而对过程中随机突发性干扰的抑制往往不如PID控制有效。此外,由于采用单层次的控制结构,反馈环节难以兼顾鲁棒性和抗干扰性。为了使预测控制系统能满足综合的性能要求并简化设计,?有必要改变原有算法的单层次结构,而采用多层控制的策略。在本文中,把串级控制结构引入预测控制,在内环采用频率较高的常规PID控制,抑制进入系统的主要干扰,而外环采用DMC控制,获得了良好的跟踪性和鲁棒性。
根据上述分层控制的思想,串级控制副回路的选择应该使副对象含有系统的主要干扰,同时在副回路采用较高采样控制频率,其参数的选择原则同传统的PID调节器。而主回路则以副回路和对象的剩余部分一起作为广义对象,由于干扰的主要成分已经得到有效的抑制,可以选择较大的采样周期,采用DMC控制。基于上述思想设计的主汽温预测—PID控制系统如图1所示。其中G1(s),G2(s)分别为惰性区和导前区的传递函数,θ1(k),θ2(k)分别为主汽温和导前汽温,w(k)为主汽温的参考值,N(k)为扰动量。

3 动态矩阵控制算法
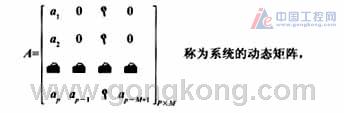
动态矩阵控制是一种利用被控对象的单位阶跃响应采样数据作为预测模型的预测控制算法,设被控对象的单位阶跃采样数据为{a1,a2,}。对于渐近稳定的系统,其阶跃响应在若干个采样周期后就趋于稳态值,即aN≈a(∞),因此可以用单位阶阶跃响应采样数据的前有限项描述系统的动态特性{a1,a2,aN}。
由线性系统的叠加原理,可以得到系统输出的预测模型为:


上式表明,预测模型输出由待求的未知控制量和过去控制量产生的系统已知输出初值两部分组成。
由于模型和干扰等影响,系统的输出预测值,需要在预测模型输出的基础上用实际输出误差修正,即

优化下列性能指标:
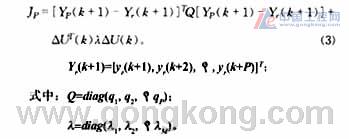
P是预测时域,M是控制时域。Q,λ分别为误差权矩阵和控制权矩阵。

4 设计参数的选择
预测控制算法由于采用了多步预测、滚动优化和反馈校正等控制策略,扩大了反映系统动态行为的有用信息,提高了系统运行的稳定性和鲁棒性。但同时,也增加了优化时域P和控制时域M。并且使得预测校正误差权系数Q、控制权系数λ以及P和M等参数都隐含在控制参数中,不易直接考察它们的取值对控制性能的影响。只能采用试凑和仿真研究来初步选定。通过仿真总结了下面几点调整规律:
(1)为了使滚动优化真正有意义,应使优化时域P包括对象的真实动态部分。
(2)控制时域M越小,跟踪性能越差,M增大,系统的稳定性和鲁棒性随之下降,另外,当M增大时,矩阵A的维数增加,计算量增大,使系统的实时性降低,因此,M的选择要兼顾快速性和稳定性。
(3)误差权系数Q的简单选取方法是与P的选取相对应的,对应时滞和反向部分qi=0,而其它部分则取qi=1。
(4)控制权系数λ的作用是用来限制控制增量的剧烈变化,以减少被控对象的过大冲击。通过增大λj可以实现稳定控制,但同时也减弱了控制作用。一般应先将λj取得较小,此时若系统稳定但控制量较大,则可适当增加λj,直到取得满意的控制效果。
5 系统仿真研究
以某厂300MW机组主汽温为被控对象,在图1中:

对上述对象设计了常规PID串级控制系统和DMC-PID串级控制系统。前者副调采用P调节器,主调采用PI调节器,用衰减曲线法整定PID参数得:副调:δ1=2.7;主调δ1=4.1,Ti=95s。后者副调也为P调节器,比例带同上,主调为DMC控制器。取采样周期为5s,对两个系统在不同工况下进行单位阶跃定值扰动仿真。
图2是两个系统在给定值扰动下的单位阶跃响应曲线。从图中可以看出,DMC-PID串级控制系统过渡过程时间较短,响应速度快,没有超调,控制品质明显优于常规PID串级控制系统。
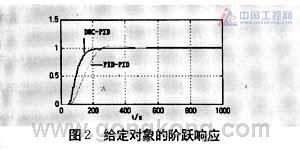
图3为惰性区惯性时间常数由90s变为110s时,两系统单位阶跃定值扰动响应曲线。由图看出,常规PID串级控制系统超调明显变大,过渡过程时间延长较大,而DMC-PID串级控制系统的控制品质好得多。
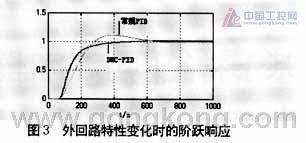
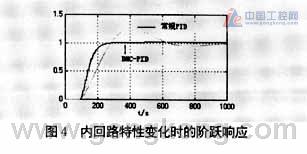
图4是对象导前区传递函数的延迟时间由35s变为100s时,两个系统的定值扰动响应曲线。由图看出,常规PID串级控制系统的超调大大增加,过渡过程时间大大延长,而DMC-PID串级控制系统基本没有超调,相比过渡过程时间短得多,响应速度快得多,控制品质明显优于前者。
6 结论
通过仿真比较,本文设计的主汽温预测—PID串级控制系统的控制品质和鲁棒性明显优于常规PID控制系统,而且设计方法简单易行,微机编程方便,适于实时控制的特点,便于在工程中应用,为大迟延、大惯性系统的控制提供了一种新方法。
参考文献
[1]舒迪前.预测控制系统及其应用[M].机械工业出版社,1996
[2]Culter C.R.,Ramaker B.L.Dynamics Matrix Control_A Computer Control Algorithm[C].Proc.JACC.San Francisco,1980
[3]席裕庚.预测控制[M].北京:国防工业出版社,1993
[4]陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].机械工业出版社,1998
[5]王东风,李遵基,宋之平.基于参数自整定的再热汽温解耦预测控制[J].华北电力大学学报,2001,(4):34-39




 投诉建议
投诉建议
提交

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机