


三种常用的恒压供水PID控制器形式探讨
2008/5/23 13:51:00
1 引言
在大多数的恒压供水电气系统的设计中,PID控制算法是设计人员常常采用的恒压控制算法。常见的PID控制器控制形式主要有3种:(1)硬件型,通用PID温控器;(2)软件型,使用离散形式的PID控制算法在可编程序控制器上做PID控制器;(3)使用变频器内置PID控制功能,相对前两者来说,这种叫内置型。这3种控制器形式各具特点,但采用什么形式的PID控制器对控制性能和生产成本具有一定的影响,这值得设计人员考虑的。本文将与大家探讨3种控制器形式的应用、优劣以及调试过程中的要点。
2 PID温控器
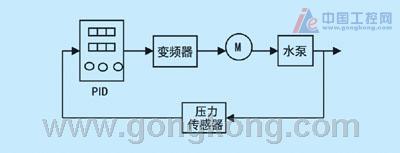
图1 PID温控器控制系统框图
现在的PID温控器多为数字型控制器,具有位控方式、数字PID控制方式以及模糊控制方式,有的还具有自整定功能,如富士PWX系列温控器、欧陆800系列温控器就属此类型。此类温控器的输入输出类型都可通过设置参数来改变,考虑到抗干扰性,一般将输入输出类型都设定为4~20mA电流类型。图1为以PID温控器调节器构成的闭环压力调节系统,压力的给定值由PID温控器的面板设定,压力传感器将实际的压力变换为4~20mA的压力反馈信号,并送入PID温控器的输入端;PID温控器将输入的模拟电流信号经数字滤波、A/D转换后变为数字信号,一方面作为实际压力值显示在面板上,另一方面与给定值作差值运算;偏差值经数字PID运算器运算后输出一个数字结果,其结果又经D/A转换后,在PID温控器的输出端输出4~20mA的电流信号去调节变频器的频率,变频器再驱动水泵电机,使压力上升。当给定值大于实际压力值时,PID温控器输出最大值20mA,压力迅速上升,当给定值刚小于实际压力值时,PID温控器输出开始退出饱和状态,输出值减小,压力超调后也逐渐下降,最后压力稳定在设定值处,变频器频率也稳定在某个频率附近。
这种PID控制形式的主要优点有:操作简单、功能强大、动态调节性能好,适用于选用的变频器性能不是很高的应用场合,同时控制器还具有传感器断线和故障自动检测功能。缺点是:PID调节过于频繁,稳态性能稍差,布线工作量多。调试注意要点:P参数值不宜太大,一般为0.5~1;I参数和D参数的比值大约为4,I参数的值一般为6s~16s;由于PID温控器的响应快,为了防止调整过程中压力波动过大,变频器的上升和下降时间应调大些,推荐30s~80s;设定PID温控器的显示标尺斜率,校正压力显示值;设定适当的数字滤波时间,抑制干扰信号的输入。
3 软件型PID
喜欢使用PLC指令编程的设计者通常自己动手编写PID算法程序,这样可以充分利用PLC的功能。在连续控制系统中,模拟PID的控制规律形式为

(1)
式中 e(t)—偏差输入函数;
u(t)—调节器输出函数;
KP—比例系数;
T1—积分时间常数;
TD—微分时间常数。
由于式(1)为模拟量表达式,而PLC程序只能处理离散数字量,为此,必须将连续形式的微分方程化成离散形式的差分方程。式(1)经离散化后的差分方程为

(2)
式中 T—采样周期;
k—采样序号,k=0,1,2… i,… k;
u(k)—采样时刻k时的输出值;
e(k)—采样时刻k时的偏差值;
e(k-1)—采样时刻k-1时的偏差值;
为了减小计算量和节省内存开销,将式(2)化为递推关系式形式:

(3)
式中 SV—调节器设定值;
f(k)—采样时刻k时的反馈值;
f(k-1)—采样时刻k-1时的反馈值;
f(k-2)—采样时刻k-2时的反馈值;
至此式(3)已可以用作编程算法使用了,如图2所示,建议采用1s的时间定时中断程序来做PID程序。式(3)中的常数项可在参数输入后调用一个子程序来计算,这样可以避免每个扫描周期都计算一次常数项。
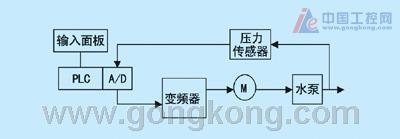
图2 软件型PID控制系统框图
可采用与PLC直接连接的文本显示器或触摸面板输入参数和显示参数,如西门子的TD200、TP7等。
使用式(3)编写PID程序,需4次乘法、两次加法、两次减法计算以及多个MOV指令,因此显得很烦琐。实际应用中,取消P、D控制,保留I控制,也能很好满足实际要求,所以控制关系式可写成:
u(k)=u(k-1)+△u (4)
式中 △u—积分增量。
显然式(4)简单得多,积分增量可根据实际需要来确定。当压力未到达设定值,增量为正;当压力超调后,增量为负。采用式(4)来控制压力,也存在一些问题,△u设置过大,则稳态时压力误差大,△u设置太小,则调整时间太长。如果结合模糊控制的思想,就能较好地改良控制性能。控制思想如下:当实际压力小于设定值的90%时,PLC输出最大值信号,使变频器以50Hz运行,从而压力迅速上升;当实际压力等于或大于设定值的90%时,PLC输出一个经验值,然后才调用增量控制中断程序。经验值可事先设定,等压力稳定后,再将稳定后的控制输出值替换原预设经验值。
这种形式的PID控制器优点是控制性能好,柔性好,在调节结束后,压力十分稳定,信号受干扰小,调试简单,接线工作量少,可靠性高。不足是编程工作量增加,需增加硬件成本。调试时要尽量设置短的变频器的上升时间和下降时间。在编程设计中必须防止计算结果值溢出,造成控制失控,而且还要编写校正传感器零点和判断其是否正常的功能程序。
4 变频器内置PID
现在的大多数变频器,无论是水泵风机专用型,还是通用型都内置了PID控制功能,这对节省系统的成本很有利。使用变频器的内置PID功能,首先必须设定PID功能有效,然后确定PID控制器的信号输入类型,如采用有反馈信号输入,则要求有设定值信号,设定值可以为外部信号,也可以是面板设定值;如采用偏差输入信号,则无须输入设定值信号。以下是以三菱F540系列变频器为例的2种输入信号接线控制图, 如图3、图4所示。图中:R1—设定值电位器,R2—电阻式远传压力表,RT与SD短接PID功能有效。
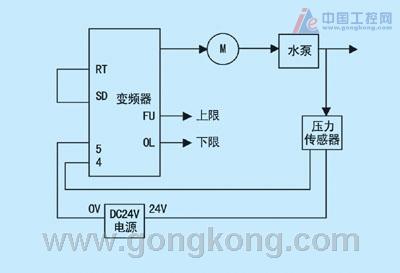
图3 设定值为面板输入,反馈信号
为电流信号的内置PID接线图

图4 输入为偏差值的内置PID接线图
内置型PID的优点很明显,成本低,控制性能较好,设置的参数少,接线工作量较少,抗干扰性最好。缺点是这种PID也属软件型PID,响应较慢,易出现超调现象;压力的设置和显示不直观。调试应尽量设置短的变频器的上升时间和下降时间,使用面板设定设置值时,设定的是设置值与传感器量程的相对值,设置正确的PID动作方向。
5 结束语
当然实际应用还有其他形式的控制器,只不过这3种形式的PID控制器较常用而已。在结束文章之前,我想小结一下设计者应如何选择哪种形式的PID控制器。对于初入门的设计者来说,采用第1种形式较佳,因为PID温控器操作方便、简单易懂,通过实时调整,了解PID参数的作用,较快的掌握PID控制的原理。对于有经验的设计者来说,采用第2种形式最好,因为利用PLC的指令可以编出功能强大的控制器并能优化PLC控制程序。对于考虑成本的设计者来说, 采用第3种形式的图4应用方案最佳,既充分利用了变频器的功能,又节省了高成本的压力传感器,而且控制效果也不错,不失为一种好方案。文中有不当之处,敬请同行批评指正!
参考文献
[1] 黄一夫. 微型计算机控制技术[M]. 北京:机械工业出版社,1996.
[2] 现代调节器及其应用[M]. 燕山大学出版社,1998.
[3] 三菱FR-F540使用手册。
作者简介
李继波(1975-) 男 1997年毕业于河北燕山大学电气工程学院工业电气自动化专业,主要从事烟机电气控制系统维护和工业自动生产线设计。
在大多数的恒压供水电气系统的设计中,PID控制算法是设计人员常常采用的恒压控制算法。常见的PID控制器控制形式主要有3种:(1)硬件型,通用PID温控器;(2)软件型,使用离散形式的PID控制算法在可编程序控制器上做PID控制器;(3)使用变频器内置PID控制功能,相对前两者来说,这种叫内置型。这3种控制器形式各具特点,但采用什么形式的PID控制器对控制性能和生产成本具有一定的影响,这值得设计人员考虑的。本文将与大家探讨3种控制器形式的应用、优劣以及调试过程中的要点。
2 PID温控器
图1 PID温控器控制系统框图
现在的PID温控器多为数字型控制器,具有位控方式、数字PID控制方式以及模糊控制方式,有的还具有自整定功能,如富士PWX系列温控器、欧陆800系列温控器就属此类型。此类温控器的输入输出类型都可通过设置参数来改变,考虑到抗干扰性,一般将输入输出类型都设定为4~20mA电流类型。图1为以PID温控器调节器构成的闭环压力调节系统,压力的给定值由PID温控器的面板设定,压力传感器将实际的压力变换为4~20mA的压力反馈信号,并送入PID温控器的输入端;PID温控器将输入的模拟电流信号经数字滤波、A/D转换后变为数字信号,一方面作为实际压力值显示在面板上,另一方面与给定值作差值运算;偏差值经数字PID运算器运算后输出一个数字结果,其结果又经D/A转换后,在PID温控器的输出端输出4~20mA的电流信号去调节变频器的频率,变频器再驱动水泵电机,使压力上升。当给定值大于实际压力值时,PID温控器输出最大值20mA,压力迅速上升,当给定值刚小于实际压力值时,PID温控器输出开始退出饱和状态,输出值减小,压力超调后也逐渐下降,最后压力稳定在设定值处,变频器频率也稳定在某个频率附近。
这种PID控制形式的主要优点有:操作简单、功能强大、动态调节性能好,适用于选用的变频器性能不是很高的应用场合,同时控制器还具有传感器断线和故障自动检测功能。缺点是:PID调节过于频繁,稳态性能稍差,布线工作量多。调试注意要点:P参数值不宜太大,一般为0.5~1;I参数和D参数的比值大约为4,I参数的值一般为6s~16s;由于PID温控器的响应快,为了防止调整过程中压力波动过大,变频器的上升和下降时间应调大些,推荐30s~80s;设定PID温控器的显示标尺斜率,校正压力显示值;设定适当的数字滤波时间,抑制干扰信号的输入。
3 软件型PID
喜欢使用PLC指令编程的设计者通常自己动手编写PID算法程序,这样可以充分利用PLC的功能。在连续控制系统中,模拟PID的控制规律形式为
(1)
式中 e(t)—偏差输入函数;
u(t)—调节器输出函数;
KP—比例系数;
T1—积分时间常数;
TD—微分时间常数。
由于式(1)为模拟量表达式,而PLC程序只能处理离散数字量,为此,必须将连续形式的微分方程化成离散形式的差分方程。式(1)经离散化后的差分方程为
(2)
式中 T—采样周期;
k—采样序号,k=0,1,2… i,… k;
u(k)—采样时刻k时的输出值;
e(k)—采样时刻k时的偏差值;
e(k-1)—采样时刻k-1时的偏差值;
为了减小计算量和节省内存开销,将式(2)化为递推关系式形式:
(3)
式中 SV—调节器设定值;
f(k)—采样时刻k时的反馈值;
f(k-1)—采样时刻k-1时的反馈值;
f(k-2)—采样时刻k-2时的反馈值;
至此式(3)已可以用作编程算法使用了,如图2所示,建议采用1s的时间定时中断程序来做PID程序。式(3)中的常数项可在参数输入后调用一个子程序来计算,这样可以避免每个扫描周期都计算一次常数项。
图2 软件型PID控制系统框图
可采用与PLC直接连接的文本显示器或触摸面板输入参数和显示参数,如西门子的TD200、TP7等。
使用式(3)编写PID程序,需4次乘法、两次加法、两次减法计算以及多个MOV指令,因此显得很烦琐。实际应用中,取消P、D控制,保留I控制,也能很好满足实际要求,所以控制关系式可写成:
u(k)=u(k-1)+△u (4)
式中 △u—积分增量。
显然式(4)简单得多,积分增量可根据实际需要来确定。当压力未到达设定值,增量为正;当压力超调后,增量为负。采用式(4)来控制压力,也存在一些问题,△u设置过大,则稳态时压力误差大,△u设置太小,则调整时间太长。如果结合模糊控制的思想,就能较好地改良控制性能。控制思想如下:当实际压力小于设定值的90%时,PLC输出最大值信号,使变频器以50Hz运行,从而压力迅速上升;当实际压力等于或大于设定值的90%时,PLC输出一个经验值,然后才调用增量控制中断程序。经验值可事先设定,等压力稳定后,再将稳定后的控制输出值替换原预设经验值。
这种形式的PID控制器优点是控制性能好,柔性好,在调节结束后,压力十分稳定,信号受干扰小,调试简单,接线工作量少,可靠性高。不足是编程工作量增加,需增加硬件成本。调试时要尽量设置短的变频器的上升时间和下降时间。在编程设计中必须防止计算结果值溢出,造成控制失控,而且还要编写校正传感器零点和判断其是否正常的功能程序。
4 变频器内置PID
现在的大多数变频器,无论是水泵风机专用型,还是通用型都内置了PID控制功能,这对节省系统的成本很有利。使用变频器的内置PID功能,首先必须设定PID功能有效,然后确定PID控制器的信号输入类型,如采用有反馈信号输入,则要求有设定值信号,设定值可以为外部信号,也可以是面板设定值;如采用偏差输入信号,则无须输入设定值信号。以下是以三菱F540系列变频器为例的2种输入信号接线控制图, 如图3、图4所示。图中:R1—设定值电位器,R2—电阻式远传压力表,RT与SD短接PID功能有效。
图3 设定值为面板输入,反馈信号
为电流信号的内置PID接线图
图4 输入为偏差值的内置PID接线图
内置型PID的优点很明显,成本低,控制性能较好,设置的参数少,接线工作量较少,抗干扰性最好。缺点是这种PID也属软件型PID,响应较慢,易出现超调现象;压力的设置和显示不直观。调试应尽量设置短的变频器的上升时间和下降时间,使用面板设定设置值时,设定的是设置值与传感器量程的相对值,设置正确的PID动作方向。
5 结束语
当然实际应用还有其他形式的控制器,只不过这3种形式的PID控制器较常用而已。在结束文章之前,我想小结一下设计者应如何选择哪种形式的PID控制器。对于初入门的设计者来说,采用第1种形式较佳,因为PID温控器操作方便、简单易懂,通过实时调整,了解PID参数的作用,较快的掌握PID控制的原理。对于有经验的设计者来说,采用第2种形式最好,因为利用PLC的指令可以编出功能强大的控制器并能优化PLC控制程序。对于考虑成本的设计者来说, 采用第3种形式的图4应用方案最佳,既充分利用了变频器的功能,又节省了高成本的压力传感器,而且控制效果也不错,不失为一种好方案。文中有不当之处,敬请同行批评指正!
参考文献
[1] 黄一夫. 微型计算机控制技术[M]. 北京:机械工业出版社,1996.
[2] 现代调节器及其应用[M]. 燕山大学出版社,1998.
[3] 三菱FR-F540使用手册。
作者简介
李继波(1975-) 男 1997年毕业于河北燕山大学电气工程学院工业电气自动化专业,主要从事烟机电气控制系统维护和工业自动生产线设计。




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机