


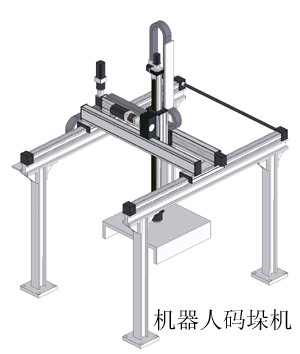
上海众拓三坐标壁挂机器人对液晶显示器的检测
一、工作要求:
1、采用视觉系统对液晶显示器进行检测。
2、检测范围:
X , Y , Z 轴的有效行程分别为2500mm ,600mm 和 400mm 。在 Z 轴下端装配 可旋转视觉像机。相机可旋转。
3、 工件形状:
工件为电脑液晶显示器,该显示器有大有小,工作台每次安装10个显示器,以备检测。
4、 定位位精度及分辨率:
重复定位度为±0.025mm,系统分辨率0.01 mm
5、控制系统:
系统要求能够对检测数据要进行分析处理,包括显示出探伤扫描图像、滤波、增强、放大、旋转、特征提取、将扫描结果打印或上传给上位机、位置标记 等。
二、机器人组成:
该机器人由安装架及显示器工作台、机器人定位系统、伺服驱动系统、末端检测设备(相机)、控制系统等组成。
2、机器人定位系统
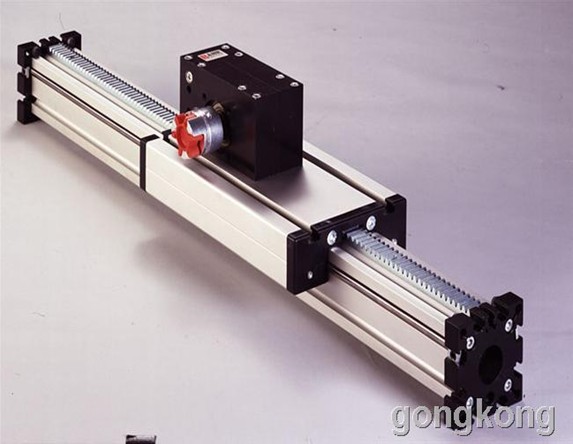
上海众拓机器人定位系统是整台设备的核心,为德国bahr公司产品, X,Y,Z三坐标均选择为高精密滚珠丝杠传动,单坐标重复定位精度为0.025mm。
X轴选用DLK200定位单元,由一台1000W伺服电机驱动。伺服电机与滚珠丝杠直接连接。
Y轴选用DLK160定位系统单元,由于结构要求,Y 轴是该运动结构的最末端。伺服电机与滚珠丝杠直接连接。
Z轴选用DLK160定位系统单元,Z轴的下端安装电机,上端安装Y轴,其滑块与X轴滑块。伺服电机与滚珠丝杠直接连接。
一台微型伺服电机带动一台精密行星减速机,行星减速机输出端安装视觉系统,形成旋转轴。所有这些元件均安装Y轴的滑块上。
3、伺服驱动系统
选用具有通用功能的伺服电机。每个运动轴配有一台伺服电机及一台减速机,四个运动轴,共四套伺服电机和四台减速机,其中垂直运动轴为带抱闸伺服电机。
4、视觉系统
该部分由光源、镜头等组成。功能是时时将图像传输给控制中心。
5、控制系统
控制系统由大型PLC、触摸屏组成。
6、安全防护装置
该机具有故障提示及报警功能,并且每次出现故障时都能准确的反映出故障具体位置,便于迅速排除故障,主要包括:机器人碰撞保护功能;工件安装到位检测;光幕安全保护,所有的技术开发都是由上海众拓机器人技术有限公司完成





 投诉建议
投诉建议
提交
德国BAHR 齿轮齿条定位系统

德国BAHR 防爆定位系统

德国BAHR 同步带定位系统

上海众拓 机床上下料机器人
上海众拓 码垛机器人