


Exlar电动缸在伺服焊钳的应用
Exlar电动缸在伺服焊钳的应用
如果您的焊枪的定位轴是用气缸或滚珠丝杠驱动,采用Exlar 伺服电动缸可大幅提升焊接质量。
Exlar 的伺服电动缸采用先进的滚柱丝杠(RollerScrew)传动技术,可实现对焊枪电极力和电极位置的精确控制,在不使用压力传感器的开环系统中,能实现对电极力极高的控制精度和重复度。与气缸或采用滚珠丝杠(Ball Screw)传动的“传统”伺服电动缸相比,采用一体化设计、内置伺服电机的Exlar电动缸结构更紧凑、重量更轻,大幅提高电极控制精度和焊接质量。
Exlar 伺服电动缸全面提高焊接的质量和效率
与以往焊枪中的采用的气缸或体积笨重的“传统”电动缸相比,Exlar 伺服电动缸电动缸的体积最小、重量最轻,控制简单、定位精确。更重要的是,采用伺服控制技术的Exlar 电动缸可对电极的位置和速度进行快速、方便的控制,无需对任何开关或偏置量进行设置,控制方法非常简单:在操作面板中输入新的设定值或让机器人控制系统发送指令即可。
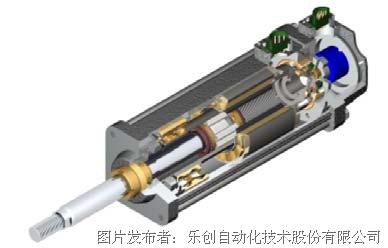
采用独特的反向行星滚柱丝杠(Inverted RollerScrew)传动技术(Exlar 拥有技术专利)的GSX 系列电动缸,采用一体化技术设计,具有速度快、推力大、低维护、长寿命、体积小等特点。
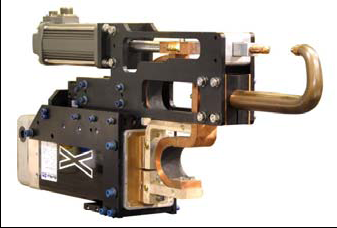
采用Exlar 伺服电动缸的焊枪(C 型)

采用Exlar 伺服电动缸的焊枪(X 型)
Exlar 伺服电动缸的压力重复精度
Exlar的GSX系列电动缸具有业界最高标准的力重复控制精度。GSX系列电动缸采用一体化设计技
术,内置伺服电机转子磁体与行星滚柱丝杆机构融为一体,消除了同步带、齿轮、联轴器等中间传动环节带来的效率损失和传动误差。Exlar的GSX系列电动缸的内置伺服电机采用先进的T‐Lam定子分段叠片技术,散热效率高,扭矩密度大,齿槽效应低,扭矩重复性好,压力重复度
高。
以下图表是采用开环控制方式(无力传感器)对GSX40 电动缸进行压力重复精度测试的结果。

GSX40 电动缸由标准工业机器人的第7 轴控制器和伺服驱动器控制,以每分钟20 次的循环速度,重复20000 次测试。测试数据表明,GSX 系列电动缸的压力重复精度为+/‐ 1.5%,大大优于竞争产品的测试数据。
?? 焊接机器人第7 轴控制
?? 供电电源电压460 VAC
?? 循环测试20000 次,历经17 小时
?? 伺服驱动器输出电流值2.55 A
?? 设定压力: 1415 lbf
?? 最大实测压力: 1436 lbf
?? 最小实测压力: 1399 lbf
?? 压力重复精度 +/‐ 1.5%
Exlar 电动缸应用于伺服焊枪的性能优势
— 行星滚柱丝杠(Roller Screw)传动技术
?? 几百万次焊接工作循环,电动缸无需润滑维护
?? 标准尺寸可输出4000‐55000N 的持续推力
?? 与其他伺服焊枪执行器相比,体积更小、重量更轻
?? 采用滚柱丝杠传动,寿命是滚珠丝杠的15 倍
?? 噪音更低
?? 比气缸更节能
?? 在无力传感器力情况下,压力控制的重复度可达±1.5%
?? 位置定位精度高,重复性好
?? 多种缸体安装方式
?? 减少焊接循环时间,每分钟焊接次数更多
?? 可与任意伺服驱动器、机器人控制器匹配使用
?? 多种行程长度和法兰尺寸,适用广泛应用要求
?? 内置电机的一体化结构设计,机械刚性高




 投诉建议
投诉建议
提交
A1 系列伺服驱动器使用说明书_v1.2.22

乐创 A1 系列伺服系统控制产品手册v1.2

乐创技术:期待新三板更市场化

乐创DSP3000M滴塑机控制系统

乐创 i3运动控制平台