


E4简易智能电动车的设计方案
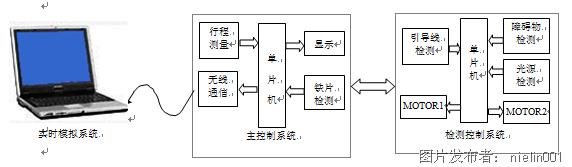
采用以AT89C52为中心控制器的智能控制系统,实现电动车的智能控制功能。系统总体设计框图如下图:
方案论证:
计时
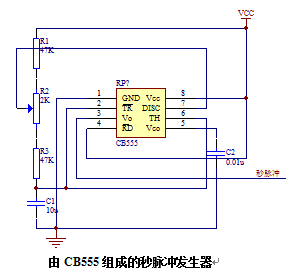
方案一:在需用秒脉冲时,大部分设计采用555定时器组成秒脉冲多谐振荡器。电路图如图所示:
这种设计有一定的优势,只需硬件设计好,无需软件设定,该电路即可输出恒定的秒脉冲。但该电路功耗较大,且只能提供简单的脉冲信号。
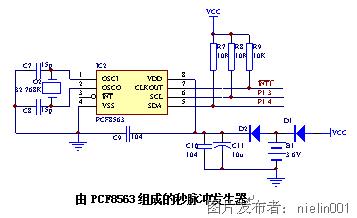
由PCF8563组成的秒脉冲发生器
方案二:采用由PCF8563日历时钟芯片组成的电路提供秒脉冲。该部分硬件电路如图:
设定好PCF8563的CLKOUT输出频率控制字,即可输出所需频率的脉冲信号,在本设计中所用频率为1Hz。单片机在该秒脉冲的作用下可实现计时、C点停留5S等功能。并且在给PCF8563送入初始的日历信息后, PCF8563中的日历就会自动运行,经单片机读取、处理后就可以在液晶显示器上显示当前日历。而且该部分电路还加了掉电保护功能,在主供电系统意外断电时,即Vcc为0V时,D1截止, 3.6V备用电源通过D2继续给PCF8563供电,保证8563的正常运行。因此在本系统中采用方案二。
行程测量
方案一:采用开关式霍尔元件
将磁铁固定在小汽车的车轮上,当车轮转动时,磁铁也跟着转动,霍尔元件感应到磁场的变化时,就会产生通断效果,使单片机的定时器T0的输入端产生高低电平的变化,从而使得T0计数小汽车车轮转的圈数,假设为N,并设车轮的周长为L,通过S=N*L,就可以计算出小汽车在一段时间内的行程。这种测量方法的测量数据只能是车轮周长的整数倍,误差较大。例如:小汽车的车轮半径为1cm,那么这种测量方法的最小误差就可达到6cm
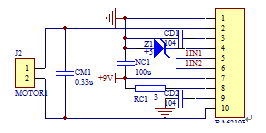
方案二:采用透光式光电传感器,硬件电路如图。
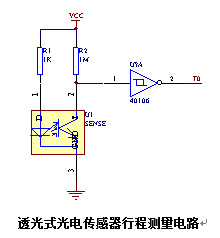
透光式光电传感器行程测量电路
在小汽车的车轮上钻若干小孔,设小孔的个数为n。在车轮转动时,发光二极管发射的光被没有孔的地方遮挡时,光敏三极管不能导通,光敏三极管的集电极输出为高电平,经CD40106反相后,单片机定时器T0的输入端为低电平。在有小孔的地方,发光二极管发射的光就会透过小孔照射到光敏三极管上,使光敏三极管导通,此时光敏三极管的集电极输出为低电平。在经CD40106反相后,单片机定时器T0的输入为高电平。单片机定时器T0就会准确记录下这种高低电平的变化的次数,即通过的小孔的个数。假设为N, 并设车轮的周长与方案一的相同也是L,某段时间内的行程计算公式为:S=N*L/n,可以看到这种测量方法的最小误差为方案一的1/n,可较为精确地测量出小汽车的行程。并且可以进行误差控制,因为孔的个数与误差成反比,要想提高准确度只要增加小孔的个数就可以。故采用方案二。
电机控制
由于电动车采用了前面使用万向轮,两个后轮各一个电机驱动的驱动方式,所以可使电动车旋转360度,这样即使光源在电动车的后方,电动车也可以通过在原地不断旋转的方式找到光源的准确位置,从而完成寻找光源,入库等功能。在电动机的控制上有两种方案可供选择。
方案一:利用9012、2SC8050、及电机构成驱动电路。
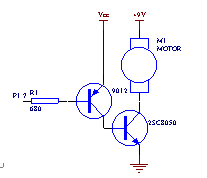
如果单片机89C52控制口P1.7输出高电平,9012截止,2SC8050截止,电机停止运转。单片机89C52控制口P1.7输出低电平时,9012导通,2SC8050导通,电机开始运转。该电路比较简单,输出功率足够大,足以推动电机工作,并且电机工作时三极管性能非常稳定。但该方案中单片机部分和电机供电部分没有完全隔离,而电动机在切换时会产生巨大的反电动势,经常烧坏单片机。
方案二:利用BA6219B及其外部辅助电路和电机构成驱动电路。
单片机控制口接BA6219B的两个输入控制端IN1,IN2。BA6219的两个输出端OUT1(2),OUT2(10)接电机。
电机转动状态编码:
左电机 | 右电机 | 左电机 | 右电机 | 电动车运行状态 | ||
1IN1 | 1IN2 | 2IN1 | 2IN2 | |||
1 | 0 | 1 | 0 | 正转 | 正转 | 前行 |
1 | 0 | 0 | 1 | 正转 | 反转 | 左转 |
1 | 0 | 0 | 0 | 正转 | 停 | 以左电机为中心原地左转 |
0 | 1 | 1 | 0 | 反转 | 正转 | 右转 |
0 | 0 | 1 | 0 | 停 | 正转 | 以右电机为中心原地右转 |
0 | 1 | 0 | 1 | 反转 | 反转 | 后退 |
根据上表可知,只要设定两块BA6219B的1IN1,1IN2,2IN1,2IN2四个控制端口的不同编码,就可得到电动车的前进,后退,旋转等不同的运行状态;且BA6219B的最大输出电流为2.2A,可使电动车快速运行。故采用方案二。
方案一:红外光方式
红外通信只适用于室内静止或慢速移动中的点对点通信,方向性要求高,对于运动中的小汽车传输过程中易产生误码,性能不稳定。
方案二:使用无线MODEM(RF2000)
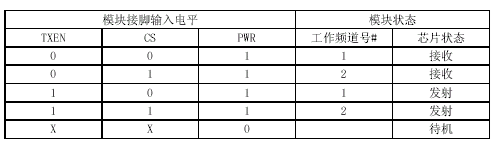
RF2000采用Nordic公司的nRF401芯片,它是一种RF无线收发芯片,一个RF2000模块即可以接收数据也可以发送数据。但属于半双工工作方式。接收与发送方式选择由TXEN控制。而且有两个工作频道可供选择:工作频道一:434.33MHz;工作频道二:433.92MHz。
工作模式控制及工作频道选择:
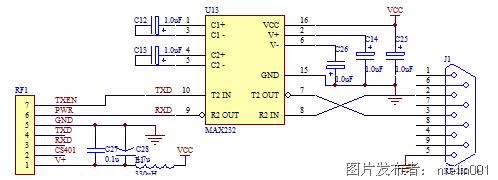
主控制系统与RF2000的连接电路图如图。
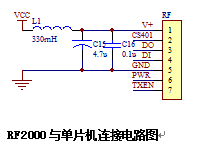
DI、DO分别接单片机的TXD、RXD。接主控制系统的RF2000始终为发射方。CS401,PWR,TXEN始终置0,1,1。也就是工作在工作频道1-434.33MHz,发射状态。
接上位机的RF2000始终为接收方,CS401,PWR,TXEN始终置0,1,0。也就是工作在工作频道1-434.33MHz,接收状态。使用RF2000设计比较简单,且不受外界环境影响,具有较低的发射功率和较高的接收灵敏度,并且可工作在较低速率下如常用的单片机串口波特率9600bps。采用FSK调制方式,抗干扰能力强。基于以上诸多优点所以在本系统中无线通信部分采用了方案二的设计。
运行情况测试
测试仪器清单:秒表,函数发生器,示波器,频率计等
测试过程及测试数据:
在单项模块测试完成之后,进行组装整体测试。组装后的整车尺寸为28cm(长)*18cm(宽)*15cm(高)。
首先按照题目要求制作场地如下:

场地内全部敷设白色绘图纸,并用透明胶带固定。在白纸下面按要求放置4块铁片,其中最后一块置于C点。然后用毛笔绘制边线及引导线。
首先将整车放于起点处,上电后通过声音信号启动运行。小车正确感应到铁片,发出声光指示信息。小车正常寻迹运行到C点之后,在C点停留5秒,然后小车重新启动,朝光源方向直线行使,直至检测到前方出现障碍物。在检测到障碍物之后,小车左转90度行驶,绕过障碍物,继续向光源方向行驶,直至进入车库后检测到黑色边线,停止运行。小车在经过C点之后的路线如图所示。
下表为连续十次的运行时间:
次数 | 1 | 2 | 3 | 4 | 5 |
运行时间 | 75s | 68s | 69s | 74s | 60s |
次数 | 6 | 7 | 8 | 9 | 10 |
运行时间 | 62s | 74s | 65s | 70s | 64s |
由上表数据可知,本系统完全可以在90秒之内完成题目所要求的各项任务,并实现无线传输,声控等创新功能。




 投诉建议
投诉建议
提交

自动化机床的故障排除技术浅析

安川焊接机器人编程
ABB机器人控制软件RobotWare应用手册SafeMove(英文)

ABB IRB7600 机器人维护信息

ABB IRC5P机器人培训教材