


图解六足移动机器人的构造
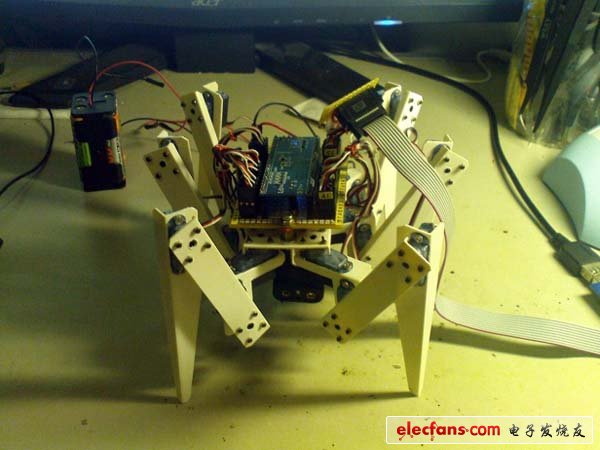
● 各位观众,接下来是关键的一个动作——从趴着的状态下自行站起来。
● 它站起来了!没错,它完全靠自己的力量站起来了!
● 虽然有点艰难,站起来后还是有点歪歪扭扭的,但终究是站起来了。(开始一直担心舵机的力量不足,不能自己站起来……)

● 站起来后的俯视图。
● 舵机的力量确实不足,小腿必须是直的(斜的话撑不起来)。而且虽然站起来了,但是舵机由于力矩偏小,还是有点吱吱的抖动。
● 这还没有装上电池,希望加上电池的重量后舵机还能顶住。
2、 完善供电
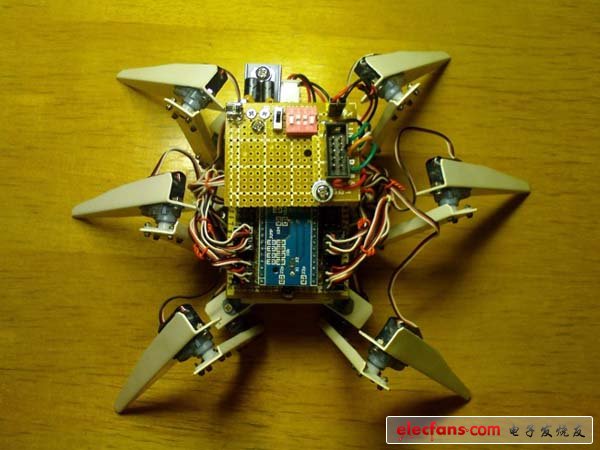
● 本来希望把舵机和单片机的电源完全独立分开,以避免干扰,最后是只用了一个组电池:舵机直接接电池,单片机通过稳压电路连接同一组电池,实践证明中间的稳压电路还是能够很好的实现抗干扰的隔离功能。
● 舵机供电,开始曾经考虑过用2节5号镍氢电池通过一个DC-DC大电流升压板的升压到5V给所有舵机供电,经实验后发现完全行不通——18个舵机需要的电流太大了,最后只能考虑直接用2节3.7V的7号锂电串联起来供电。

● 翻过来,可以看到底部的电池。
● 单片机供电,本来考虑采用一节7号镍氢电池通过一个块微型DC-DC升压板升压到5V,为缩小体积后来也考虑过用3V的CR2032纽扣锂电升压,但实际调试后发现电流也较大一下子就耗光电池了。最后是用一块7805稳压小板直接接到2节锂电上获得5V电压。 关于微型升压板:http://item.taobao.com/item.htm?id=4039234002
3、 完善电路

● 给电路上加上了几个控制开关(总电源、舵机电源、单片机电源、单片机复位)。
● 接USBASP的10Pin插座也固定在了顶部的线路板上。





 投诉建议
投诉建议
提交

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机