


旋转编码器之原理
光栅型编码器分为长形及圆形兩种,长形如一根尺规,圆形有如刻度盘,在大多數情况下线宽与间距的宽度相等亦即明暗等距,在测量长度时采用长光栅,测量角度采用圆光栅。 线宽与间距和称为光栅的栅距,制造光栅的方法分为直接刻划、曝光复制与滚压制造等,光栅材料分为玻璃透射式、金属反射式及钢带反射式,依光栅表面形狀又分为黑白幅值光栅或相位光栅,黑白幅值光栅的栅线与间距是黑白等距相间,而相位光栅其光栅的横截面为锯齿狀即三角波狀或弦波狀,本文将针对旋转编码器的基本原理与设计包含光源、光栅、光侦测器及讯号分析介绍。
一、旋转编码器种類
旋转编码器可作为旋转运动、角速度测量感测器,也可与机械测量载体,例如导螺杆聯用,用于测量直线运动。 应用領域包括马达、工具机、木工机械、纺织机械、机器人和运送设备以及各种测量、测试和检验设备。
旋转编码器可分为应用光学光栅原理和磁性磁栅原理兩類,由于使用光学光栅原理的光学式旋转编码器比使用磁性原理的磁式旋转编码器具有精度高,光感测元件來源较多,与容易制作等优点,光学式旋转编码器目前在技术与生产产量上皆居于主流地位。 但由于应用磁性磁栅原理的磁式旋转编码器抗环境污染能力强,于编码式定位量测系统旋转编码器市场上仍占一席之地。光学式旋转编码器主要是由中心轴、主光栅盘、副光栅、发光二极体及光侦测器组成。 LED的光源可以经由主光栅盘、副光栅至光侦测器,当主光栅盘随中心轴旋转时,光侦测器便收到不同的光源并依次产生讯号。 旋转编码器根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种,增量式旋转编码器在角度测量和角速度测量较绝对式旋转编码器更具有廉价和简易的优势。 但针对高精度的伺服系统而言,提高伺服系统的精度,首先必须提高位置反馈的精度,因此随着精度要求的提升,绝对式旋转编码器日渐重要。
光学式轴编码器主要构成为一个可旋转圆盘,其周围边缘有许多细缝之槽孔。 在圆盘的一侧放置光源,另一例放置光感测器。 当圆盘旋转时,光感测器即接收到on-off的脉波,计算脉波的數量,即可计算出旋转的角度或位移长度。 光学式轴编码器,可分为增量式及绝对式编码器兩种型式,兩者主要差别在于输出信号不同,前者输出为A、B相之方波;后者输出为特定之數位码,在编码器解析度范围内之任一角度,均有唯一之码对应。
A. 增量型光学编码器一旋转轴带动刻有光栅的圆盘,兩侧分别摆放发光二极体与光电检测器,发光二极体光线若透过光栅让光电检测器接受到,所以当圆盘不断旋转光电晶体将持续送出on与off讯号,我们只要记錄讯号出现的數目即可计算出旋转角度。 当然圆盘的光栅愈密,所能量测的角度位置精度越高。 需要提高分辨率时,可利用90度,相位差A,B兩路信号,对原脉冲进行倍频。
B. 绝对光学编码器绝对编码器的码盘是由一系列同心圆的轨道组成。 每层轨道以从外向裡按轴位代码的二进制的权分割成等距的区段,外层轨道为最低位,内层轨道为最高位。 二进制码优点是可直接进入计算机工作,但它在交界面上会出现错讀,并且随着码盘输出值的增加,讀數误差也伴随增大。 例如在二进制码盘,0与15的交界面上,由于工艺和装配的因素可能讀成1111或0000以外,任何數字都可出现,即发生非单值性,这就产生讀數误差。
增量式旋转编码器量测目前位置的方式由原点开始计數量测步距,或细分割信号周期并计數,增量式编码器具有參考点,开机时必须执行原点復归操作,以建立机械基准点。 具换向信号的旋转编码器可提供转轴的角度位置而无需测量前移动,其精度足以正确地控制永磁式三相马达旋转磁场的相位。 而绝对式角度编码器和旋转编码器无需执行原点復归就能直接量测目前位置值。 单转式是绝对编码器可提供一转内的位置值,而多转式编码器还能区分不同转數的位置值。 由于增量编码器比绝对编码器使用码盘轨道少,这样,它的导线數、滑环數、讀出器、电路和显示元件保持最低,使得系统可靠性增大,成本降低。 因此,现代系统多倾向采用增量编码器。 增量编码器主要缺点是测量仅相对于一个固定点,假如这个点有误差,整个系统受损害。 另一个问题是当电源出现故障时,常常导致數据丢失,须使用辅助數据记忆技术,以防止丢失。
二、光学式编码器基本原理
光学式编码器依其形狀分为圆形及线型(光学尺)兩种,依检测方式分平行狭缝方式、莫尔条纹方式、纵向条纹方式,依光学特性分反射式及穿透式兩种。 目前光学式编码器大部份采用平行狭缝方式,基本光学式旋转编码器之设计如图1所示,其原理为使用一个带有主光栅之码盘(main scale)及副光栅(Index grating )、光源及光侦测模组。 码盘、副光栅相对转动,通过之光强产生变化,形成周期性三角波讯号,因绕射关系实际输出波型近似正弦波如图,输出讯号周期与主光栅之栅距相同,因此通过计數器可數出码盘、副光栅相对转动角度。 因应定位系统的需求,旋转编码器必需有A、A1、B、B1、Z1及Z2等六个讯号输出,传统设计上就必需有六对光源与光侦测器模组,光源部份其目的在发出近似平行的红外光,穿过光栅,到达光侦测器,副光栅作用是与主光栅重叠以产生位移讯号,副光栅上共分成A、A1、B、B1、Z1及Z2,Z之设计是在每圈产生宽度在栅距内之脉冲讯号做为參考,又称为零位光栅。 最后由光侦测模组将光强讯号转为电流讯号。 以下将分别针对各模组一一介绍。
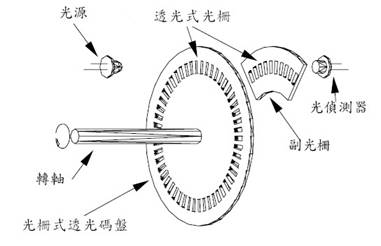
图1 基本光学式旋转编码器构造




 投诉建议
投诉建议
提交

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机