


Kinco智能伺服在贴标机上的应用
(一)系统介绍
所设计的贴标机是为方形箱体(包装箱)自动粘贴背胶标签的设备。同等大小的标签在输出时等间隔地排列在带状材料上,卷在储藏轮上。通过调整贴标机的参数可处理不同的标签料卷。标签的排列精度要求在产品(包装箱)速度50米/分钟内<0.5mm。
(二)系统工作原理
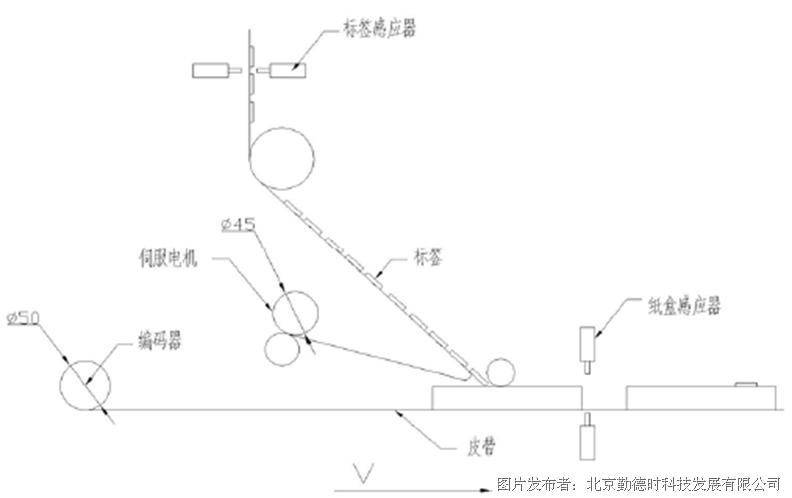
贴标机的工作原理如下(图1)
产品(此处为箱体)随外部的驱动的传送带移动。传送带的摩擦辊上装有编码器(主编码器)。光学产品传感器应用光遮蔽原理,当传送带上产品进出传感器工作区域而产生信号。标签排列在带状材料上,卷在储藏轮上。一个摆轮机构用于制动标签储藏轮,释放时标签带可以被拉动。标签带绕过贴标头的尖角,在此处标签从背基上分离,由压辊压贴在通过的箱体上。分离了标签的背基料带绕过贴标头被一对摩擦轮夹持并牵引。此摩擦轮机构由一只Kinco伺服电机驱动,同时带动计数器。此机构包含一个基带防滑张紧轮。贴标头前方,标签带上方配有一个标签传感器,当检测到一个标签时便产生一个信号。

贴标头如此的构造和标签如此处理保证了没有标签随标签带绕过贴标头。当标签被剥落时,如没有产品在下面经过,标签便掉落在传送带上。贴标头和压贴轮结构,产品上表面和贴标头的间距,和标签带以及标签的材料有密切的关系,保证了标签的前沿在正确的位置和产品接触。
(三)自动运行
在一个处理过程中,贴标驱动定位,将一个标签准备在贴标头上,标签被控制在已有几个毫米从标签带上剥离的位置。
传送带上的产品前缘进入传感器探测位置,延时启动贴标驱动装置。标签以“趋于同步方式”被加速到产品的通过速度,使得其与产品同步。标签被压贴辊压贴在产品上,彻底与基带分离。标签与产品的同步使得标签能够贴置在每件产品相对于被传感器探测到的前缘的同样位置。与此同时,标签传感器探测到标签的边沿,开始减速,并在下一枚标签处于预备位置时贴标驱动随之停止。到此一个贴标过程结束。传送带继续运行大于一个最短间距(启动闭锁),直到下一个产品的前沿被探测到,一个新的贴标过程开始。
(四)应用说明
贴标驱动由一台kinco伺服电机实现。机器包括一个PLC处理器、eView MT500、一些按钮。该PLC通过RS232接口与kinco伺服驱动器连接,通过24V数字信号触发驱动器内部的firmware程序。以下是kinco伺服驱动器特性的介绍。
1.kincoED伺服接口
产品传感器:接至DIN2,该传感器要求PNP24V输出,
标签传感器:该信号接至Master Encoder X7的N接口,X7的N信号口可以响应16khz的信号。该传感器要求PNP 5V输出,
贴标故障: 由OUT1口输出24V高电平
贴标I.O. : 由OUT2口输出24V高电平
就位/无故障: 由Ready口输出24V高电平
主编码器: 信号A/A.B/B来自X7,该编码器输出信号要求RS422,供电电源5V。
电机编码器: 接至驱动器X8口
电机: 接至驱动器X9口
RS232: 驱动器X5口
2.用户界面
贴标操作模式(mode_of_operation=-20)是firmware V0410的特有功能。通过该模式,以及软件中一些地址设置进行设置,可以非常方便的实现自动运转和其他附加功能。
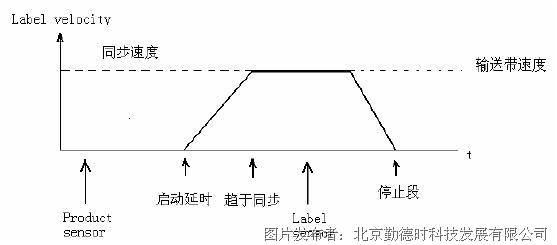
Product sensor(产品传感器)在检测到产品边沿时,产生一个24VL->H的上升沿信号,输入给kinco驱动器的Din2口,此信号对来自于Master Encoder的计数清零(25090620/25090720)。由于Kinco的Din口存在此传感器与kinco硬件端口间存在延时。通过一个250us的启动补偿平衡。当行程计数器达到启动延时的值,应用二次方程计算出继续运转的行程脉冲数和标签驱动的额定位置间的行程之间关系。此计算实现了贴标驱动和传送带间的行程同步:
行程计数器=启动延时+趋于同步行程
标签从起点到标签行程=趋于同步行程/2的位置
从这个位置起,标签与产品的相对位置保持不变,当标签接触产品时完全一致,因为同步行程已经开始。
之后,标签的前沿和产品的前沿的距离——粘贴的位置就确定了。
A:贴标前标签的前沿与产品传感器的间距
贴标点=启动延时-A+趋于同步行程/2
注意:此趋于同步过程要求一个动态参数调整器控制电机达到相应的加速。
3.标签边沿的探测和制动
标签驱动通过摩擦轮实现,有打滑的可能。轻微的滑动,经在标签带长度上的积累会变得明显。标签传感器可修正打滑造成的累计误差,同时检查标签带上有无标签。传感器并不确定探测到的是标签的前沿还是后沿。
也不能分辨一个标签直接绕过贴标头还是几个粘在一起。传感器在贴标头前面越远,标签在基带上排列的不均匀对贴标精度的影响就越大。
标签传感器产生的24VL->H在64us内进入Master encoder输入口N,确定电机位置,并被储存。位置数据加上停止行程,结果决定标签的粘贴位置。
没有标签传感器的信号,贴标驱动器将在每一次贴标中将同步行程区间设为最大。这一行程结束时传感器仍未释放,被认为是一个贴标故障。
注意:参数化制动减速应在尽可能高的贴标速度下在停止行程内完成。驱动系统必须满足相应的动力。由于调整不当会发生对于粘贴位置的驱动过量,然后回位的情况(这种情况往往发生在减速度设定值过小时),适当释放标签带在贴标头上的张紧力。




 投诉建议
投诉建议
提交

打好3.0工业基础迈向4.0工业强国
物联网和智能机器将引爆下一场技术变革?
《穹顶之下》背后折射的不合理能源结构
外资制造业接连撤离中国 人口红利渐失
被疯抢的智能马桶盖与中国制造业升级