


用西门子PLC构成四节传送带控制系统举例
一、设计目标
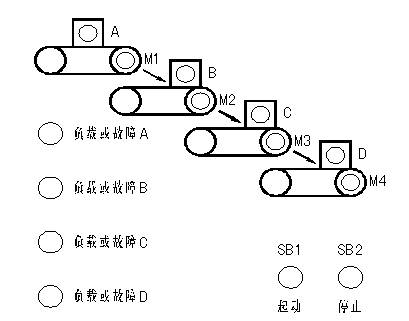
用PLC构成四节传送带控制系统
二、实验内容
1. 1. 控制要求
起动后,先起动最末的皮带机,1s后再依次起动其它的皮带机;停止时,先停止最初的皮带机,1s后再依次停止其它的皮带机;当某条皮带机发生故障时,该机及前面的应立即停止,以后的每隔1s顺序停止;当某条皮带机有重物时,该皮带机前面的应立即停止,该皮带机运行1s后停止,再1s后接下去的一台停止,依此类推
2.I/O分配
输入 输出
起动按钮: I0.0 M1:Q0.1
停止按钮: I0.5 M2:Q0.2
负载或故障A:I0.1 M3:Q0.3
负载或故障B:I0.2 M4:Q0.4
负载或故障C:I0.3
负载或故障D:I0.4
三、四节传送带故障设置控制语句表
1
LD
I0.0
36
LD
T41
71
R
Q0.3,1
2
O
M0.1
37
R
Q0.3,1
72
=
M1.3
3
A
I0.5
38
=
M0.6
73
LD
M1.3
4
AN
I0.1
39
LD
M0.6
74
TON
T47, 10
5
AN
I0.2
40
TON
T42, 10
75
LD
T47
6
AN
I0.3
41
LD
T42
76
R
Q0.4,1
7
AN
I0.4
42
R
Q0.4,1
77
LD
I0.3
8
S
Q0.4,1
43
LD
I0.1
78
O
M0.4
9
=
M0.1
44
O
M0.7
79
AN
I0.0
10
LD
M0.1
45
AN
I0.0
80
R
Q0.1,1
11
TON
T37, 10
46
R
Q0.1,1
81
R
Q0.2,1
12
LD
T37
47
=
M0.7
82
R
Q0.3,1
13
S
Q0.3,1
48
LD
M0.7
83
=
M1.4
14
=
M0.2
49
TON
T43, 10
84
LD
M1.4
15
LD
M0.2
50
LD
T43
85
TON
T48, 10
16
TON
T38, 10
51
R
Q0.2,1
86
LD
T48
17
LD
T38
52
=
M1.0
87
R
Q0.4,1
18
S
Q0.2,1
53
LD
M1.0
88
LD
I0.4
19
=
M0.3
54
TON
T44, 10
89
O
M1.5
20
LD
M0.3
55
LD
T44
90
AN
I0.0
21
TON
T39, 10
56
R
Q0.3,1
91
R
Q0.1,1
22
LD
T39
57
=
M1.1
92
R
Q0.2,1
23
S
Q0.1,1
58
LD
M1.1
93
R
Q0.3,1
24
LD
I0.5
59
TON
T45, 10
94
R
Q0.4,1
25
O
M0.4
60
LD
T45
95
=
M1.5
26
AN
I0.0
61
R
Q0.4,1
27
R
Q0.1,1
62
LD
I0.2
28
=
M0.4
63
O
M1.2
29
LD
M0.4
64
AN
I0.0
30
TON
T40, 10
65
R
Q0.1,1
31
LD
T40
66
R
Q0.2,1
32
R
Q0.2,1
67
=
M1.2
33
=
M0.5
68
LD
M1.2
34
LD
M0.5
69
TON
T46, 10
35
TON
T41, 10
70
LD
T46
四、四节传送带故障设置控制梯形图

五、四节传送带载重设置控制语句表
1
LD
I0.0
38
=
M0.6
75
R
Q0.2,1
2
O
M0.1
39
LD
M0.6
76
=
M1.3
3
A
I0.5
40
TON
T42, 10
77
LD
M1.3
4
AN
I0.1
41
LD
T42
78
TON
T48, 10
5
AN
I0.2
42
R
Q0.4,1
79
LD
T48
6
AN
I0.3
43
LD
I0.1
80
R
Q0.3,1
7
AN
I0.4
44
O
M2.1
81
=
M1.4
8
S
Q0.4,1
45
AN
I0.0
82
LD
M1.4
9
=
M0.1
46
TON
T43, 10
83
TON
T49, 10
10
LD
M0.1
47
=
M2.1
84
LD
T49
11
TON
T37, 10
48
LD
T43
85
R
Q0.4,1
12
LD
T37
49
R
Q0.1,1
86
LD
I0.3
13
S
Q0.3,1
50
=
M0.7
87
O
M2.3
14
=
M0.2
51
LD
M0.7
88
AN
I0.0
15
LD
M0.2
52
TON
T44, 10
89
R
Q0.1,1
16
TON
T38, 10
53
LD
T44
90
R
Q0.2,1
17
LD
T38
54
R
Q0.2,1
91
=
M2.3
18
S
Q0.2,1
55
=
M1.0
92
LD
M2.3
19
=
M0.3
56
LD
M1.0
93
TON
T50, 10
20
LD
M0.3
57
TON
T45, 10
94
LD
T50
21
TON
T39, 10
58
LD
T45
95
R
Q0.3,1
22
LD
T39
59
R
Q0.3,1
96
=
M1.6
23
S
Q0.1,1
60
=
M1.1
97
LD
M1.6
24
LDN
I0.5
61
LD
M1.1
98
TON
T51, 10
25
O
M0.4
62
TON
T46, 10
99
LD
T51
26
AN
I0.0
63
LD
T46
100
R
Q0.4,1
27
R
Q0.1,1
64
R
Q0.4,1
101
LD
I0.4
28
=
M0.4
65
LD
I0.2
102
O
M2.4
29
LD
M0.4
66
O
M2.2
103
AN
I0.0
30
TON
T40, 10
67
AN
I0.0
104
R
Q0.1,1
31
LD
T40
68
R
Q0.1,1
105
R
Q0.2,1
32
R
Q0.2,1
69
=
M2.2
106
R
Q0.3,1
33
=
M0.5
70
LD
M2.2
107
=
M2.4
34
LD
M0.5
71
TON
T47, 10
108
LD
M2.4
35
TON
T41, 10
72
LD
T47
109
TON
T52, 10
36
LD
T41
73
R
Q0.2,1
110
LD
T52
37
R
Q.3,1
74
=
M1.3
111
R
Q0.4,1
六、四节传送带载重设置控制梯形图




 投诉建议
投诉建议
提交

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机