


智能型电动执行机构的可靠性设计及验证
电动执行机构是自动控制领域常用的机电一体化设备,广泛应用于火电、石化、冶金、市政等领域。电动执行机构接受标准控制信号,输出对应的转角或者直线位移,从而对阀门进行控制和调节,达到对被调参数进行调节的目的,如:温度、压力、流量、液位等,使生产过程按预定要求进行,是过程自动控制系统中的重要执行设备。
电动执行机构一般都安装在环境相对比较恶劣的位置,有时与阀门一起安装在半空,损坏时维修非常困难。电动执行机构一旦出现故障,轻则导致管路无法调节,影响生产的正常进行,重则引起阀门损坏甚至生产事故。因此电动执行机构的可靠性显得尤为重要,而产品开发阶段的可靠性设计是产品稳定可靠的重要前提,量产前的大量测试更是对产品可靠性的验证和重要保证。
下面以科远S系列多回转电动执行机构为例,以其关键组成部分及技术为出发点,对其可靠性设计及验证进行论述。


智能型电动执行机构的关键零部件及技术
电动执行机构主要由电机及其正反转控制系统、减速传动系统、手/电动切换系统、阀位检测反馈系统、电气控制系统等部分组成。电动执行机构的电机输出运动与动力,通过减速传动系统将动力传至输出轴,输出转矩或者直线位移,带动阀门动作。阀位检测反馈系统实时检测阀位,并将数据传送至电气控制系统。电气控制系统根据接收的控制信号通过正反转模块控制电机的正反转,使执行机构运行到指定位置。当执行机构在控制系统出现故障或者断电的紧急情况下,可以通过手动系统将执行机构运行到所需位置,避免造成进一步的危害。

其中,减速传动系统涉及到蜗轮蜗杆传动技术,其可靠性及寿命直接决定了执行机构在机械方面的寿命。阀位检测反馈系统中大小锥的有效啮合和绝对光电编码器的正常运行是技术难点。手电动切换系统除了保证电动状态正常切换到手动状态外,保证手动操作者的安全也非常重要。当执行机构频繁调节时,电机正反转模块需要良好的散热性。在执行机构的故障点中,由上述技术点出问题而造成的故障占80%左右。因此,从这些技术点出发,进行可靠性设计及验证是确保执行机构性能稳定可靠的关键。
执行机构的可靠性设计及验证
l 减速传动系统
 S系列多回转电动执行机构的减速传动系统由一级蜗轮蜗杆啮合实现,蜗轮蜗杆传动结构紧凑,传动平稳,噪音低,是力矩传动关键零件。蜗轮蜗杆传动的另外一个重要特性是当导程角达到一定角度时,可以自锁,即当执行机构停止运转时,阀门在管道压力的作用下也不能带动蜗轮倒转,从而使执行机构稳稳的停在预定位置。蜗轮蜗杆性能及寿命的影响因素非常多,比如材料选择、热处理工艺、模数的设计等,同样的箱体结构及中心距,若三者不同,则其可靠性和寿命会相差很多。
S系列多回转电动执行机构的减速传动系统由一级蜗轮蜗杆啮合实现,蜗轮蜗杆传动结构紧凑,传动平稳,噪音低,是力矩传动关键零件。蜗轮蜗杆传动的另外一个重要特性是当导程角达到一定角度时,可以自锁,即当执行机构停止运转时,阀门在管道压力的作用下也不能带动蜗轮倒转,从而使执行机构稳稳的停在预定位置。蜗轮蜗杆性能及寿命的影响因素非常多,比如材料选择、热处理工艺、模数的设计等,同样的箱体结构及中心距,若三者不同,则其可靠性和寿命会相差很多。
在S系列多回转电动执行机构的设计过程中,对蜗轮蜗杆传动的温升、振动、疲劳断裂等方面进行了研究(核心期刊《机械传动》发表论文3篇【1-3】,申请专利1项【1】)。所有规格的蜗轮均采用了耐磨性能良好的铝青铜,蜗杆也进行了调质及淬火处理。在测试验证过程中发现,SY018-B(110N.m)、SY025-B(450N.m)、SY040-B(1200N.m)规格产品的蜗轮蜗杆寿命均超过了国家电力行业标准《电站阀门电动执行机构》规定寿命的5倍以上(调节次数大于100万次),达到了国内领先的水平。但SY035-B(610N.m)规格产品的寿命是20多万次,虽然达到了国标要求,但是与其他规格产品相比,还有不少差距。
分析发现,由于蜗杆刚度不足,传动中振动较大等原因造成了SY035-B(610N.m)的寿命相对较短。于是根据现有其他规格产品的测试数据,在不调整现有箱体及中心距的情况下,对蜗轮蜗杆参数重新进行了设计计算,其蜗杆横向受力及刚度的计算过程如下:
由蜗杆受力计算公式可以得到:

根据刚度条件:

蜗杆危险界面的惯性矩:

其中:

则蜗杆最大挠度与许用最大挠度的比值为: ;
;
虽然i>1,但是目前文献中关于蜗杆刚度计算的公式中均未引入寿命参数,而且电动执行机构中蜗轮蜗杆的使用工况与常规产品不同,为了确保改进设计后蜗杆寿命合格,对其余规格产品的蜗杆参数进行了统计比较,发现i均大于1.624;同时也发现改进前的蜗杆i=7.845,与其余规格相比大得多。
规格型号 | SY018-B | SY025-B | SY035-B | SY040-B | |
m=2.2 | m=2.1 | ||||
I=y/[y] | 3.1 | 5.35 | 7.845 | 1.625 | 3.66 |
整机输出载荷 | 110N.M | 450N.M | 610N.M | 610N.M | 1200N.M |
蜗杆实测寿命 | >100万次 | >100万次 | >20万次 |
| >100万次 |
蜗轮的齿根弯曲强度和齿面接触疲劳强度经校核后,均符合要求。根据计算结果,将蜗轮蜗杆的模数由原来的2.2mm调整至2.1mm,其余参数及其他零件未变,经寿命测试验证,改进后的蜗轮蜗杆寿命提高到5倍,使执行机构的调节次数达到110万次,超过了国家标准规定的5倍以上,从而使执行机构的可靠性及寿命大大提高。
l 阀位检测反馈系统
阀位检测反馈系统主要包含了大小锥齿轮传动和绝对光电编码器,是通过二者结合将执行机构输出轴的转动圈数(即阀门位置)反馈至电气控制系统。
ü 锥齿轮传动的可靠性设计
大小锥传动的两个齿轮呈90�交错安装,满足了改变传动方向的需求。但是由于结构限制,大小锥又不能完全固定,如果大小锥啮合太多,则会导致卡死,无法正常传动;如果啮合太少,会导致跳齿或者脱齿,阀位无法检测,执行机构停止运行或者阀位过冲,严重时会损坏阀门,因此大小锥齿轮安装距的可靠性设计尤为重要。其中SY018-B(110N.m)规格产品由于大小锥结构尺寸小,理论啮合高度只有1.52mm,对装配设计的误差要求高,在产品研发测试阶段出现了个别传动脱开现象。针对此隐患,设计分析后发现由于深沟球轴承存在一定的轴向游隙(一般设计中是不考虑的),开阀时,由于蜗轮轴受到向上的力,会带动大锥一起向上移动,导致大小锥啮合高度变小而脱开,因此在大小锥的啮合尺寸链计算中需要考虑轴承轴向游隙的影响。其啮合尺寸链的计算过程如下,将大锥的安装距作为封闭环(轴承考虑轴向游隙后,轴向宽度为: ):
):

A=138-11.3-12-108+83.6+9.5-1.5-79=19.3,
上偏差:ES=0.1-(-0.1)-(-0.25)-(-0.15)+0.2+0.2-(-0.15)-(-0.05)=1.2,
下偏差:ES=0-(-0.05)-(-0.1)-(-0.05)+0.1+0.1-0.05-0.05=0.4,
则= ,
,
即大锥齿轮装配后的实际安装距是19.7~20.5mm,此时大小锥齿轮的两个极限啮合齿高为0.42mm~1.26mm,如果冲击过大或者制造误差较大,则有脱开隐患。根据计算结果,综合考虑既不能卡死、也不能脱开,将大锥齿的实际安装距向小锥齿轮方向调整了0.3mm,经过近500台的实际测试验证,没有出现大小锥卡死或者脱开的情况,保证了产品的可靠性。
ü 绝对光电编码器的可靠性设计及验证
绝对光电编码器是集机、光、电、材料等技术于一体的复杂零部件,采用16位光电格雷码。相比其它编码器或者阀位采集方式,不但精度高,而且在执行机构掉电情况下运行,依旧可以正确记录码值,阀位不丢失。绝对光电编码器的箱体及计数齿轮由于结构复杂,一般都采用注塑件,在高温环境中难免会产生热胀冷缩,引起计数齿轮卡死或者计数通光孔偏离位置,导致编码器无法正常采集码值。此外由于发光二极管的光强会随着时间衰减,如果物料选型不合格或者电气参数选择不合理,将会导致绝对光电编码器码值采集出错。正是因为绝对光电编码器技术复杂、高温环境中使用的易出错、成本高等特点,很多执行机构厂家不得退而求其次,采用不能在掉电情况下记录阀位的增量式编码器。而一些使用了绝对光电编码器的执行机构,也常常由于此零部件的原因导致执行机构出现故障。
科远股份的绝对光电编码器在研发阶段也曾受此类故障困扰,后从产品可靠性和本着对客户负责的态度出发,下决心对注塑件的抗变形技术及采集电路进行研究(申请发明专利1项【2】、软件著作权2项【3-4】),从设计的源头上保证科远绝对光电编码器的性能稳定可靠,注塑件采用特殊材料并对零件进行抗变形处理,并选用高品质发光二极管,解决了此难题。
为了验证改进后产品的可靠性,制作了最高温度可达130℃的高温老化箱及绝对光电编码器老化工装,见下图。考虑到执行机构在使用现场任意位置安装,绝对光电编码器老化工装设计为可以满足绝对光电编码器侧装(输入齿轮在上)、侧装(输入齿轮在上)、正装、倒装四种测试工位,高温电机通过变频调速后带动绝对光电编码器依照设置速度运行,在控制界面可以实时监控每台被测绝对光电编码器的码值跳变情况,并带有停转报警及码值跳变报警功能。测试验证时,将200台绝对光电编码器安装在老化工装的四种工位上,置于高温老化箱中,分别在20℃常温、85℃高温下,模拟绝对光电编码器在执行机构上的实际寿命进行长期性能测试。验证结果表明:在高低温环境中,每个安装工位上的绝对编码器在均能在设计寿命期内正常运行,无机械卡死或者码值跳变,验证了产品的可靠性。


高温老化箱 绝对光电编码器老化工装
l 手电动切换系统可靠性设计
手电动切换功能是电动执行机构的一项重要功能,可以实现手动和电动力矩的双输入。许多电动执行机构,在手动和电动切换过程中,多是纯机械切换方式,经常出现不能切到手动或者手动后无法进入电动的现象。由于切换原理决定了蜗轮轴及手轮的浮动支撑,还经常造成漏油及手轮卡死情况,导致生产中出现紧急情况时无法实现手动操作,出现生产事故。为了实现手电动切换功能,且避免上述情况的出现,在设计阶段对手电动切换技术进行了研究(申请专利2项【5-6】)。S系列多回转电动执行机构最终采用其中的一种手电动切换技术,采用机电结合的方式:即当手轮推进时,通过电磁感应先自动切断执行机构内部对电机的供电,然后手轮与蜗杆通过花键啮合,进入手动状态;当松开手轮时,手轮自动弹回,电机电源接通,延时2秒进入电动状态,保护操作者安全。为了确保手电动切换的灵敏有效,还对感应零件的感应距离做了上千次的配对验证测试,并预留了安全操作距离。这种手电动切换系统有效解决了手轮卡死、切换不畅及漏油问题,手电动切换及时,保证手动操作安全,提高了切换的安全性及可靠性。
l 电机及其正反转控制系统
电机是电动执行机构正常工作时的动力源,阀门的开关也需要通过其正反转来实现,而正反转模块是控制电机正反转的重要零部件。当执行机构频繁调节时,需要正反转模块控制着电机不停的正反转运行,模块会产生大量的热,导致模块的温度由于无法及时散热而急剧升高,严重时甚至会爆炸,尤其是电动执行机构在高温环境中运行时,隐患更大。科远股份的研发人员针对散热问题,通过多次变更工艺及测试,最终找到合适的散热板材及处理工艺,使得调节型电动执行机构每小时启动1200次,最高温度不超过70℃。为了验证正反转模块在高温环境中的可靠性,将该模块安装在电流最大的SY040-B规格产品上,放置于高温老化箱中,在85℃温度下,每小时运行1200次,模拟执行机构的使用环境及使用条件,进行长期性测试,结果表明在超过其设计寿命后,依旧可以正常运行。
l 密封设计及IP68测试验证
电动执行机构工作环境恶劣,粉尘较多,有时候直接在室外露天安装,一旦粉尘或者雨水进入内部,对于既有弱电控制、又有强电驱动的执行机构来说将是致命的。因此执行机构不但需要防止润滑油从内部漏出来,而且还要防止雨水进入执行机构内部,一般密封性能需要达到IP67或者IP68。S系列多回转执行机构为了防止减速箱润滑油渗漏,除了采用密封性能较好的骨架油封和O型圈外,还在密封面处涂抹一种特殊的润滑脂,当骨架油封或者O型圈密封失效时,润滑脂可以阻断渗漏通道,起到二次密封作用。为了防止雨水进入电气腔,接线腔与电气腔之间采用二级密封,直接将电气腔与外部完全隔绝,即便接线腔在现场接线后密封不到位,也不会造成电气腔进水。
为了进一步验证产品可靠性,设计制作了两台IP68测试平台:一台深度1m、普通压力测试水箱,用于测试普通水深情况下电动执行机构长期运行的防水及漏油情况;一台深度1m、2MPa压力(即加压情况下相当于20m水深的压强)测试水箱,用于测试20m水深情况下电动执行机构长期运行的防水及漏油情况。经过测试,B系列电动执行机构满足IP68要求,没有出现进水和漏油现象,验证了产品密封性能的可靠性。


l 整机长期稳定性测试验证

上述关键零部件的可靠性设计是整机稳定可靠的前提,但作为机电一体化产品,电动执行机构融合了各个零部件后,其整机运行的稳定性是否达到设计要求仍需要测试验证。为了测试整机的长期稳定性,设计制作了5台长期老化测试工装;每台工装均可以同时满足电动执行机构正装、倒装、侧装三种位置,模拟了执行机构的实际使用现场的安装工位。每款产品量产前,均进行了批量的验证,保证其在2倍以上设计寿命期内不出现任何异常才发布生产。在量产过程中,所有规格产品会依照每100台里面随机抽取4台的频次,进行长期稳定性测试,若有异常,则会及时发现问题并进行批量解决,确保出厂产品性能稳定可靠。
结语
由于电动执行机构在火电、化工等领域应用场合的特殊性及产生故障时的危害性,其性能稳定及质量可靠显得尤为重要。S系列电动执行机构无论是在设计阶段的理论分析,还是测试阶段的大量测试验证,都是为了确保设计产品的可靠性,保证每台出厂产品性能的稳定性。
科学求实,精诚致远,是科远股份的企业精神,而这种精神在科远股份电动执行机构产品的研发、测试和生产中得到了很好的体现。质量是产品最好的广告,产品的可靠性将成为我们持续的追求。
相关文献
[1] 《电动执行机构的高效率传动设计》作者:贺赟晖,王成,王威,禹建勇——《机械传动》2012.36(11)P70-73.
[2] 《S2工作制下的ZI型蜗杆减速器热计算》作者:王成,贺赟晖,禹建勇——《机械传动》2013.37(3)P74-75.
[3] 《电动执行机构蜗杆传动支承设计及转速对强度的影响》作者:贺赟晖,禹建勇,王成——《机械传动》2014.38(11)P72-75
相关专利
[1] 专利名称:一种扭矩测试装置 发明人:王成,贺赟晖 申请号:CN201210443506.0.
[2] 专利名称:一种用于精密光电传感器的塑料齿轮的抗变形热处理方法 发明人:刘国耀,禹建勇,王成等 申请号:CN201410787562.5.
[3] 专利名称:一种传感器采集处理方法 发明人:胡歙眉,徐艳超,王成 申请号:CN201410785788.1.
[4] 专利名称:一种传感器采集处理电路 发明人:刘国耀,褚裕海,王成等 申请号:CN201520026470.5.
[5] 专利名称:一种电动执行机构的手轮切换装置发明人:王成,贺赟晖,王威等 申请号:CN201220585814.2.
[6] 专利名称:一种手电动切换装置及电动执行机构》发明人:王成,禹建勇,徐航等 申请号:CN201420008373.9.




 投诉建议
投诉建议
提交
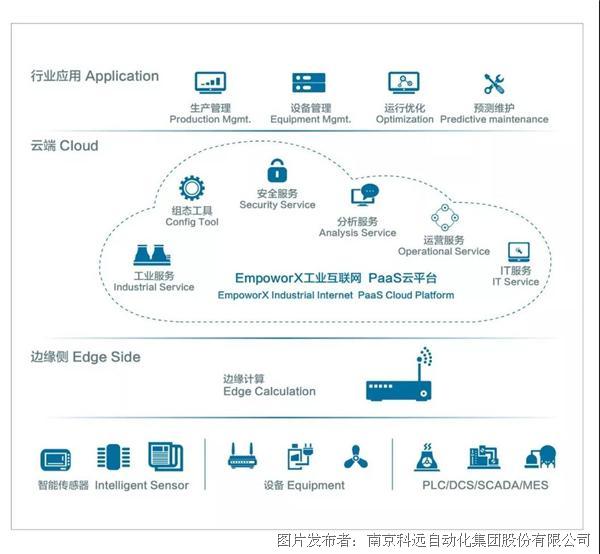
科远EmpoworX工业互联网平台

管窥工业互联背景下的智慧环卫建设
工业互联,开启“智慧水务”新时代

科远 MES制造执行系统
科远股份制造执行系统(MES) 迈向工业4.0时代的助推器