


伺服电机控制系统设计
1.SIMODRIVEPOSMOA电机 SIMODRIVEPOSMOA是一种带有集成式变频器、定位控制器、可选变速箱以及PROFIBUS-DP通讯功能的智能电机。其驱动单元通过PROFIBUSDP进行通讯,因此可同时运行几个驱动系统。对于大型设备的安装,采用直线电源总线和通讯总线结构,可以显著减少所需电缆数量。另外,简单的连接器系统可保证在安装和维修方面节约大量成本。在SIMODRIVEPOSMOA中,借助于SimoComA可以最多编程27个进给程序段。在编程之后,进给程序可以通过任何具有PROFIBUS能力的PLC启动,并且还可以进行编辑。其主要特点有: (1)通过通讯总线和电源总线的有机统一,简化了机械结构。 (2)通过简单的通讯接口,即可集成在任何PROFIBUS-DP环境中。 (3)用户友好的功能块简化了使用STEP7在SIMATIC环境中的配置,只需提供GSD文件便可以作为从站。 (4)带有集成PROFIBUS地址开关和终端电阻的插入式连接盖,接线更换方便。 (5)可以通过PROFIBUS-DP和指示灯进行故障诊断。 (6)使用SIMATICTeleservice和路由以及通过DRIVEES进行工程调试和远程诊断。符合全集成自动化理念,即联合通讯、配置和数据管理。 (7)采用SimoComA,一种直观用户友好的调试工具,系统调试极其容易。 2.现场总线PROFIBUS-DP PROFIBUS-DP是经过优化的高速、廉价的通信连接,专为自动控制系统和分布式I/O站以及现场设备之间的通信而设计,使用PROFIBUS-DP模块可取代价格昂贵的24V或0到20mA并行信号线。用于分布式控制系统的高速数据传输,其主要特点是最小化的响应时间,高抗干扰性。 PROFIBUS-DP使用物理层和数据链路层,这种精简的结构保证了数据的高速传输,特别适合PLC与现场分散的I/O设备之间的通信。直接数据链路映像程序DDLM提供对数据链路层的访问。用户接口规定了设备的应用功能、PROFIBUS-DP系统和设备的行为特性。PROFIBUS-DP特别适合于PLC主站与从站之间的主从方式,以及这两种方式的混合。 PROFIBUS-DP用于设备级的高速数据传送,中央控制器通过高速串行线同分散的现场设备进行通信,多数数据交换是周期性的,除此之外,智能化现场设备还需要非周期性通信,以进行配置、诊断和报警处理。 中央控制器周期地读取从设备的输入信息并周期地向从设备发送输出信息,总线循环时间必须要比中央控制器的程序循环时间短。除周期性用户数据传输外,PROFIBUS-DP还提供了强有力的诊断、保护、组态和配置功能,数据通信是由主站和从站进行监控的,具有同步和锁定功能。主站和从站的数据分三个阶段:参数化、组态和数据交换进行周期化传送。 3.控制系统组成 (1)组态主站和从站 组态过程中应注意组态主站应该与实际硬件型号完全一致,否则造成PLC系统内部错误,组态站地址应与POSMOA中拨号开关设定从站地址相同,POSMOA的DP地址通过内置的拨号开关来设定,其最高位为终端电阻。
(2)程序编写 1.建立数据块DB1,将数据块中的数据地址与从站中的PZD、PKW数据相对应。 2.在OB1中调用SFC14和SFC15,完成从站数据的读写。周期性通信通过调用SFC1 3、SFC15直接访问PKW和PZD,数据交换快,实时性好。可以直接通过PROFIBUS-DP对电机进行实时控制,监控电机速度和位置。表1即为POSMOA的固定的报文结构: POSMOA的固定的报文结构 4.对PZD的读写,通过PZD输出命令到从站控制电机的起动、停止及传输块的执行,读取PZD输入命令监控从站的工作状态,还可以通过触发传输块进行精确定位,此过程中严格按照控制字的功能发送基本控制信号。例如点动1时将453F送到PZD1即可,PZD2的高位为块选择数值,下表2即为控制字各位的说明:
表3:状态字 5.对PKW的读写,通过PKW设置或读取重要参数。 PKW一般为4个字,分别为PKE(参数表示符)、IND(参数从索引)、PWE(参数值高位)、PWE(参数值低位)。 ①SFC15用于将数据写入PROFIBUS从站 将DB1.DBX12.0开始的连续4个字写入从站,向从站发送读(写)参数请求。 DB1.DBW12—→PKE_W1 DB1.DBW14—→IND_W1 ②SFC14用于读PROFIBUS从站的数据,读取所需要的重要参数 PKE_R1—→DB1.DBW0 IND_R1—→DB1.DBW2 PWE1_R1—→DB1.DBW4 |









 投诉建议
投诉建议
提交
希斯机床(SCHIESS)×积木易搭:产品3D建模+品牌3D虚拟展厅,为机床营销注入新活力
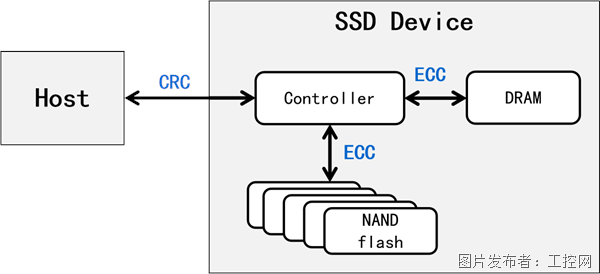
TB级训练如何规避静默错误?E2E端到端保障数据‘零差错’!

储能电站响应虚拟电厂负荷调度,CET中电技术光储EMS系统助力深圳满纷天地“削峰填谷”

飞腾助力“疆电入渝”首批机组投产发电

盐湖提锂“淘金记”:维谛技术(Vertiv)让“白色宝藏”变身新能源“血液”