


QMP运动控制卡的IPMSM对拖平台简介
2018/2/7 16:49:31
系统硬件由带MechaWare工具软件功能的QMP-synqNet-pci运动控制卡和科尔摩根AKD伺服驱动器驱动的内嵌式永磁同步电机(IPMSM)对拖平台构成。



特点:
QMP控制卡通过SynqNet总线接口提供给驱动和 I/O 模块的高速同步网络连接。
运动控制为实时64位浮点控制(双精度) - MPC8245 PowerPC/ 133 MHz存储器。支持最多32个紧密协调的坐标轴。 伺服更新速率: 4轴:24kHz;8轴,16kHz。 MPI(C/C++)编程库,可通过Microsoft Visual Stdio 等集成开发环境很方便的编写应用程序。
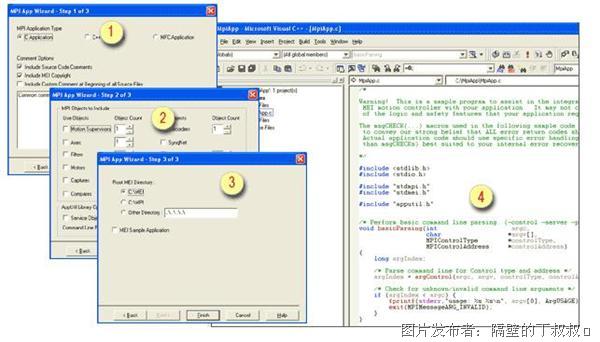
通过适合创建定制控制算法的MechaWare插件程序套件,利用Matlab/Simulink建立控制模型。

支持Windows XP/2000, RTX, VxWorks, Linux 和其他实时操作系统。
执行机构采用内嵌式永磁同步电机(IPMSM)搭建对拖平台。内嵌式永磁同步电机(IPMSM)能够利用由转子磁路不对称产生的磁阻转矩,具有较高的功率密度与动态性能,被广泛应用电动汽车行业。
为实现对内嵌式永磁同步电机控制算法的试验验证,设计一套基于仿真软件Simulink的实验装置。
平台组成:
本实验装置采用与被测电机对拖的方式进行试验。对拖式测试平台主要由四部分组成:两套伺服驱动器和永磁同步电机、控制卡、相关参数的测量装置、转矩转速传感器和工控计算机。
对拖平台测试系统组成见下图
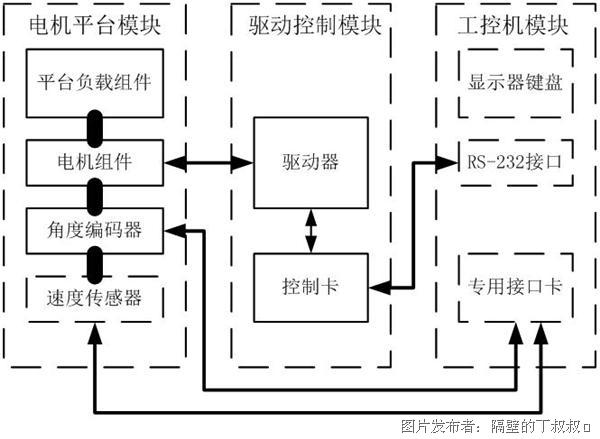
平对拖平台测试系统组成




 投诉建议
投诉建议
提交
查看更多评论
