


机器人安全应用系列(四):压强与力量
人机互动的接触
传统的工业机器人,通常使用安全监控停止以及速度分离监控等手段,从时间和空间两个维度,将操作人员和机器人进行安全隔离。
如果在同一时间和空间内,操作人员与机器人依然具有互动的需求,便可能产生直接的物理接触。
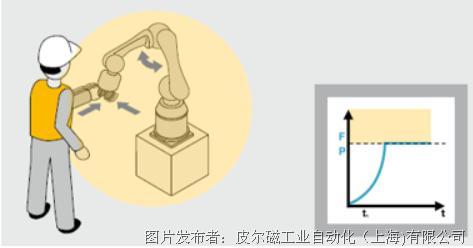
这些物理接触,特别是其中的非预期接触,例如碰撞、冲击、挤压等等,都可能对操作人员产生直接的伤害。

人机互动时可能产生物理接触
物理接触类型
机器人系统的运动部件与人体区域之间可能的接触有两种不同的类型。
- 准静态接触:一般属于夹紧或挤压情况。在这种情况下,机器人系统会对受困身体部位施加一段时间的压力。
- 瞬时接触:这也被称为“动态碰撞”。人的身体部位受到机器人系统的运动部件的冲击,这种类型的实际接触时间短,不会造成身体部位被夹住或俘获。
瞬时接触取决于机器人惯性,人体部位的惯性,以及两者的相对速度的组合。
人机的物理接触
压强与力量限制
人机直接互动中物理接触的安全保护,在ISO/TS 15066中有了全新的定义。
现在通过机器人本质安全的手段,基于安全相关的控制系统,如果能将机器人系统的压强与力量控制在风险评估期间确定的允许范围内,便能实现风险的降低。
ISO/TS 15066基于生物力学的研究和测试结果,根据人体不同的部位,定义了准静态接触和瞬态接触的阈值,提供了机器人制造商与集成商,尤其是协作型机器人供应商一个安全指导纲领。
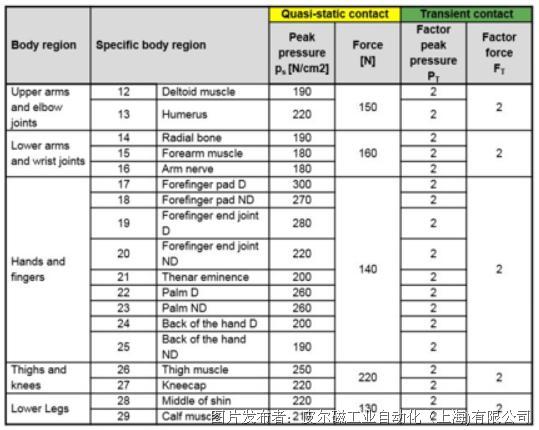
压强与力量限制表
皮尔磁依照ISO/TS 15066标准的身体区域模型,开发了适用于协作型机器人的碰撞测量系统PROBms。
PROBms主要用在验证人机协作时的碰撞极限值,并记录会导致发生潜在碰撞的力和压强:
- 力的测量
碰撞测量装置包括弹簧和传感器,用以测量施加在人体上的力。
九只不同的弹簧分别具有不同的弹性系数,可在力测量中用于模拟各个身体区域。
- 压强的测量
压敏感应纸用于测量局部压强并将其同相关标准中规定的极限值进行比较。
您可使用皮尔磁专属软件工具对力测量值进行评估和数字化处理,并生成报告,简单便捷。
特性一览:
1,对压强与力量的测量符合行业标准
2,产品小巧轻便,使用简单
3,用于简化评估、可视化和记录的软件
4,长效使用寿命
5,可根据环境条件灵活调整
6,标准化测量方法




 投诉建议
投诉建议
提交

皮尔磁:从安全立法新规聊企业应对之策

皮尔磁:工业网络安全的新盾牌

皮尔磁荣获“德国工业之最”称号

皮尔磁:为包装行业提供全面支持

皮尔磁:全力以赴确保安全