


【控制技术】GMC-通用运动控制的典范
经过40多年的技术革新,CNC术语已经等同于高精度机床。数控机床的主要用途是保证加工的精度。同时,在使用PLC时还需要设备达到更快的响应。
工业机器人越来越多用在生产机器的大范围任务中。它们应用的范围从简单的操作任务到像焊接这样复杂的运动。机器人技术主要关注的不再是几何路径的结合。相反地,它的决定因素变成了重复运动的精度和动态特性。
随着各个行业自动化的不断深入,以及每个机器生产线愈加复杂的控制任务,这让以前传统的CNC的概念变得模糊起来。
设备生产商要的不只是控制器;他们关注的是整个自动化设备。包括:驱动,运动和路径控制器,显示和通信网络。带CNC功能的路径控制器是自动化系统的一个重要组成部分。
贝加莱将所有部件集成到一个独立的系统中。软CNC嵌入在PLC的实时操作系统中。这样,便满足了大部分复杂工作的要求。
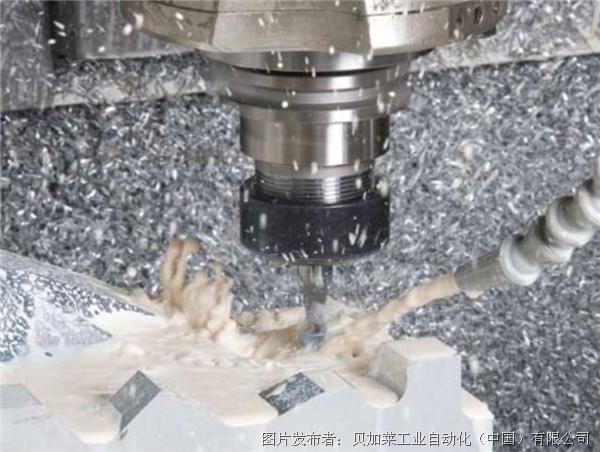
软CNC已应用于各类传统磨床,比如:制作门窗框架的加工中心,激光/等离子/水刀切割,玻璃加工,焊锡设备和封装机。
◀灵活的解决方案▶
我们的解决方案为什么要如此的多样化呢?首先,实时的操作系统为高精度的定位任务创造了良好的环境。400us的时间周期允许CNC在微小范围划出精确的路径。通过Ethernet POWLINK可以确保无抖动的将设定点转移到正在运转的电机中。另外,此系统可以无限添加I/O点。
基于灵活的系统结构和大量的功能块,可以为客户量身定制专门的产品线。另一个关键是自动化解决方案可以封装在应用层而不是直接装在CNC核心部件,这样,这套方案对其他生产商也适用。
软CNC包含广泛而系统的功能块。依照DIN 66025标准,可编写部分程序和运动控制。将主程序和子程序分开可以使NC程序管理明晰化。常用的功能块也可以添加到基本的功能块中。当需要扩展功能块时,编程环境支持高级语言,比如:循环语句,条件语句,选择语句。通过这个强大的界面,在PLC中进行应用程序的数据交换。执行各种功能块来实现实时控制。在执行程序时,可以改变工具的半径或路径端点等数据,保持特定数据与路径的同步。
◀动态特性▶
当在一定的技术领域使用路径控制时,影响路径动态特性(比如:路径速度、加速度和迟滞等特性)是至关重要的。对于特定的应用,在系统运行中改变动态特性或根据路径半径、曲率自动调整动态特性都是非常必要的。
额外的功能会在切割直径补偿中找到。无效的交叉点,凹槽和峰值在通路上不需要断点,这个功能如果用在等离子切割机上不会损害工作台,相反还会根据客户的要求自动纠错。
集成“前视”功能保证了路径速度的最优化。尤其是机器在指定的路径中频繁的加速时显得尤为重要,“前视”功能可以避免设备的震动。
◀校正误差▶
有时候为了提高加工精准,我们需要跳过一些固有定律。在一些特定的环境中,我们通过提高动态轴的限定值来达到更好的效果。让我们来看以下例子。在切割过程中,刀具可以自动沿着路径的切线运行。当在两个路径之间转换时,刀具会以超过特定的速度运行,这样刀具不能很快的被调准运行。为了保持在限定值内,路径实际运行速度要降低。然而,速度的降低会极大影响刀具的切割质量。因此,提高动态轴的限定值要优于降低刀具速度的效果,它基本不会对切割质量造成影响。
其他有益的功能块包括3D工作平台的自由旋转和机械轴的倾斜纠正。当然,也可以校正工具来补偿无级工作平台。
倾斜纠正对于机械上无法使坐标轴保持垂直或者很难保持垂直时非常有用,软CNC会影响部分程序因此实际路径和理想路径不一致。
软CNC在水平坐标轴上具有纠错功能。这包括主轴轮廓错误和背隙补偿。这些功能块可以控制精确的运动路径。
◀不只是CNC▶
所有这些功能块不只局限于CNC区域的应用。如上所述,越来越多的设备上配有功能块或工业机器人,以实现比如放置或移动工作台的任务。
因此,使用同类系统控制整个自动化流程的方案不再是梦想,软CNC的接口可以被系统识别。这里有两个特别相关的转换功能块。第一个是反向运动或反向转换,第二个是直线运动或正向变换。
贝加莱研发的软CNC与传统的CNC系统不同,不同点在于软件CNC将所有组件集成到一个系统中,软CNC是嵌入在PCC的操作系统中,这样满足了大量复杂控制的要求。
利用正向变换功能,空间的位置点可以通过机器人的关节角来计算。反向转换是其相反数,或基于空间位置的结合点来计算。
这个原理利用了数控系统控制机器人的优势特点。软CNC的这个特点可以大量应用。比如:如果用一系列简单的直线来代替自由的曲线,集成的“前视”功能则保证了路径速度的最优化。
此结构非常适合对路径精度要求很高的应用,但是也适用于简单的点对点的运动。多种控制步骤由操作员来控制执行。机器人内含存储条。它会按照存储条中设定的程序路径和位置执行。
软CNC支持6轴机器人和SCARA系统的转换功能。这样,编程就可以在CNC系统中进行;然而,6轴机器人对其姿势的描述有特殊的意义。可以用X,Y,Z来描述空间位置,也可以用A,B,C来定义趋向(比如:像欧拉角)。将来,也会有其他的程序可以控制机器人的运动。
这个理念已经开启创新的运动控制方案之门。
关于贝加莱
微信号:br-automation(←长按复制)
贝加莱是一个总部位于奥地利并拥有遍布全球分支机构的创新驱动型自动化企业,2017年7月,贝加莱成为ABB集团的一个业务单元。作为全球工业自动化领域的领导者,贝加莱融合了前沿技术与先进的工程能力,为各个产业客户提供机器与工厂自动化、运动控制、HMI以及集成安全技术的完整解决方案。通过工业物联网通信标准如OPC UA、POWERLINK和openSAFETY以及贝加莱强大的Automation Studio软件开发环境,贝加莱不断重新定义自动化工程的未来。贝加莱保持持续的创新精神,为客户提供更为简化以及超出预期的工业自动化领域前沿技术与方案。





 投诉建议
投诉建议
提交
ACOPOS 6D-装配生产新模式
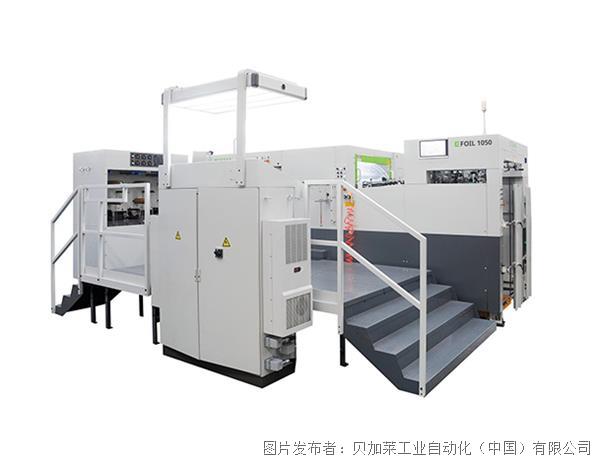
高品质烫金烫出金字招牌

机器制造商:软件视角的系统选择策略
一个软件,多种机型-称重软件整体规划提升出机效率
世界级的采煤装备-来自贝加莱的支持