


机器人冲压自动化生产线解析
汽车车身钣金件冲压线是汽车生产过程中的重要设备, 其生产质量和效率直接影响到汽车的质量和生产效率。冲压生产自动化是提高劳动生产率和改善劳动条件的有效措施和主要方法。随着我国汽车、电器产品质量的不断提高和生产规模的不断扩大, 我国金属冲压行业实现生产自动化势在必行。

冲压工艺中的生产方式有传统的人工生产方式( 如图 1 所示) 与自动化生产方式( 如图 2 与图 3 所示) 。从产品质量的稳定性、人员劳动强度、安全生产、生产效率各方面进行比较, 自动化生产方式有较大优势, 也是冲压生产方式的发展趋势。冲压自动化生产线又分为机械手自动化生产线、机器人自动化生产线和多工位压力机生产线等方式。
1. 各种生产方式的比较

机械手自动化生产线和机器人自动化生产线的区别主要表现在以下几个方面。
安装方式: 机器人线在地面安装, 与压力机没有机械上的连接; 机械手线在压力机立柱间安装钢梁, 附着在压力机上。
使用特点:机器人线通过端拾器的切换和机器人动作轨迹的调整, 更加柔性化。
生产节拍:机器人线生产节拍为7 件/ min~10 件/ min, 机械手线为8件/ min~12 件/ min。
投资成本:机器人线投资低, 机械手线投资高。因为生产节拍是一个综合指标, 它不仅取决于某一设备, 而且取决于自动化设备、压力机、模具 3 者的协调匹配关系, 如达到10 件/ min以上, 对压力机和模具的要求就相应提高, 意味着投资增加。综合考虑, 使用机器人自动化线更加经济、适用。
机械手自动化线适于大间距的压力机生产线, 同时适用于已有生产线的自动化改造。通过更换端拾器, 机器人自动化生产线可适合多车型的生产, 柔性更高。
2. 机器人冲压自动化生产线设计
机器人自动化冲压生产线运行循环方式为: 垛料拆垛( 机器人拆垛) - 板料传输- 板料涂油- 板料对中- 上料机器人送料- ( 首台压机冲压) - 下料机器人取料、送料- ( 压机冲压) - ( 根据工序数量循环) - 下料机器人取料、送料- ( 末端压机冲压) - 线尾机器人取料、放料- 皮带机输送- 人工码垛。本文以长城汽车的机器人冲压自动化生产线为例对其整体布局、电器控制等进行具体设计。
2.1 系统组成
本系统包括拆垛系统、涂油机、对中台、压力机兼上下料系统、线尾输送系系统。
拆垛系统采用可循环式双垛料台, 导轨布置平行于压力机, 冲压板料用行车或叉车放置在非工作垛料台上, 然后通过有效信号确认上料完毕, 系统将在一台拆垛完成后自动转换垛料台, 保证连续生产; 在垛料车上配备磁力分张器, 通过磁力将垛料自动拆垛成单张。在拆垛机器人上有双料检测以及双料处理装置以保证每次为单张送料。拆垛机器人将板料放置在长度可调的磁性传送带上, 板料送至涂油机, 板料是否涂油及涂油位置可通过编程自行设定, 板料涂油后, 传送到对中台。对中台采用机械对中台, 可方便地进行移动和固定, 同时使用重力对中或视觉对中系统, 保证板料的重复定位快捷、准确与牢固; 上料机器人根据每个零件的对中位置, 改变运行轨迹, 将板料准确地搬运到压力机内; 对不同的冲压制件进行机器人的模拟示教,离线编程, 以适应多种制件的共线生产; 线尾输送采用皮带机, 在生产线的末端放置皮带机, 保证最后一台压力机的机器人直接将零件放置到皮带机上, 达到出件效果。通过软件使机器人跟踪压机的运动, 实现压机与机器人同步功能, 可以最大化上下料与压机运动之间的重合度, 达到平稳切换其速度来缩短生产节拍及减少机械负荷的目的。通过增加外部轴, 做为机器人的第七轴进行伺服控制, 使压力机间的间距布置更加自由; 同时, 机器人的传送范围和搬运速度得到提升, 生产节拍更快。
2. 2 控制系统
2. 2. 1 总体控制方案
本系统包括拆垛机、涂油机、对中台、上下料系统、线尾输送系统, 各分系统间的电气控制按照集中监控、分散控制的原则。在各控制部分控制系统中, 采用设备层和控制层的典型控制模式, 每个层次中使用不同的网络结构及软硬件配置,以实现各自不同的功能。
2. 2. 2 控制层
各部分控制系统采用具有现场总线形式的 PLC控制方式, 具有单独控制及连线自动控制的功能。为保证系统稳定可靠地运行, 可采用西门子 S7- 416-2DP 的PLC, 现场总线采用西门子Profibus 总线及工业以太网控制系统。每个控制部分的 PLC 之间及各PLC 与上位机之间的数据交换采用工业以太网方式,供 监 控系统联网 使用。压力机控 制系统需配 备Ethernet card 与机器人控制系统接口, 控制系统与机器人系统间通过 Profibus- DP 现场总线形式实现信息交换和连锁对接。
2. 2. 3 设备层
设备层在整个控制系统中处于最底层, 是整个控制系统的关键环节, 主要包括现场操作站、现场设备检测单元( 如接近开关、光电开关) 、现场其他输入设备、现场执行机构( 如电动机、电磁阀) 等, 直接或通过现场总线与控制层中的 PLC 相联系, 将输入信号发送给 PLC, 并将 PLC 输出指令发送到现场设备。各种传感器和阀的接线盒通过现场总线( Profibus- DP) 和相应控制单元通讯。
2. 2. 4 人机界面 HMI
本系统 HMI 采用 SIEMENS 的触摸屏, 在每个控制单元均配置一个触摸屏, 采用 Profibus 总线通讯。单元触摸屏具有指示灯及操作按钮( 或旋钮) , 可显示错误报警及自诊断等信息, 本单元相关的 I/ O 信号在HMI 上显示, 并以不同颜色区分。一旦有故障节点, 系统将持续报警, HMI 上将在当前画面显示故障点, 以便工作人员查找。
2. 3 安全系统
安全是自动化生产线的最大特点, 本系统采用基于德国 PILZ 安全 PLC 的 SafetyBus 保护系统, 并配置了完善的安全装置, 实时控制显示安全区域状况, 及时发出声光报警信号或停机, 与主PLC 系统通讯采用Profibus- DP 总线。声光报警单元作为整线安全系统的辅助工具, 能够在设备启停、设备故障、上下料故障以及安全系统中各安全监控点报警等异常状况发生时及时通知操作人员处理。在拆垛系统前设有一升降门, 该门为卷帘门。升降门的开闭与两个垛料台的转换互锁, 当一个垛料台无料时, 另一个垛料台进入前, 升降门打开, 垛料台开进; 当前一个垛料台开出后, 升降门落下。升降门是电动升降, 并且由操作员从相应的操作台控制, 在关闭时它们检测 2 个行程开关, 打开时用一个传感器检测。在保证工作单元安全的情况下, 一个光幕单元( 发射器/ 接收器) 允许相关的垛料台车的进出, 也就是说冲压线自动运行。如果相关的垛料台车不是处于过渡阶段, 而是人或者异物阻挡光幕, 这个光幕单元的断开将导致整个冲压线机器人动力的切断( 除了处于编程模式的机器人) , 并且拆垛单元的控制回路电源断开。整个控制系统的所有紧急停止信号以及压机和机器人之间的安全连锁信号都连入安全 PLC 系统, 通过PLC 程序进行互锁控制。
2. 4 仿真模拟
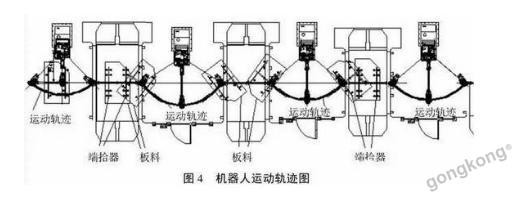
在虚拟环境中仿真冲压线的运行情况, 避免到生产现场才发现诸如干涉、节拍不合理等错误; 通过机器人离线编程, 对机器人的运动轨迹和路线进行模拟,以缩短现场的调试周期。机器人运行轨迹如图 4 所示。
3.结语
机器人冲压加工自动化的应用, 既改善了劳动条件, 减轻了工人劳动强度, 又可确保生产安全, 提高劳动生产率和产品质量, 还能降低能源及原材料消耗,节省辅助加工时间, 降低产品成本。随着生产线的制作、调试周期逐步缩短, 机器人自动化生产线越来越为汽车主机厂所接受, 成为冲压自动化生产线的主流。




 投诉建议
投诉建议
提交

2025中欧绿色建筑工业化论坛9月北京启幕 全球智慧共推建筑产业“双碳”转型

喜讯!华强电子网荣获“2025年中国产业互联网创新企业”

深入实施“人工智能+”行动 浪潮软件集团看好人工智能+工业质检广阔前景,持续布局线缆行业智能质检

海尔新增2家卓越级智能工厂,总数品类行业双第一

深度剖析格力打破磁悬浮压缩机国外垄断,底气来自对自主创新的坚守!