


模具弧度检测-激光轮廓传感器应用实例分析
2018/9/3 10:29:09
模具边缘弧度检测
初步方案及原理说明
检测内容:
模具边缘弧度检测,有无倒角,倒角半径等
检测设备:
LP-S5030
主要性能指标:X方向测量范围0~7mm,Z方向范围0~5mm,精度±3μm,重复精度1μm。
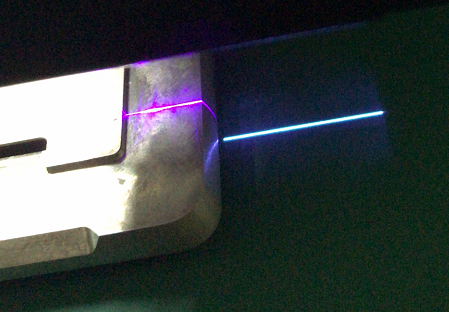
检测原理:
利用激光三角反射原理,激光束被放大成一条激光线投射到被测物体表面上,反射光透过高质量光学系统,投射到成像矩阵上,经计算得到传感器到被测量表面的距离(Z轴)和沿着激光线的位置信息(X轴),移动被测量物体或者轮廓仪探头,就可以得到一组三维测量值。
样品测试情况:

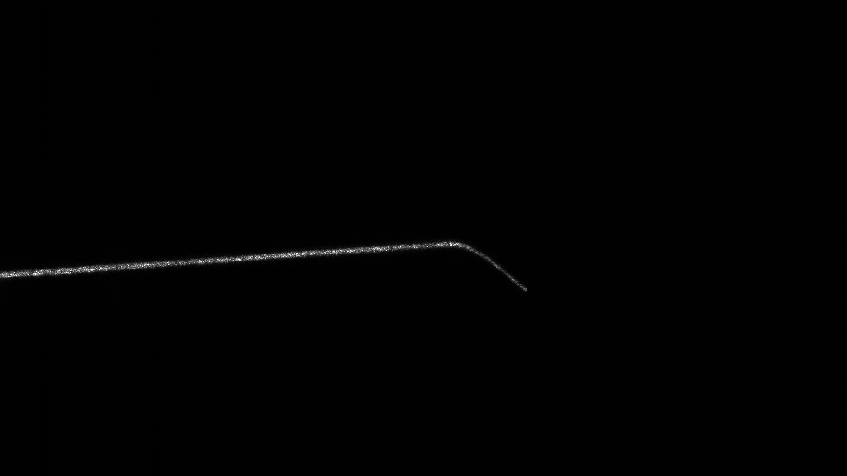
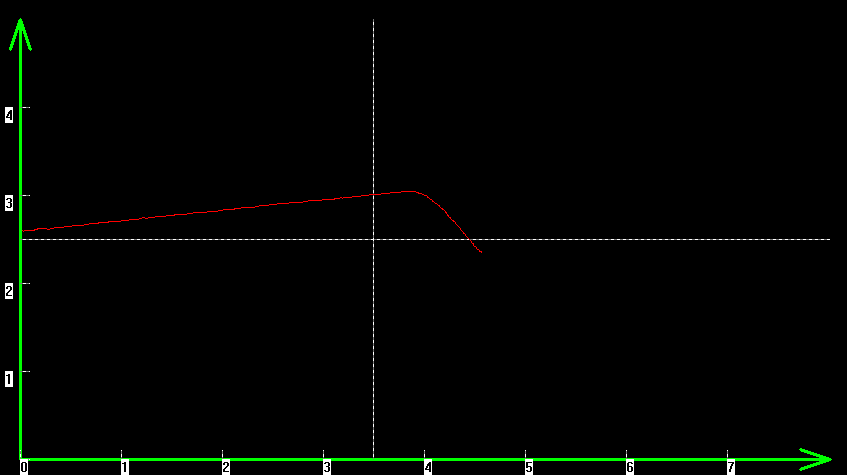
未倒角图像及轮廓:
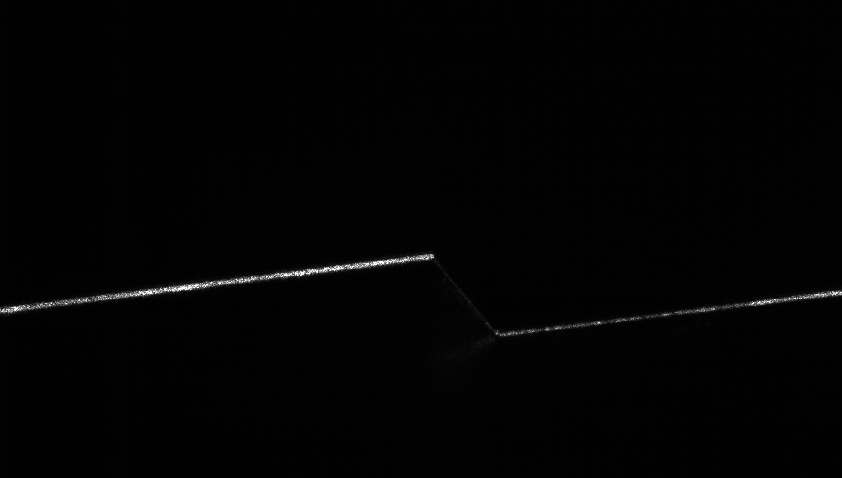
有倒角图像及轮廓:
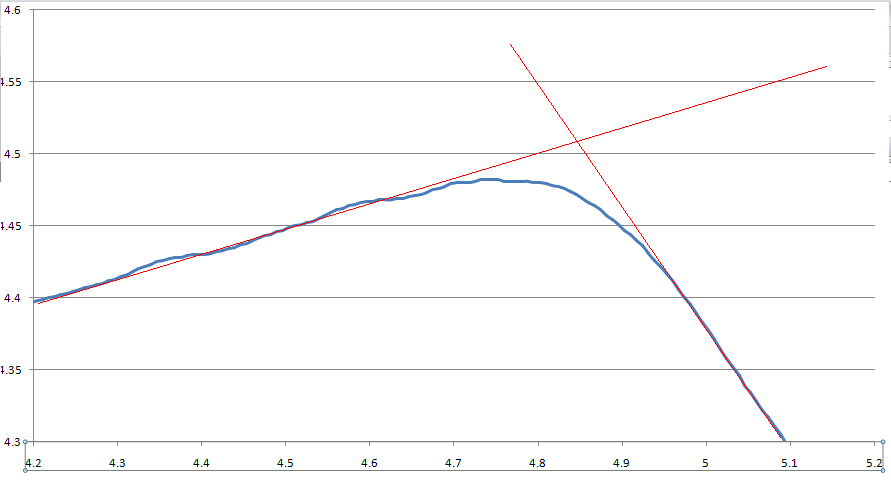
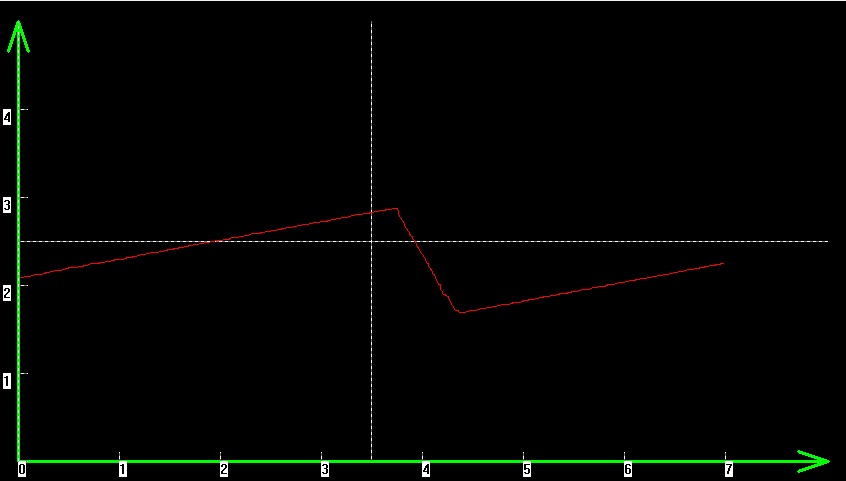
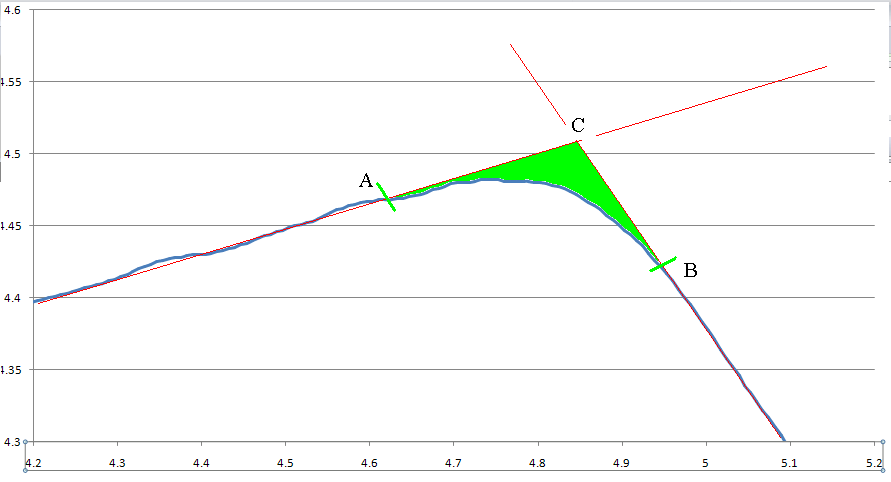
检测方案1:
通过两边拟合出两直线,两条直线的交点为C,并求两直线和轮廓的分离点A,B。通过判断AC和BC的距离,判断倒角情况。
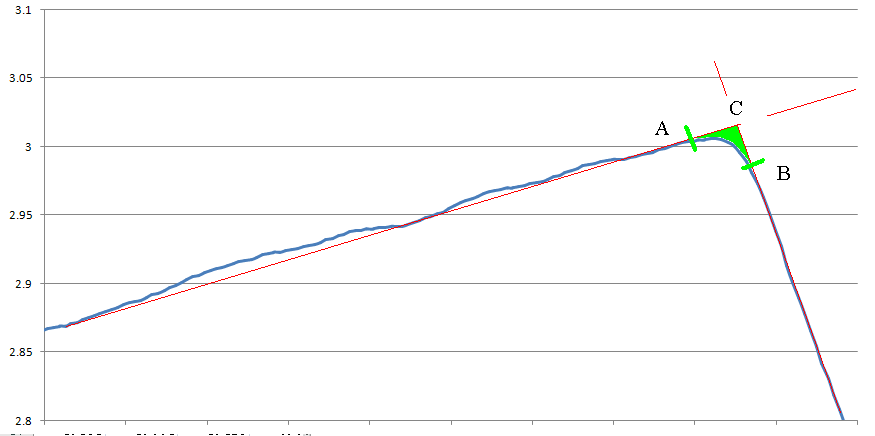
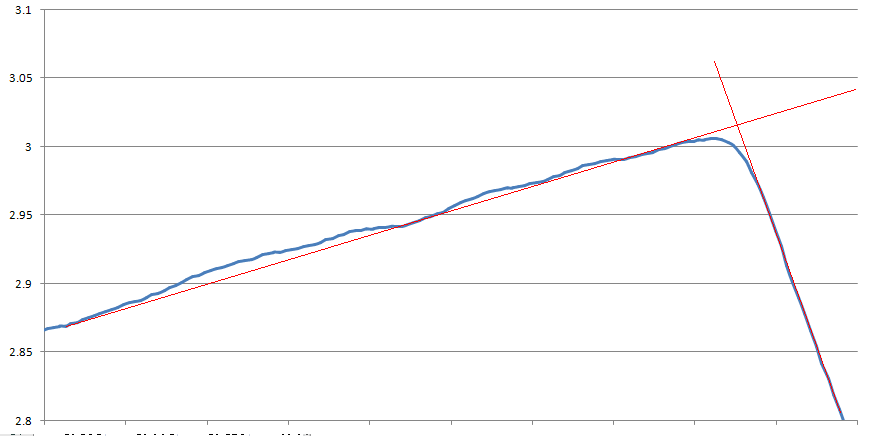
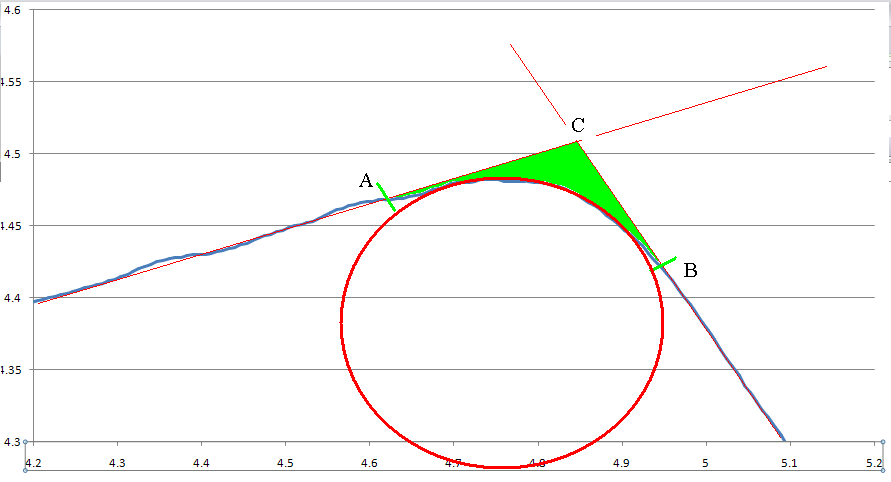
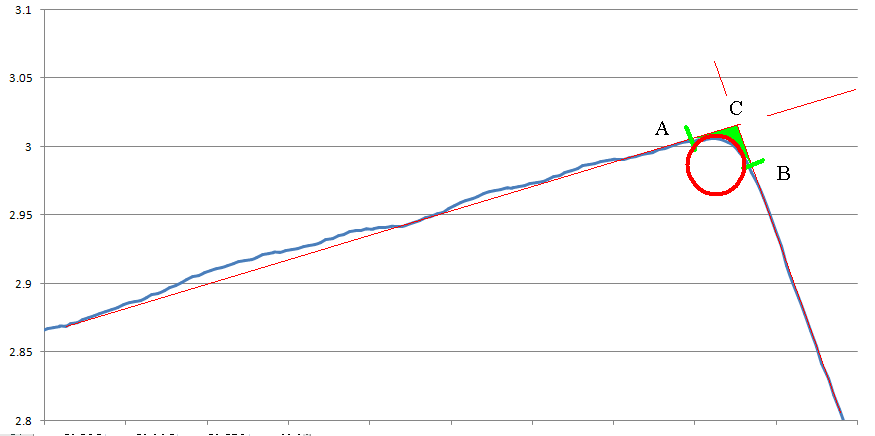
检测方案2:
通过两边拟合出两直线,两条直线的交点为C,并求两直线和轮廓的分离点A,B。在AB区域内求取圆弧的R角拟合的圆的半径,判断倒角情况。(这种方案前提是倒角是圆弧,否则拟合的圆会有误差)
审核编辑(
何为
)




 投诉建议
投诉建议
提交
查看更多评论

其他资讯
激光位移传感器的工作原理