


ABB知识点:运动指令——MoveAbsJ
2018/11/30 16:22:07
一、本节要点
· 掌握MoveAbsJ指令的使用
· 了解robtarget和jointtarget数据的区别
· 了解MoveJ和MoveAbsJ的区别
二、要点解析
1、MoveAbsJ 指令
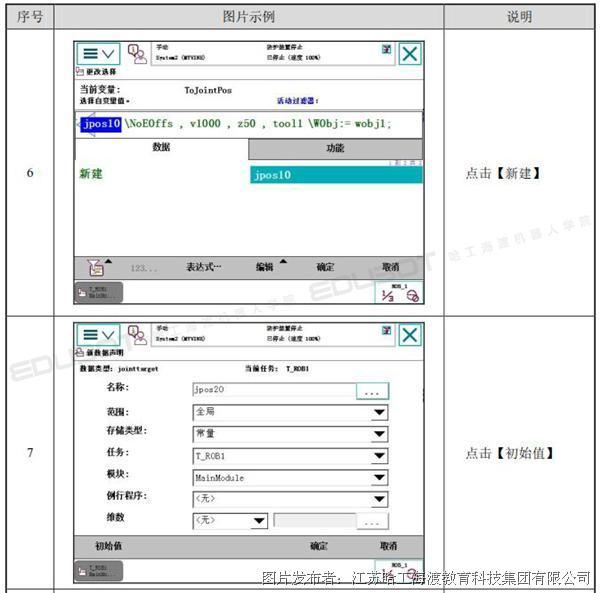
MoveAbsJ 指令:移动机械臂至绝对位置。机器人以单轴运动的方式运动至目标点,不存在死点,运动状态完全不可控制,避免在正常生产中使用此命令。指令中TCP 与 Wobj只与运动速度有关,与运动位置无关。MoveAbsJ 指令常用于检查机器人零点位置,其指令示例如下图所示。

MoveAbsJ 指令示例
①robtarget 和 jointtarget 数据的区别
robtarget:以机器人 TCP 点的位置和姿态记录机器人位置。用于 MoveJ、MoveL、MoveC 指令中。
jointtarget:以机器人各个关节值来记录机器人位置,常用于机器人运动至特定的关节角。用于MoveAbsJ 指令中。
②MoveJ 和 MoveAbsJ 的区别
MoveJ 和 MoveAbsJ 的运动轨迹相同,都是以关节方式运动,所不同的是所采用的数据点类型不同。
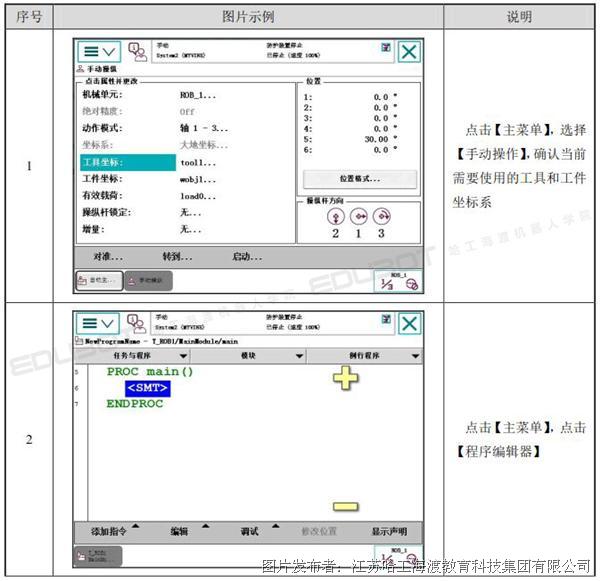
三、操作步骤
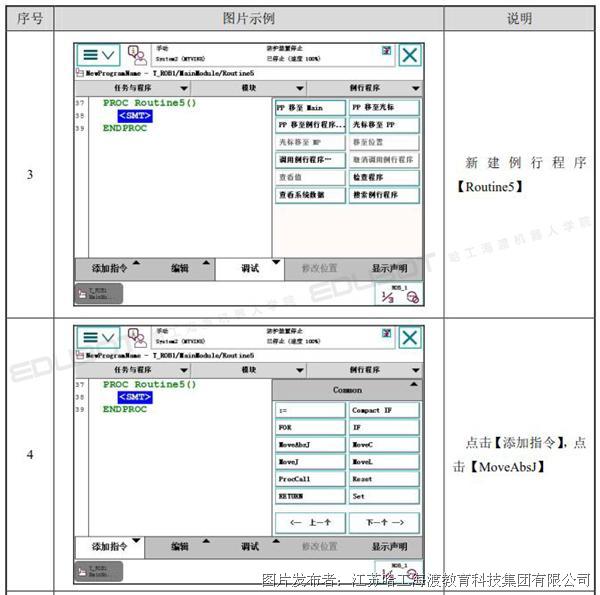
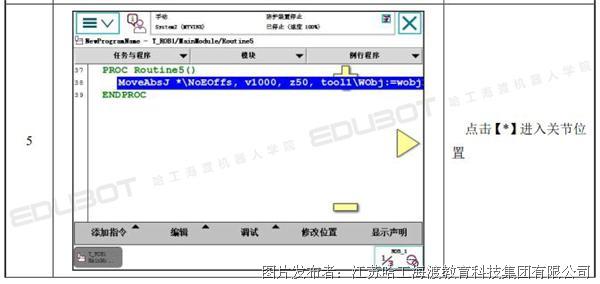
1、程序编写
程序编写的操作步骤见下表。
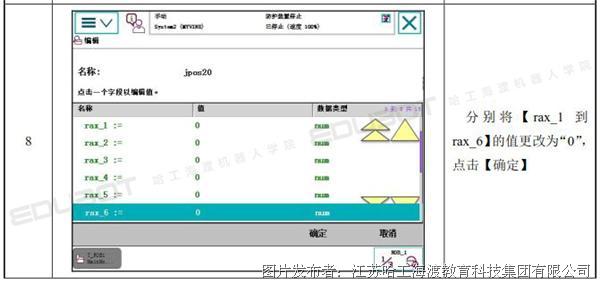

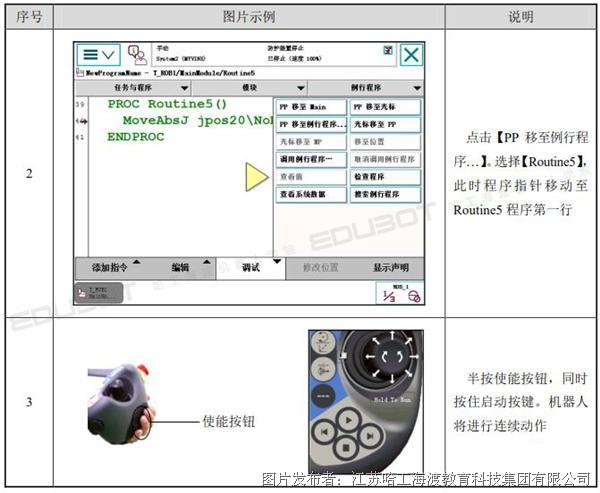
2、程序调试
程序调试的操作步骤见下表。

审核编辑(
王静
)




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

2021年昆山职业技能大赛暨“第五届苏州技能状元大赛”选拔赛

第十一届高技能大赛暨第三届金鸡湖技能邀请赛

海渡集团联手皖西学院共筑校企合作新篇章

苏州工业园区项目制培训—《工业机器人系统操作技术培训》开始招生

工业机器人行业研究:工业自动化+国产替代双轮驱动行业高增长