


ZMC464总线运动控制器硬件手册
ZMC464总线运动控制器硬件手册
Version 1.3
版 权 说 明
本手册版权归深圳市正运动技术有限公司所有,未经正运动公司书面许可,任何人不得翻印、翻译和抄袭本手册中的任何内容。
涉及ZMC控制器软件的详细资料以及每个指令的介绍和例程,请参阅ZBASIC软件手册。
本手册中的信息资料仅供参考。由于改进设计和功能等原因,正运动公司保留对本资料的最终解释权!内容如有更改,恕不另行通知!
调试机器要注意安全!请务必在机器中设计有效的安全保护装置,并在软件中加入出错处理程序,否则所造成的损失,正运动公司没有义务或责任对此负责。
目 录
ZMC464总线运动控制器硬件手册
第一章 控制器简介1
1.1 连接配置1
1.2 安装和编程2
1.3 产品特点2
第二章 硬件描述3
2.1 ZMC464系列型号规格3
2.1.1 订货信息:3
2.2 ZMC464接线4
2.2.1 电源接口:5
2.2.2 通讯接口:5
2.2.3 RS232接口:6
2.2.4 通用输入信号:7
2.2.4.1 输入0-7:7
2.2.4.2 输入8-15:7
2.2.4.3 输入16-23:8
2.2.5 通用输出 :8
2.2.5.1 输出0-7:9
2.2.5.2 输出8-11:9
2.2.6 DA信号9
2.2.7 U盘接口信号:10
2.2.8 轴接口信号:10
2.2.8.1 低速差分脉冲口和编码器接线参考11
2.2.8.2 高速差分脉冲口和编码器接线参考:13
第三章 扩展模块14
3.1 扩展模块CAN总线、输入输出、电源接线参考:14
第四章 常见问题14
第五章 硬件安装16
5.1 ZMC464安装尺寸16
5.2 接线参考16
第一章控制器简介
ZMC是正运动技术推出的网络运动控制器型号简称。
ZMC464总线控制器支持EtherCAT总线连接,支持最快100us的刷新周期(16轴以内),支持最多达64轴运动控制,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等;采用优化的网络通讯协议可以实现实时的运动控制。
单台电脑最多支持达256个ZMC控制器同时链接。
1.1连接配置

典型连接配置图
ZMC运动控制器支持以太网,USB,CAN,485等通讯接口,通过CAN总线可以连接各个扩展模块,从而扩展输入输出点数或运动轴(CAN总线两端需要并接120欧姆的电阻)。
ZMC运动控制器支持U盘保存或读取数据(00x系列除外)。
1.2安装和编程
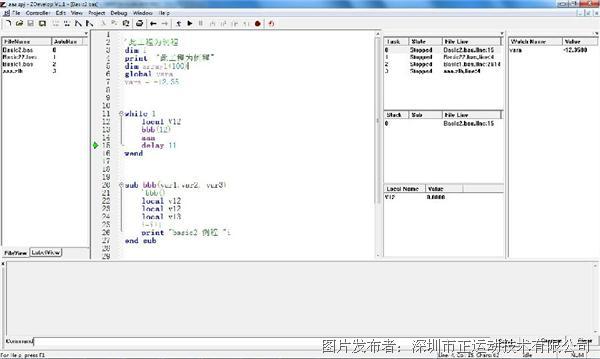
ZDevelop开发环境
ZMC控制器通过ZDevelop开发环境来调试,ZDevelop是一个很方便的编程、编译和调试环境。ZDevelop可以通过串口、485、USB或以太网与控制器建立连接。
应该程序可以使用VC,VB,VS,C++Builder,C#,等软件来开发。调试时可以把ZDevelop软件同时连接到控制器,程序运行时需要动态库zmotion.dll。
1.3产品特点
● 最多达64轴运动控制(3脉冲轴+64ECAT轴)。
● 脉冲轴输出模式:方向/脉冲或双脉冲。
● ECAT最快100us的刷新周期(16轴以内,需特殊版本)。
● 支持编码器位置测量,可以配置为手轮输入模式。
● 每轴最大输出脉冲频率10MHz
● 通过EtherCAT总线,最多可扩展到4096个隔离输入或输出口。
● 轴正负限位信号口/原点信号口可以随意配置为任何输入口。
● 输出口最大输出电流可达300mA,可直接驱动部分电磁阀。
● U盘接口、RS485接口、以太网接口。
● 支持最多达16轴直线插补、任意空间圆弧插补、螺旋插补、样条插补。
● 支持电子凸轮、电子齿轮、位置锁存、同步跟随、虚拟轴等功能。
● 支持硬件比较输出(HW_PSWITCH2),硬件定时器,运动中精准输出。
● 支持脉冲闭环,螺距补偿等功能。
● 支持ZBasic多文件多任务编程。
● 多种程序加密手段,保护客户的知识产权。
● 掉电检测,掉电存储。
第二章硬件描述
2.1ZMC464系列型号规格
| ZMC464 | ZMC464-16 | ZMC464-32 |
基本轴数 | 64 | 16 | 32 |
最多扩展轴数 | 64 | 32 | 64 |
基本轴类型 | ECAT基本轴数, 加3脉冲输出/编码器轴。 | ||
内部IO数 | 24进12出(带过流保护), 另外每脉冲轴有1进1出. | ||
最多扩展IO数 | 512进512出 | ||
PWM数 | 4(输出频率1M) | ||
内部ADDA数 | 2路DA。(0-10V) | ||
最多扩展AD/DA | 256路AD,128路DA | ||
脉冲位数 | 64 | ||
编码器位数 | 64 | ||
速度加速度位数 | 64 | ||
脉冲最高速率 | 10Mhz | ||
每轴运动缓冲数 | 512 | ||
数组空间 | 320000 | ||
程序空间 | 2000KByte | ||
Flash空间 | 256MByte | ||
电源输入 | 24V直流输入(功耗10W内,不用风扇散热), IO口负载没有计算在内。 | ||
通讯接口 | RS232,RS485,以太网,U盘,CAN, EtherCAT | ||
外形尺寸 | 205*135.25mm | ||
轴678可以配置为编码器,从而映射到轴0-2的编码器。
通用输入输出另外带2个脉冲和2个编码器的功能,通过ATYPE来设置。
ZMC4系列支持正运动XPLC的功能,可以通过网络来做组态显示。
2.1.1订货信息:
型号规格描述
型号 | 规格描述 |
ZMC464 | 64轴,点位,直线,圆弧,电子凸轮,连续轨迹运动,机械手指令。 |
ZMC464-1 | 64轴,点位,电子凸轮 |
ZMC464-32 | 32轴,点位,直线,圆弧,电子凸轮,连续轨迹运动,机械手指令。 |
ZMC464-16 | 16轴,点位,直线,圆弧,电子凸轮,连续轨迹运动,机械手指令。 |
ZMC464-16R | 16轴加上蜘蛛手和6关节机械手指令支持。 |
ZMC464-R | ZMC464加上蜘蛛手和6关节机械手指令支持。 |
2.2ZMC464接线

ZMC464具有64个轴,最多达64个虚拟轴。ZMC464可以通过扩展模块来扩展轴。
ZMC464板上自带24个通用输入口,12个通用输出口(每轴另带1个输入口,1个输出口),2个0-10V DA。
ZMC464带1个RS232串口,1个RS485,1个以太网接口。
ZMC464带一个CAN总线接口,支持通过ZCAN协议来连接扩展模块。
ZMC464带一个U盘接口。
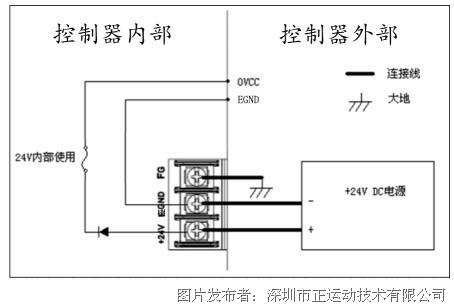
2.2.1电源接口:
针脚号 | 名称 | 说明 |
1 | E+24V | 外部电源24V输入 |
2 | EGND | 外部电源地 |
3 | FG/EARTH | 安规地/屏蔽层 |
ZMC464系列控制器采用单电源供电,ZMC0-2系列和ZIO扩展卡采用双电源供电。
5V轴和编码器接口采用内部电源,IO采用外部电源;ZIO扩展模块扩展出来的轴和编码器采用外部电源。
2.2.2通讯接口:
针脚号 | 名称 | 说明 |
1 | 485B | 485- |
2 | 485A | 485+ |
3 | EGND | 外部电源地 |
4 | CANL | CAN差分数据- |
5 | CANH | CAN差分数据+ |
CAN总线上链接多个控制器时,需要在最两边控制器的CANL与CANH端并接120欧姆的电阻。
ZMC4系列的通讯接口采用外部24V电源,与其他控制器或触摸屏连接时要留意。
CAN总线通讯双方必须保证对应GND连上或是控制器和扩展模块用同一个电源。 ZMC464控制器和扩展模块用不同电源供电时:控制器电源EGND要连接扩展模块电源的GND,否则可能烧坏CAN。
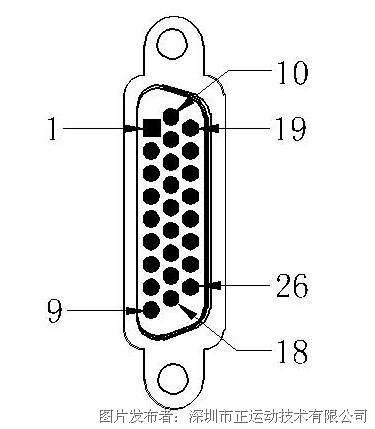
2.2.3RS232接口:

其 9pin 引脚定义如下:
针脚号 | 名称 | 说明 |
2 | RXD | 接收数据引脚 |
3 | TXD | 发送数据引脚 |
5 | EGND | 外部电源地 |
9 | E5V | 外部电源5V输出,可用于对文本屏供 |
与电脑连接需要使用双母头的2.3交叉线。
2.2.4通用输入信号:

每轴信号里面另有1个通用输入口,见轴接口描述.
输入带两个24v编码器,轴号3,4.
2.2.4.1输入0-7:
针脚号 | 名称 | 说明 | 缺省功能 |
1 | EGND | 外部电源地 |
|
2 | EGND | 外部电源地 |
|
3 | IN0 | 输入0 | 锁存A, EA(3) |
4 | IN1 | 输入1 | 锁存B, EB(3) |
5 | IN2 | 输入2 |
|
6 | IN3 | 输入3 |
|
7 | IN4 | 输入4 |
|
8 | IN5 | 输入5 |
|
9 | IN6 | 输入6 |
|
10 | IN7 | 输入7 |
|
输入0与输入1同时具有锁存输入A与锁存输入B的功能。
2.2.4.2输入8-15:
针脚号 | 名称 | 说明 | 缺省或建议功能 |
1 | EGND | 外部电源地 |
|
2 | EGND | 外部电源地 |
|
3 | IN8 | 输入8 |
|
4 | IN9 | 输入9 |
|
5 | IN10 | 输入10 |
|
6 | IN11 | 输入11 |
|
7 | IN12 | 输入12 |
|
8 | IN13 | 输入13 |
|
9 | IN14 | 输入14 |
|
10 | IN15 | 输入15 |
|
2.2.4.3输入16-23:
针脚号 | 名称 | 说明 | 缺省或建议功能 |
1 | EGND | 外部电源地 |
|
2 | EGND | 外部电源地 |
|
3 | IN16 | 输入16 |
|
4 | IN17 | 输入17 |
|
5 | IN18 | 输入18 |
|
6 | IN19 | 输入19 |
|
7 | IN20 | 输入20 | EZ(3) |
8 | IN21 | 输入21 | EA(4) |
9 | IN22 | 输入22 | EB(4) |
10 | IN23 | 输入23 | EZ(4) |
2.2.5通用输出 :

输出电路
每轴信号里面另有1个不带电流放大的通用输出口,见轴接口描述.
2.2.5.1输出0-7:
针脚号 | 名称 | 说明 |
1 | EGND | 外部电源地 |
2 | E5V | 外部5V电源输出. |
3 | OUT0 | 输出0,PWM0, PUL4 |
4 | OUT1 | 输出1,PWM1,DIR4 |
5 | OUT2 | 输出2 PWM2,PUL3 |
6 | OUT3 | 输出3, PWM3,DIR3 |
7 | OUT4 | 输出4 |
8 | OUT5 | 输出5 |
9 | OUT6 | 输出6 |
10 | OUT7 | 输出7 |
OUT0/1/2/3具有PWM的功能,当PWM关闭时为通用输出。
OUT0/1/2/3具有轴3/4的输出功能,通过ATYPE轴参数来设置。
2.2.5.2输出8-11:
1 | EGND | 外部电源地 |
2 | OUT8 | 输出8 |
3 | OUT9 | 输出9 |
4 | OUT10 | 输出10 |
5 | OUT11 | 输出11 |
2.2.6DA信号
针脚号 | 名称 | 说明 |
1 | NC | 备用 |
2 | NC | 备用 |
3 | DA0 | 0-10V模拟输出口0 |
4 | DA1 | 0-10V模拟输出口1 |
5 | DAGND | 外部电源模拟地 |
ZMC464内部DA采用了内部电源。
2.2.7U盘接口信号:
针脚号 | 名称 | 说明 |
1 | V | U盘+5V电源输出 |
2 | D- | 差分数据D- |
3 | D+ | 差分数据D+ |
4 | GND | 内部电源地 |
2.2.8轴接口信号:
提供了0V和+5V输出,可以为编码器提供5V电源。
轴使用前,要通过ATYPE参数来配置轴的使用方式。
针脚号 | 信号 | 说明 |
1 | EGND | 外部电源地 |
2 | IN24-26/ALM | 通用输入,建议做驱动报警 |
3 | OUT12-14/ENABLE | 通用输出,建议驱动使能 |
4 | EA- | 编码器输入 |
5 | EB- | 编码器输入 |
6 | EZ- | 编码器输入 |
7 | +5V | 内部电源+5v输出 |
8 | 备用 | 备用 |
9 | DIR+ | 伺服或步进方向输出 |
10 | GND | 内部电源地 |
11 | PUL- | 伺服或步进脉冲输出 |
12 | 备用 | 备用 |
13 | GND | 内部电源地 |
14 | OVCC | 外部E+24V输出(建议仅供伺服IO ) |
15 | 备用 | 备用 |
16 | 备用 | 备用 |
17 | EA+ | 编码器输入 |
18 | EB+ | 编码器输入 |
19 | EZ+ | 编码器输入 |
20 | GND | 内部电源地 |
21 | GND | 内部电源地 |
22 | DIR- | 伺服或步进方向输出 |
23 | PUL+ | 伺服或步进脉冲输出 |
24 | GND | 内部电源地 |
25 | 备用 | 备用 |
26 | 备用 | 备用 |
2.2.8.1低速差分脉冲口和编码器接线参考

差分连接方式
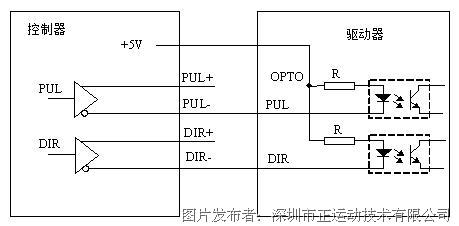
单端连接方式
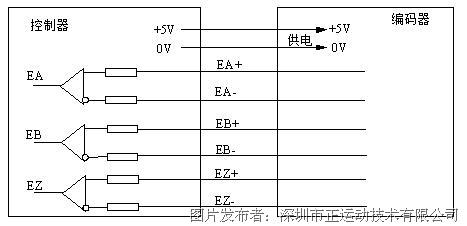
编码器连接方式
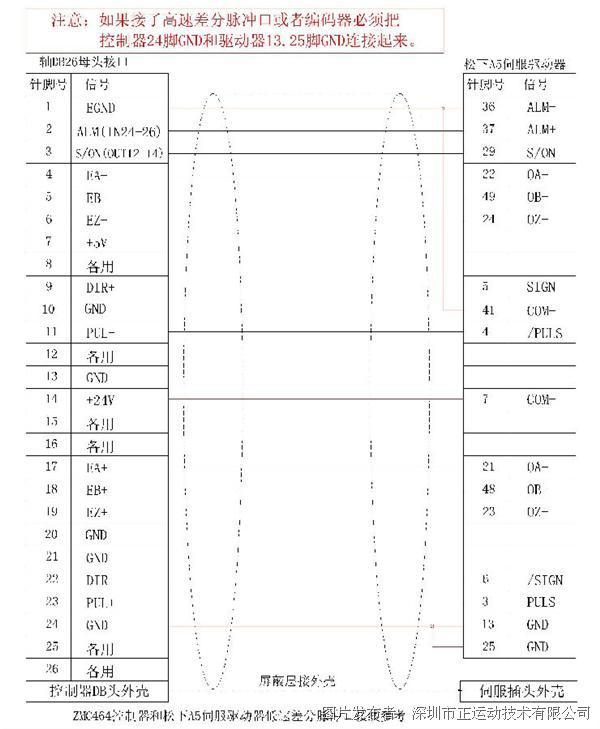
ZMC464控制器和松下A5伺服驱动器低速差分脉冲口接线参考
如果接了高速差分脉冲口或者编码器必须把24脚GND和驱动器13.25脚GND连接起来。
2.2.8.2高速差分脉冲口和编码器接线参考:
速度满足要求时优先使用低速差分脉冲口,使用高速差分脉冲接口时务必将控制器内部数字地连到驱动器高速脉冲口参考地。

差分高速脉冲口连接方式
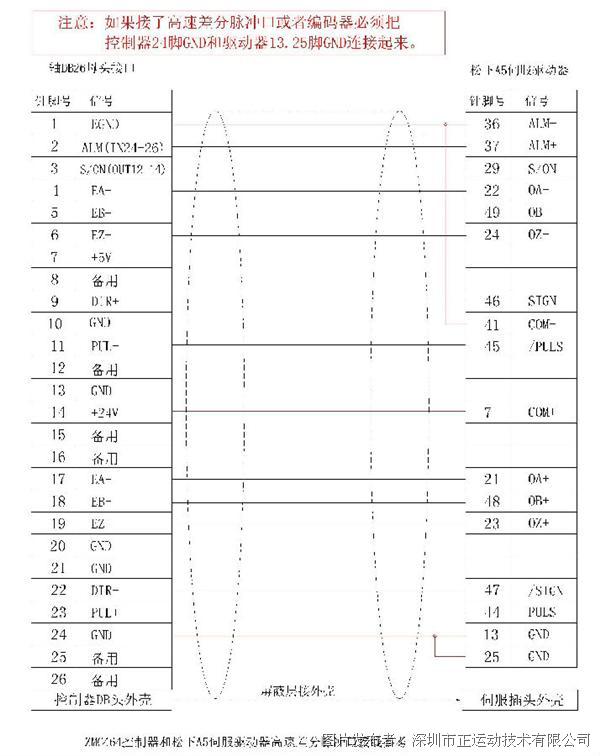
ZMC464控制器和松下A5伺服驱动器高速差分脉冲口接线参考
第三章扩展模块
请参见《ZIO扩展卡硬件手册》、也可以通过EtherCAT模块来扩展。
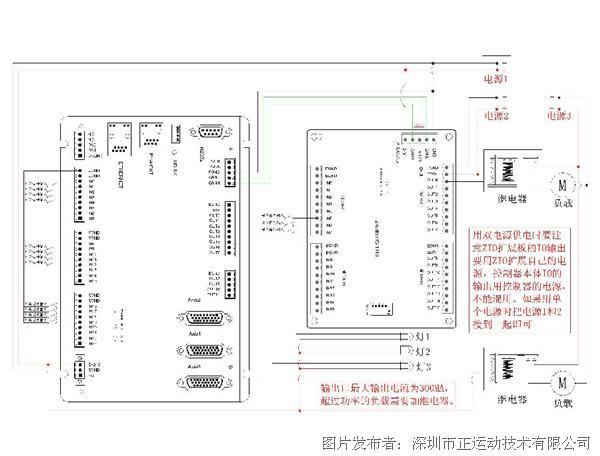
3.1扩展模块CAN总线、输入输出、电源接线参考:
ZMC4系列控制器采用单电源供电,ZIO扩展卡采用双电源供电,使用时将IO板的两路电源接到一路电源即可。ZMC464控制器和ZIO扩展模块用不同电源供电时:控制器电源EGND要连接扩展模块电源的GND,否则可能烧坏CAN。
CAN总线上链接多个ZIO扩展模块时,需要在最末端的ZIO扩展模块CANL与CANH端并接一个120欧姆的电阻。
第四章常见问题
问题 | 解决问题的建议 |
电机不转动。 | 确认控制器的ATYPE有配置正确; 确认脉冲发送方式和驱动器的输入脉冲方式是否匹配; 确认是否有硬件限位,软件限位,ALM信号起作用; 可以用测试软件进行测试,观察脉冲计数等是否正常; |
控制器已经正常工作,正常发出脉冲,但电机不转动。 | 检查驱动器和电机之间的连接是否正确,驱动器与控制器之间的接线是否接触良好。 确保驱动器工作正常,没有出现报警。 |
电机可以转动,但工作不正 常。 | 检查设置减速度和速度是否超过了设备极限; 检查输出脉冲频率是否超过了驱动器的接收极限; 检查控制器和驱动器是否正确接地,抗干扰措施是否做好; 脉冲和方向信号输出端光电隔离电路中使用的限流电阻过大,工作电流偏小。 |
能够控制电机,但电机出现 振荡或是过冲。 | 可能是驱动器参数设置不当,检查驱动器参数设置; 应用软件中加减速时间和运动速度设置不合理。 |
能够控制电机,但工作时,回原点定位不准。 | 原点信号开关是否工作正常; 原点信号是否受到干扰。 |
限位信号不起作用。 | 限位传感器工作不正常; 限位传感器信号受干扰; |
扩展模块连接不上,扩展模块告警灯亮。 | 检查120欧姆电阻是否有安装在两端; 检查是否有多个扩展模块采用同样的ID。 |
输入口检测不到信号 | 检查IO电源有无供给; 检查信号电平是否与输入口匹配。 检查输入口编号是否与IO板的ID相匹配。 |
输出口操作时没有反应 | 检查IO电源有无供给;IO板上也要供IO电源。 检查输出口编号是否与IO板的ID相匹配。 |
控制器网口连接不上 | 网口的灯是否点亮? 是否采用直连网线且电脑不支持自动交叉? 控制器IP地址是否被修改? PC的网卡IP地址是否与控制器一个网段? |
控制器串口连接不上 | 串口参数是否被运行程序修改,可以通过?*SETCOM查看当前的所有串口配置。 |
第五章硬件安装
5.1ZMC464安装尺寸

单位:mm 安装孔直径4.5mm
5.2接线参考

扩展板请参见《ZIO扩展卡硬件手册》和《EIO扩展卡硬件手册》




 投诉建议
投诉建议
提交

正运动全国产EtherCAT运动控制器ZMC432H用户手册

正运动全国产EtherCAT运动控制器ZMC432H

正运动技术运动控制器如何快速实现单轴/多轴同步跟随功能?

正运动ECI1408运动控制卡用户手册

正运动机器视觉运动控制一体机VPLC710