


如何让ABB YUMI机器人 左右手连动?
2019/5/8 11:11:50
1)YUMI 分左右手:
2)连动的本质为一个机械手臂持工具Tool,另一个机械手臂持工件坐标wobj。移动带工件坐标的手臂时,另一个手就会保持相对位置而跟随运动。
3)假设右手为持工件坐标,左手tool(即左手跟着右手动)
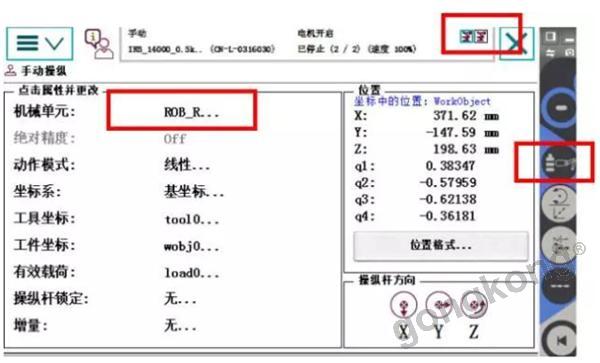
4)在手动操作界面,切换到控制左手:
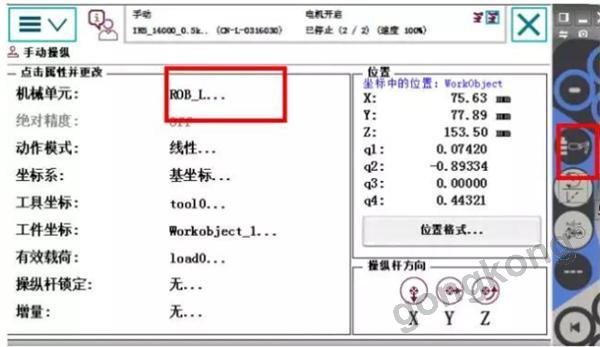 5)点击工件坐标,创建工件坐标Workobject_1,如下:
5)点击工件坐标,创建工件坐标Workobject_1,如下:
 6)点击编辑,更改值,修改如下:
6)点击编辑,更改值,修改如下:
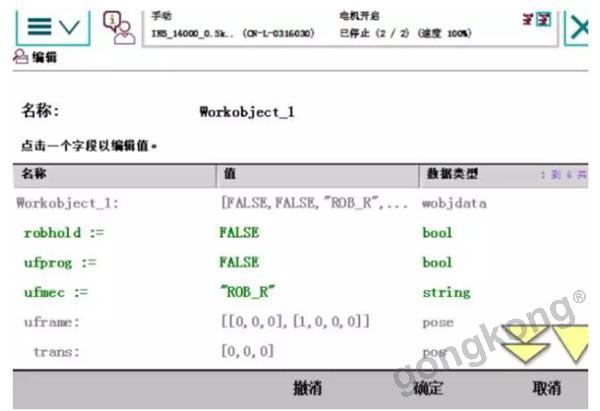
即该坐标系由右手驱动
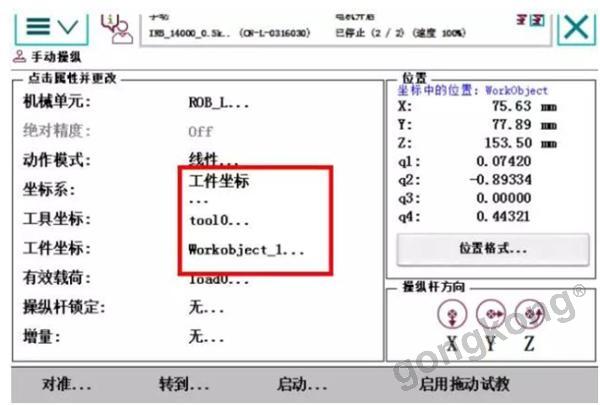
7)修改左手手动操纵设置如下:
 8)此时切换到控制右手,此时注意到两个机器人均被选中,可以连动:
8)此时切换到控制右手,此时注意到两个机器人均被选中,可以连动:
 9)移动右手,左手跟动。
9)移动右手,左手跟动。
审核编辑(
王静
)




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

践行“双碳” 引领绿色高质发展| 10月玻璃行业超低排放绿色发展研讨会落地宜昌

新工业芯存储,得一微助力工业智能升级

如何合理规划配电网的网络安全策略与解决方案
聚势日照 看钙粉大势 11月12-15日第二届钙博会邀您共襄盛举
精彩回顾 | Synapticon 携一体化运动控制解决方案亮相2023工博会