


皮尔磁:GB/T 16855.1标准中的新增内容:重叠危险
2019年6月5日,皮尔磁协同全国机械安全标准化技术委员会秘书处,在上海成功举办了机械安全控制系统技术研讨会-暨新版GB/T 16855.1(ISO 13849-1)标准宣贯会。
GB/T 16855.1
2018年12月31日,国家市场监督管理总局、中国国家标准化管理委员会发布了新版本的GB/T 16855.1,该标准等同采用ISO 13849-1:2015,将于2019年7月1日实施。
对比老版本的标准,新版GB/T 16855.1有不少变化,“重叠危险”就是其中一个新增的概念。
重叠危险
标准附录A中有以下新增内容。
A.3 重叠危险
使用本部分时,所有危险都作为一个特定危险或危险状况。为了量化风险,每个危险均可单独评价。
如果存在显著的、总是同时发生的直接关联危险的组合,那么在风险估计时宜将它们组合。
进行机器风险评估时宜考虑确定危险是否宜单独考虑或进行组合。
示例
•一个连续焊接机器人会产生多种同时存在的危险状况,比如由运动造成的挤压以及由于焊接过程导致的灼伤。这可作为一个直接关联危险的组合。
•不同的机器人在一个机器人站内工作,每个机器人分别考虑。
•作为风险评估的结果,对带有夹持设备的旋转台上,每个夹持设备分别考虑可能就足够了。
实践应用
如下图所示,操作人员如停留在危险区域1和危险区域2时,面临可能不止一个机器人意外启动造成人员受伤的可能性。
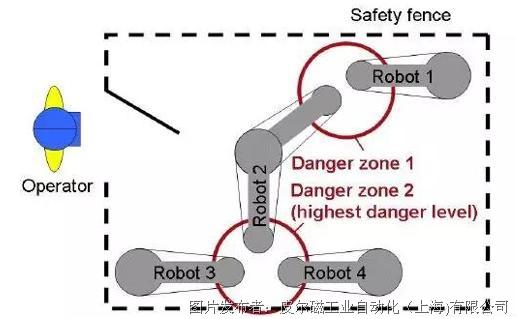
因此,当可能同时发生多个危险动作时,必须考虑所有能够伤害操作员所处位置的执行器的PFHD(每小时平均危险失效概率)。
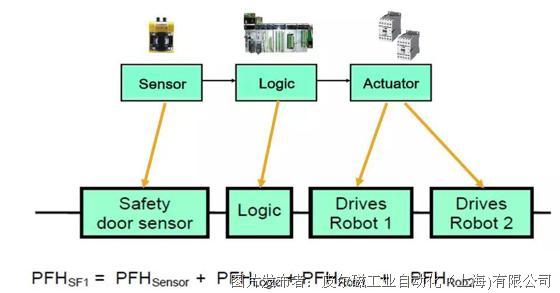
对于每个危险区,必须定义能够充分降低风险的安全功能。安全门联锁(左侧操作人员进入的安全门)作为一个安全功能,可以降低危险区域1中2台机器人意外启动的风险。安全门打开后,危险区域1中的机器人1和机器人2的驱动器停止。因此实现该安全功能的控制系统的相关安全部件的PFHD值宜考虑重叠危险,计算如下:
皮尔磁是全国机械安全标准化技术委员会第四工作组(安全控制系统)的承办单位,主导了新版GB/T 16855.1标准的修订工作,因此对于标准的解读更加权威。




 投诉建议
投诉建议
提交

皮尔磁:AGV系统的工业信息安全

皮尔磁:用于身体保护的安全光栅
皮尔磁:2022,不可错过的精彩!
皮尔磁:多功能型燃烧炉管理控制系统

皮尔磁:那么多安全PLC,它凭什么这么抢手?