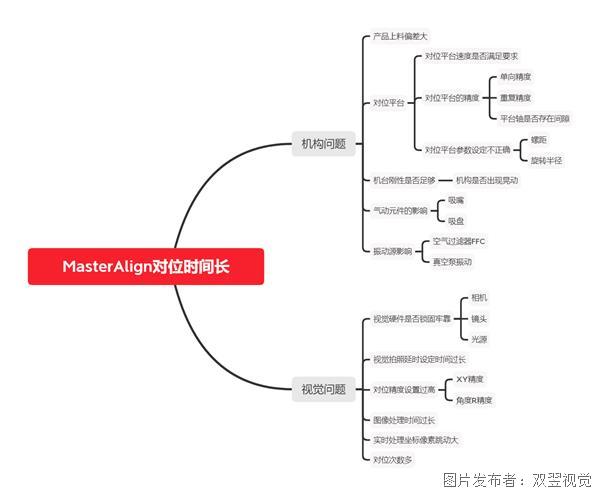
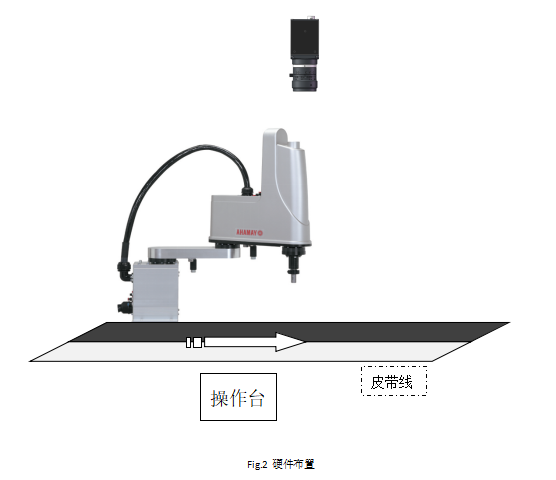
1、 硬件布置
相机的安装方向:以操作者站立调试的位置为基准(一般就是显示器的位置),相机的螺丝孔面朝向操作者,标签面(即正面)远离操作者。这样才能保证实际图像和显示器图像保持一致性,方便调试。

机械手的安装方向:以操作者站立调试的位置为基准(一般就是显示器的位置),以雅马哈四轴SCARA机械手为例,机械手的安装方向如下:
2、软件权限的登陆
①点击软件左上角的“橙色图标”,点击“用户”进入用户设置界面;
②在用户管理界面,输入供应商权限密码:“310525”,点击“用户登陆”,进入软件管理权。
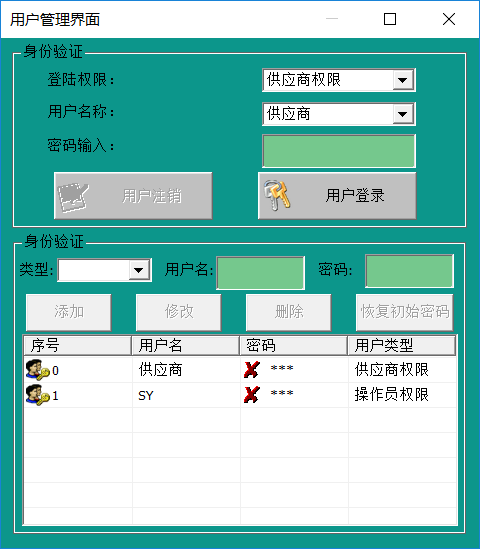
③只有登陆权限,才可以设置软件参数,修改产品模板,非登陆状态,不能更改以上数据。
3、 产品换型
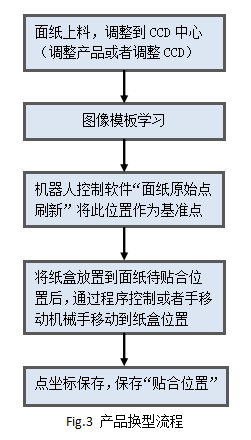
3.1、面纸上料,调整到CCD中心
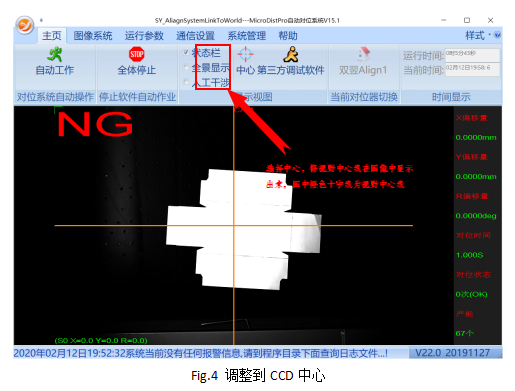
软件上点击中心,在图像中可以看到橙色的十字线,这个为视野中心,在面纸上料过程中,我们需要将面纸的特征点放置到橙色十字交点即视野中心位置。
3.2、图像模板学习
Ø Step1:如图5所示,通过“通道名称”处选择我们要进行模板学习的通道,然后进行“主模板登录”进行图像的模板学习。
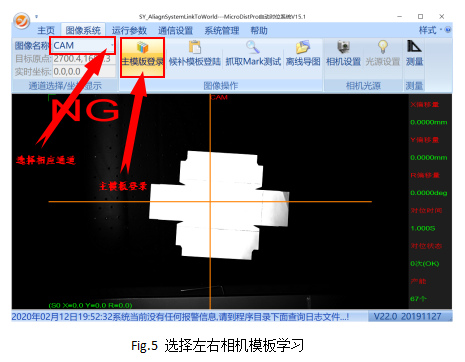
Ø Step2:如图6所示,下拉重新选择“边缘匹配”,黄色的模板框工具则会显示出来,通过拖拽调整位置和大小到合适,再点击“方法学习”,则学习记录当前的模板。
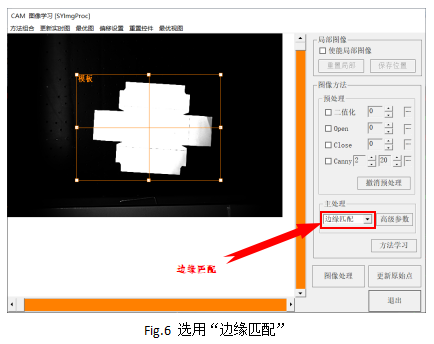
Ø Step3:调整高级参数。点击“高级参数”,进入高级参数界面,调整参数如下图7。可根据实际情况修改“分数”、“角度容差”参数。
“分数”是限定模板匹配度相似度的参数,范围:0~1,代表图像与模板相似度必须高于该设定值。否则认为NG。
“角度容差”是限定匹配角度范围的参数,范围:0°~ 180°,代表允许角度偏差范围:±0°~±180°。超出则NG。
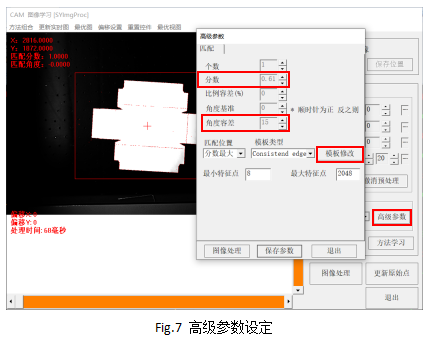
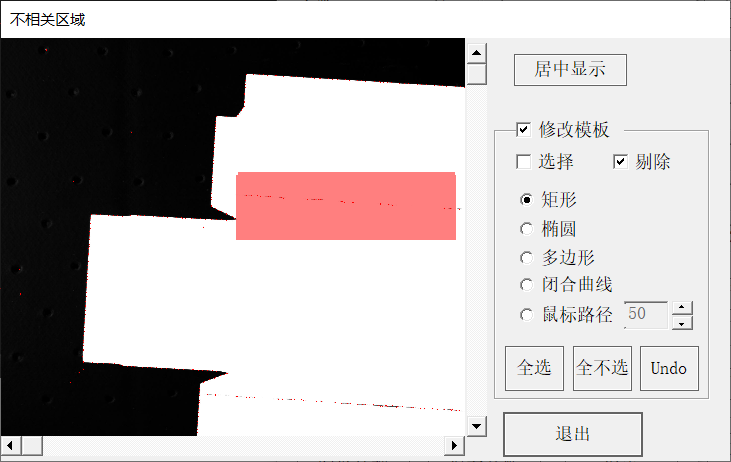
Ø Step4:模板修改。点击高级参数界面的模板修改则可以进入模板修改界面。模板修改的主要目的是擦除干扰区域以减小不相关区域对图像模板的影响。首先勾选“修改模板”,再勾选“剔除”,使用以下图像工具中的一种进行干扰区域的擦除。图中红色区域即为擦除的区域。
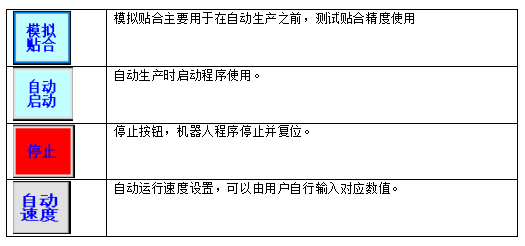
3.3、机器人-面纸原始点刷新
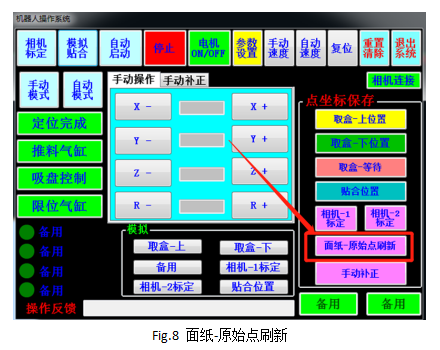
面纸-原始点刷新功能主要是设定面纸的基准位置。
3.4、保存贴合位置
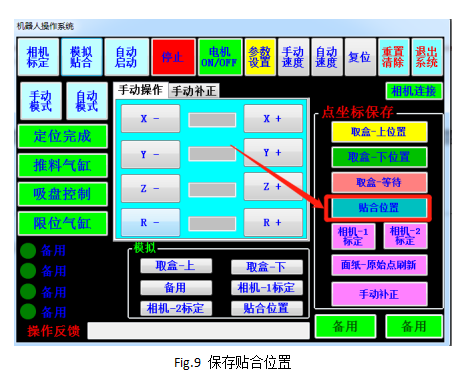
将机械手移动到贴合的位置,将此位置保存为贴合位置。
4、相机自动标定
相机自动标定流程主要目的是建立相机和机械手的关系。
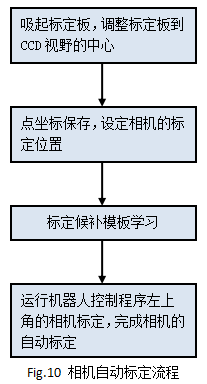
4.1、调整标定模板到视野中心

4.2、保存相机标定位置
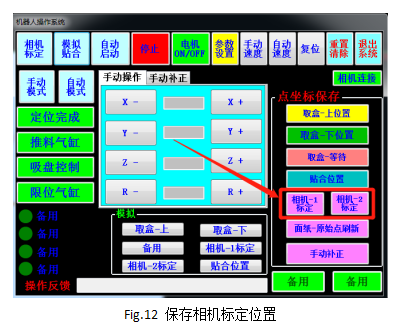
机械手吸起标定板,移动到相机的视野中心,鼠标左键点击“相机-1标定”进行单相机标定位置点位的保存。
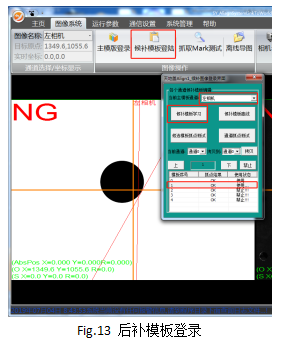
4.3、候补模板登录进行图像学习
候补模板登录方法如下所示:
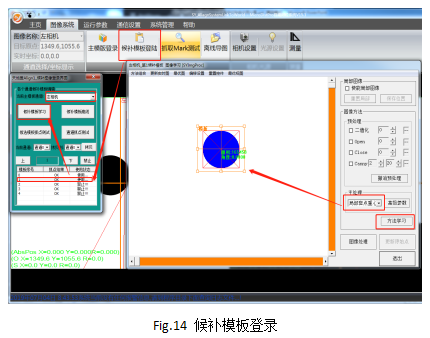
标定应用说明:
机械手吸起标定板,将圆形Mark移动到图像视野中心。
标定的图像学习,使用后补模板登录如左图所示,选中序号1,然后进行图像学习。
序号0为主模板,序号1为我们选择的候补模板。
标定的图像学习,使用后补模板登录如左图所示,选中序号1,然后进行图像学习。
标定板学习方法为:“局部斑点重心”
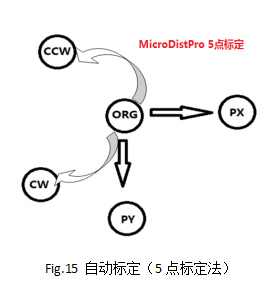
相机标定,通过机器手平台自动完成相机和平台的关系建立,特别方便客户换型,用户只需要1分钟即可完成标定。
4.4、相机自动标定
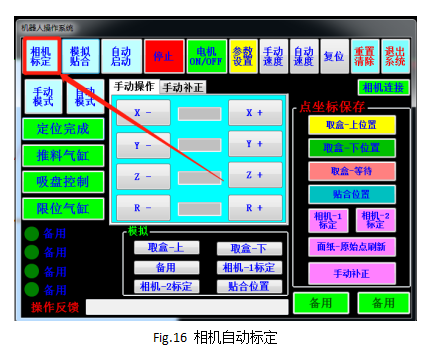
执行左上角“相机标定”后,进行单相机的自动标定,此过程主要目的是将相机坐标系和机械手坐标系关联到一起。
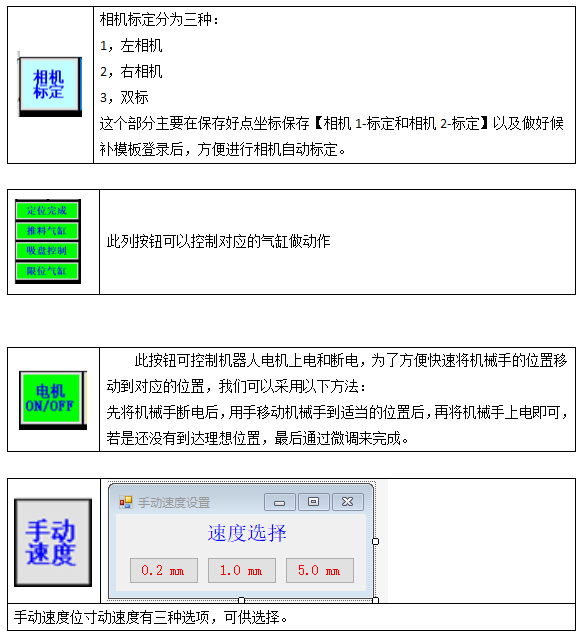
5、机器人控制软件

机器人控制软件主要用于辅助进行机械手的简单功能调试。主要功能以模式分为两部分,自动模式和手动模式。
具体功能:
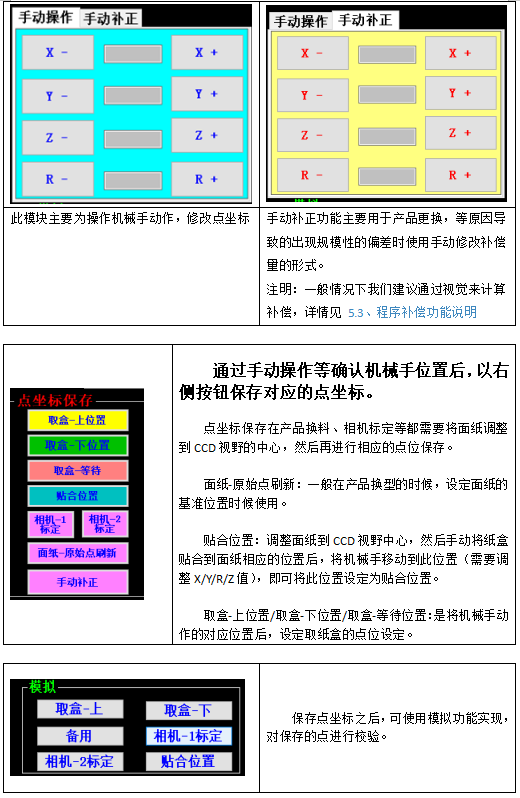
5.1、手动模式
手动模式下可以使用的功能如下:
5.2、自动模式
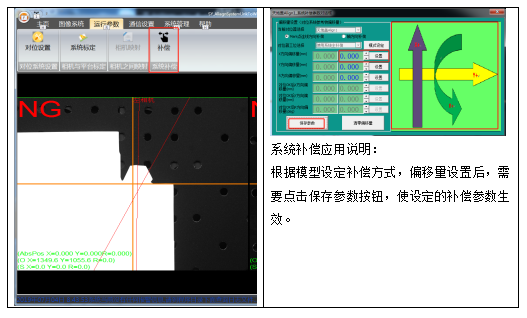
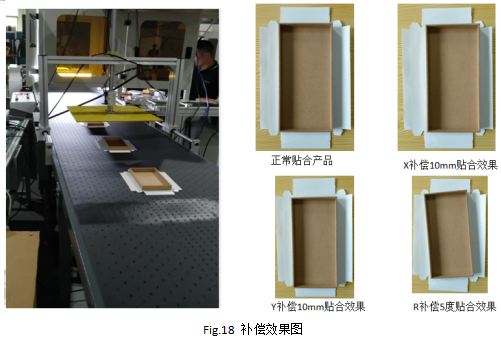
5.3、程序补偿功能说明







 投诉建议
投诉建议