


双翌精密电动平台精度测试软件PMPT介绍
一、测试原理概述
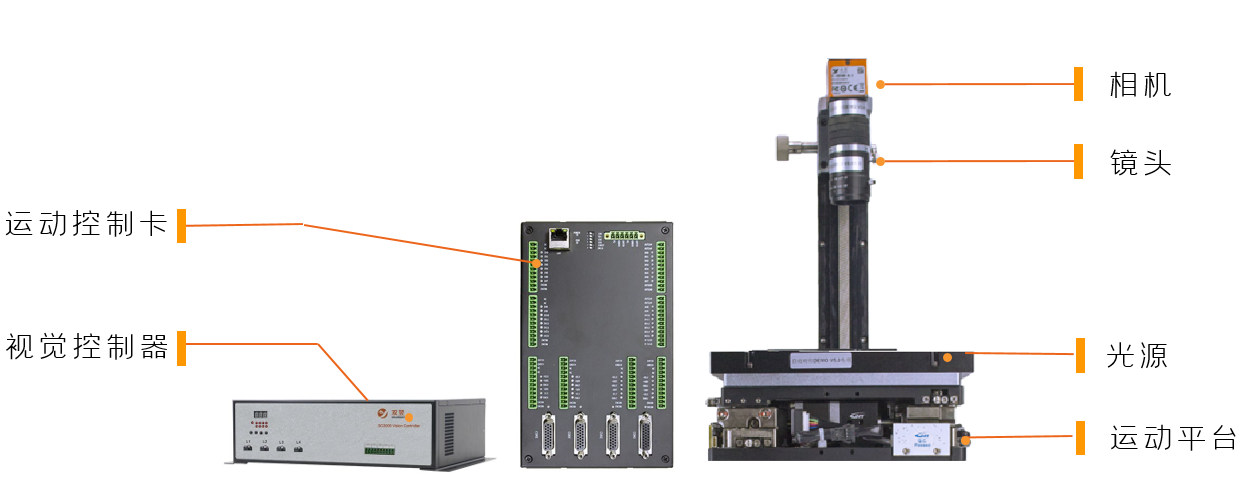
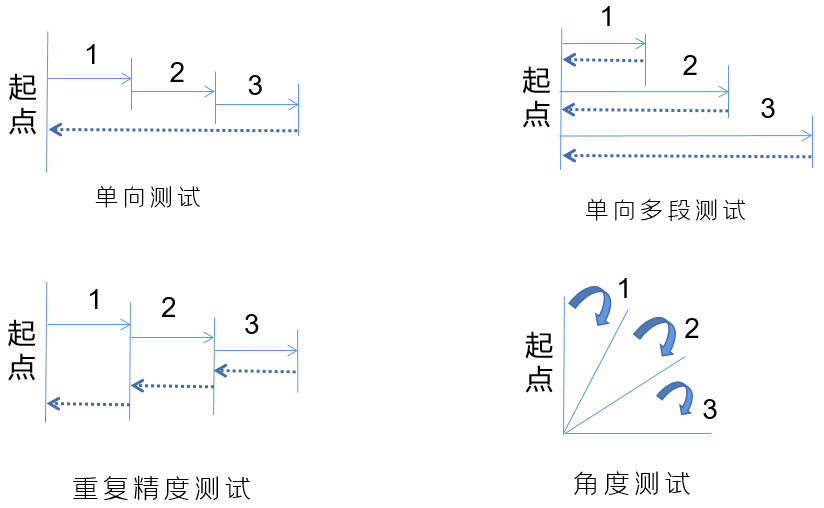
相机标定后即可建立图像坐标与物理坐标的关系。测试时系统控制平台进行多种方式的运动,视觉系统记录平台每次运动前后Mark点的坐标及角度,并以此来计算平台实际的运动量和运动偏差。
系统使用原点标定板进行标定,先用BLOB工具对圆点进行筛选和定位,然后以图像最中心的圆点为物理坐标原点,根据标定板的点间距计算每个圆点中心的物理坐标。

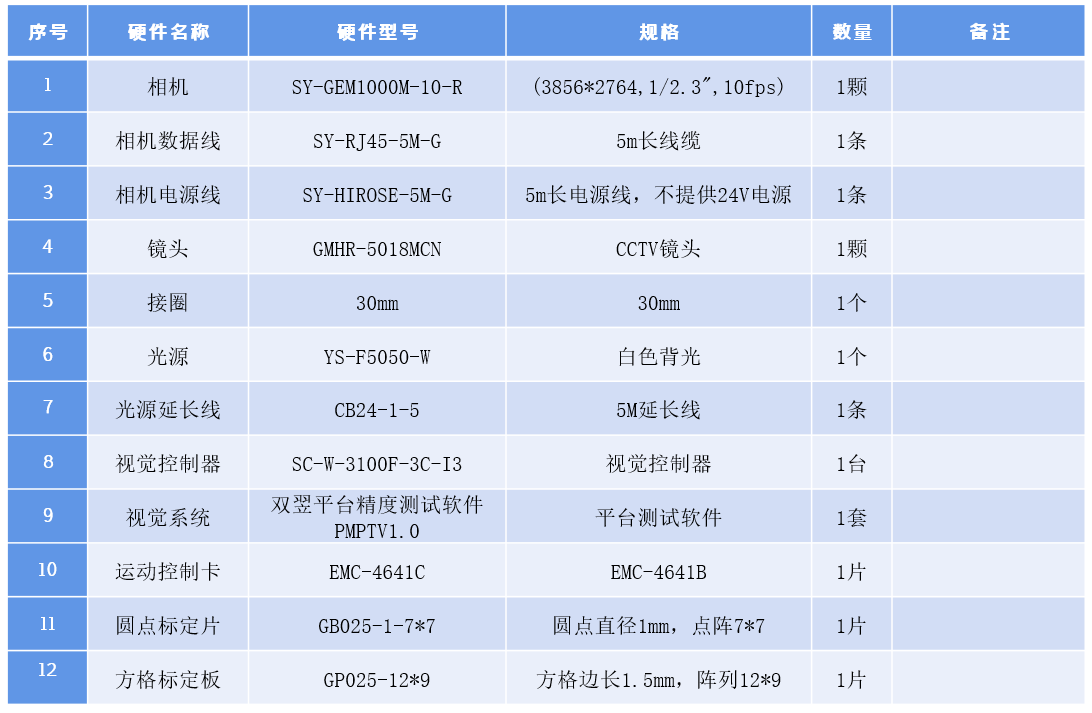
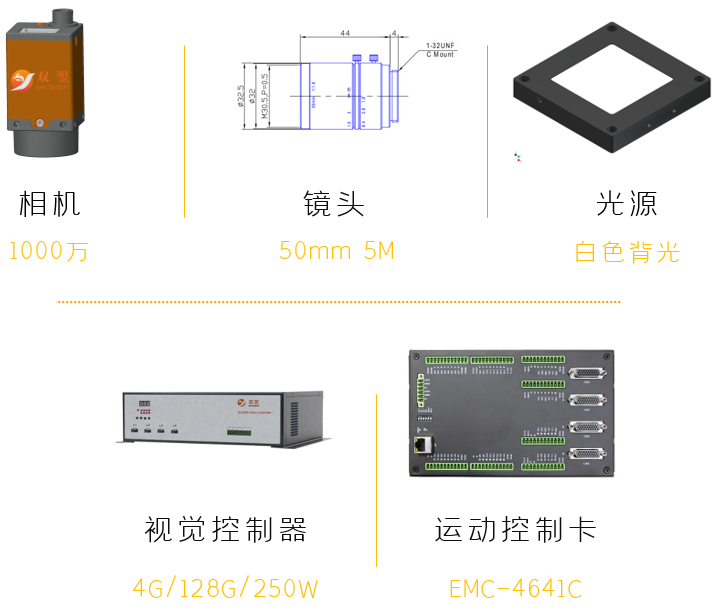
二、系统配置清单
三、软件界面介绍
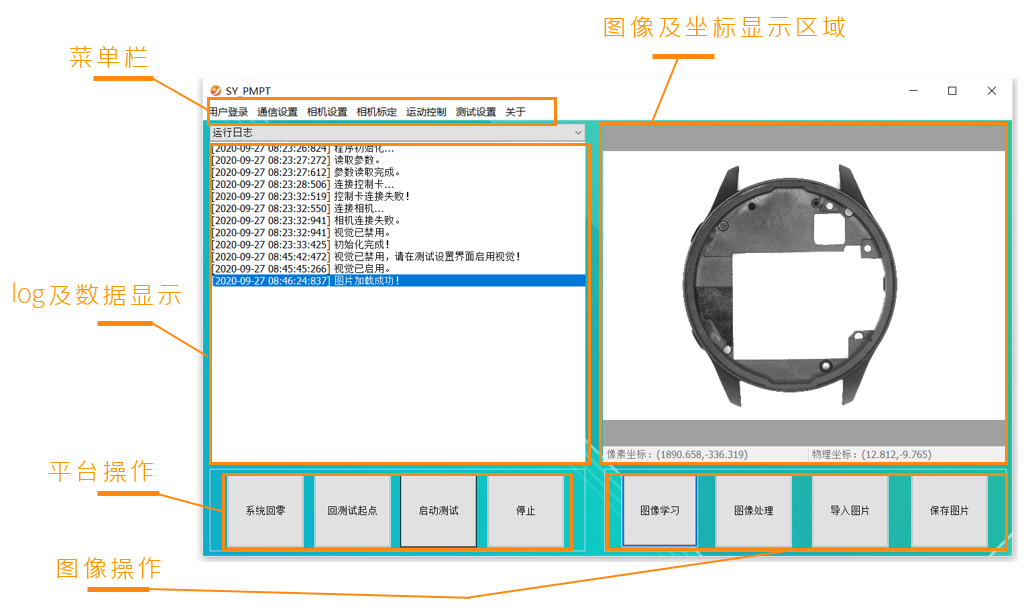
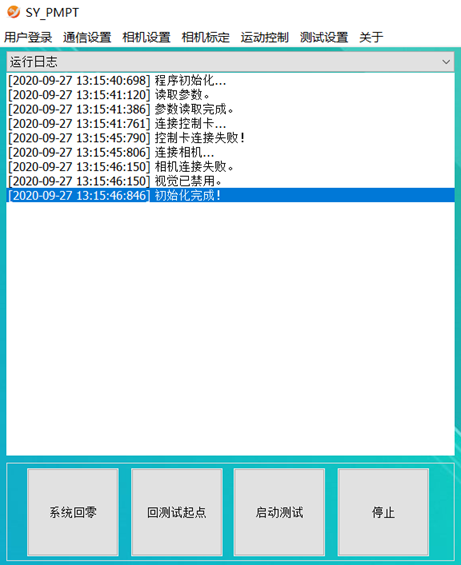
1.主界面介绍
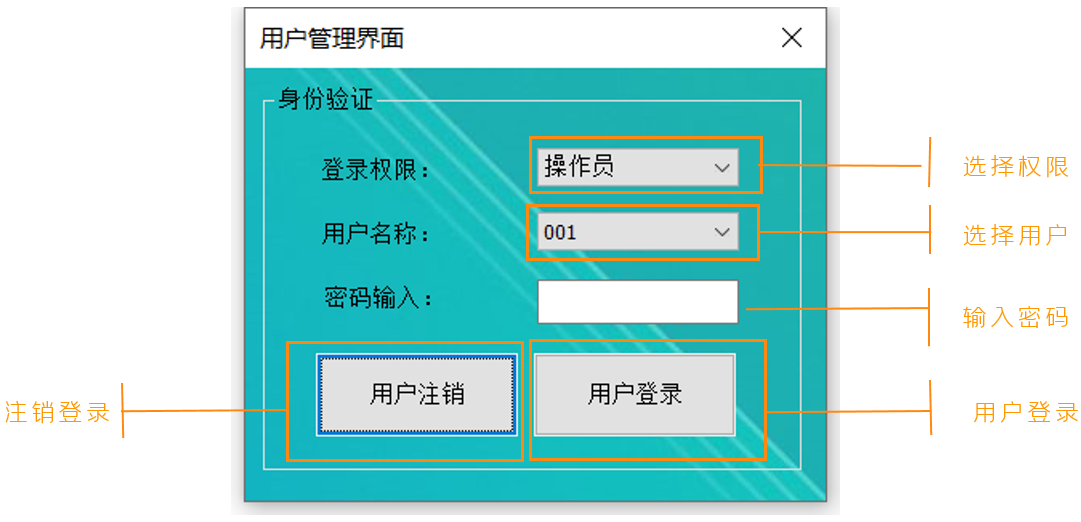
2.用户管理界面
操作员权限:只允许操作测试界面,默认无密码
工程师权限:允许操作软件所有内容,默认密码为:310525
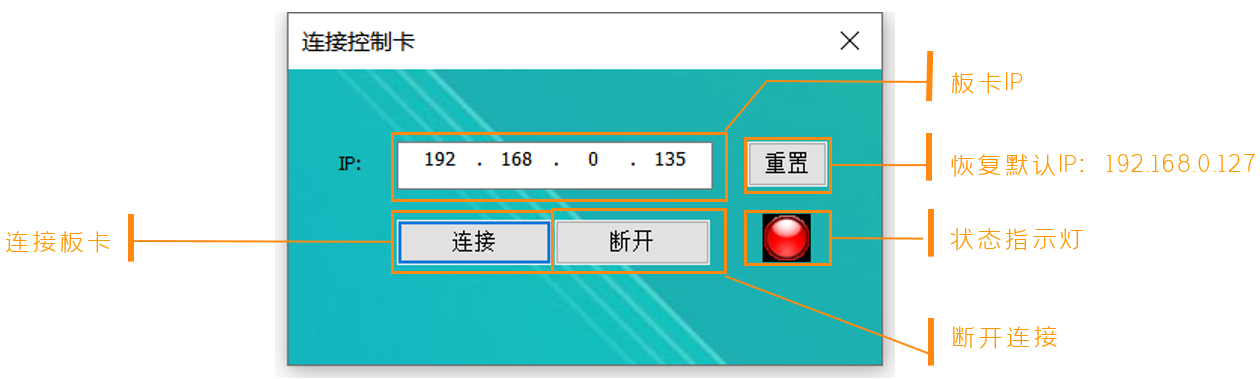
3.通信设置界面
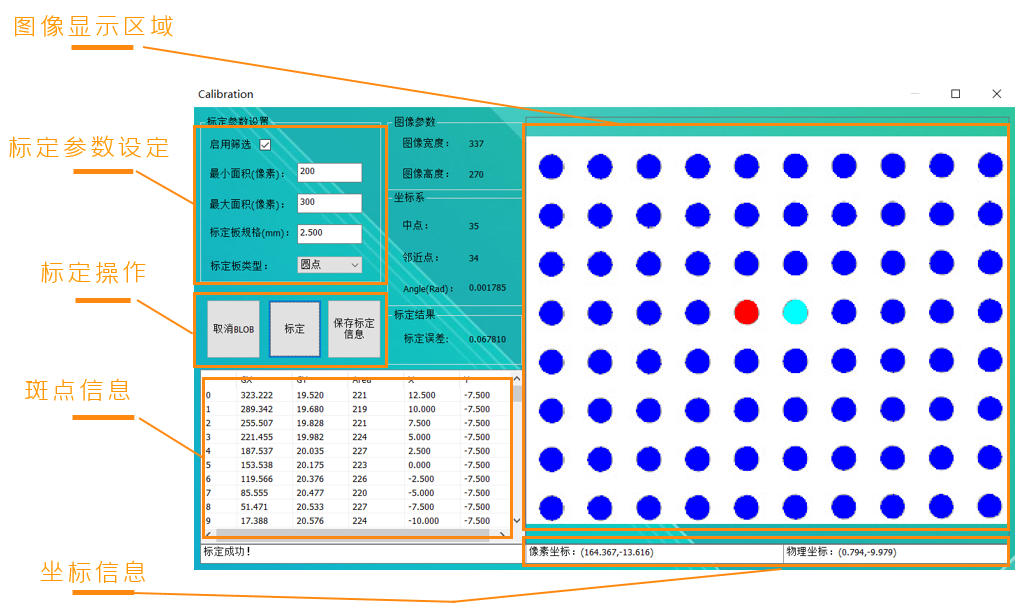
4.相机标定界面
标定步骤:
(1)将标定板放在相机下拍照
(2)打开标定界面
(3)点击“BLOB”,得到斑点信息
(4)根据斑点面积筛选出合适的mark点
(5)再次点击“BLOB”
(6)点击标定,查看标定结果,误差值越小越好
(7)保存标定信息
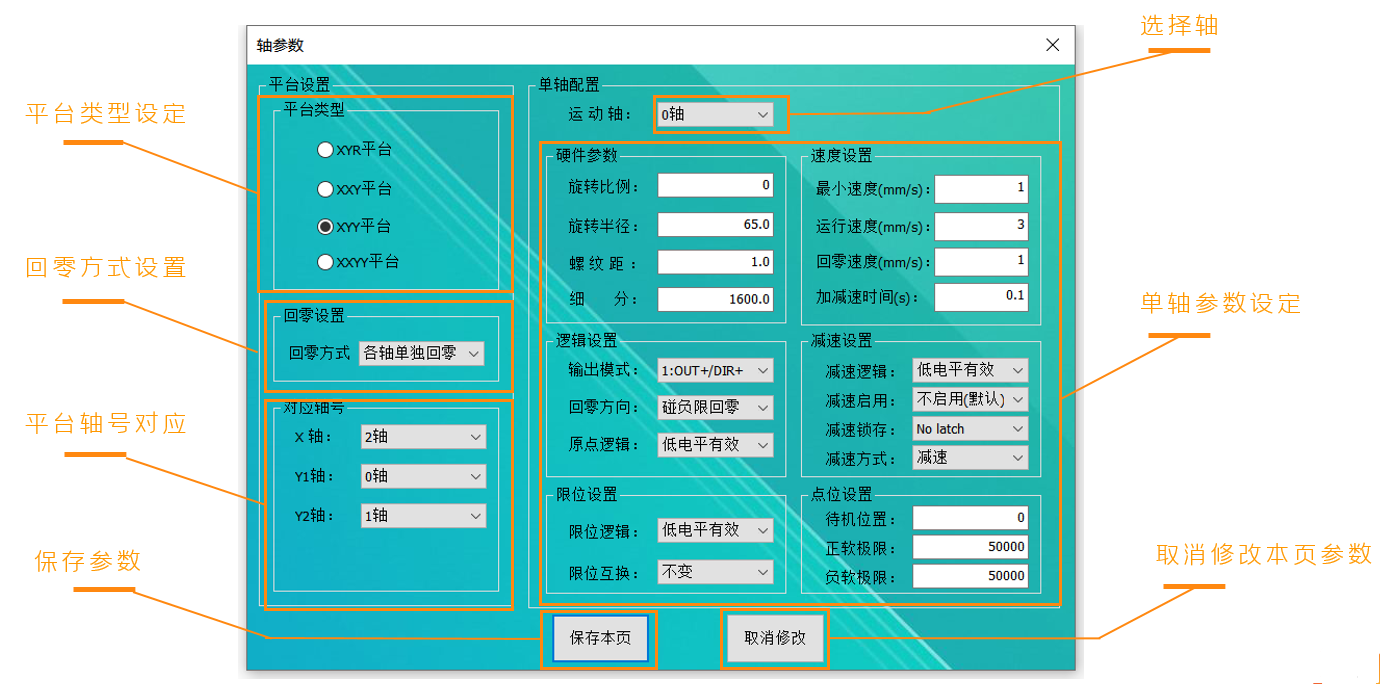
5.平台参数设置界面
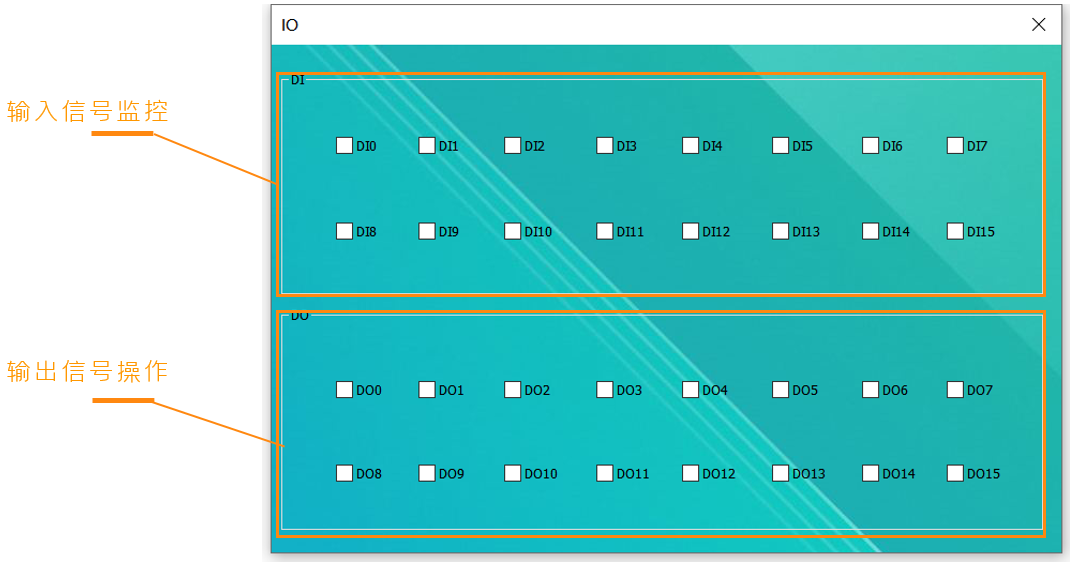
6.IO显示界面
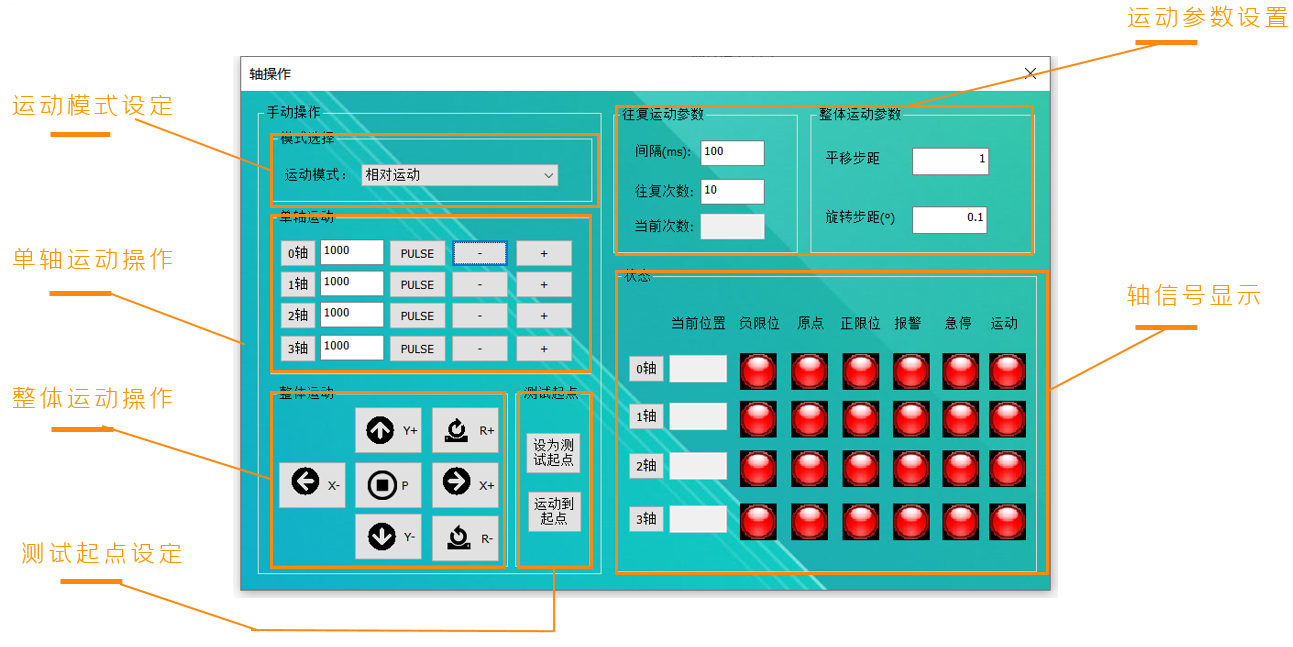
7.轴操作界面
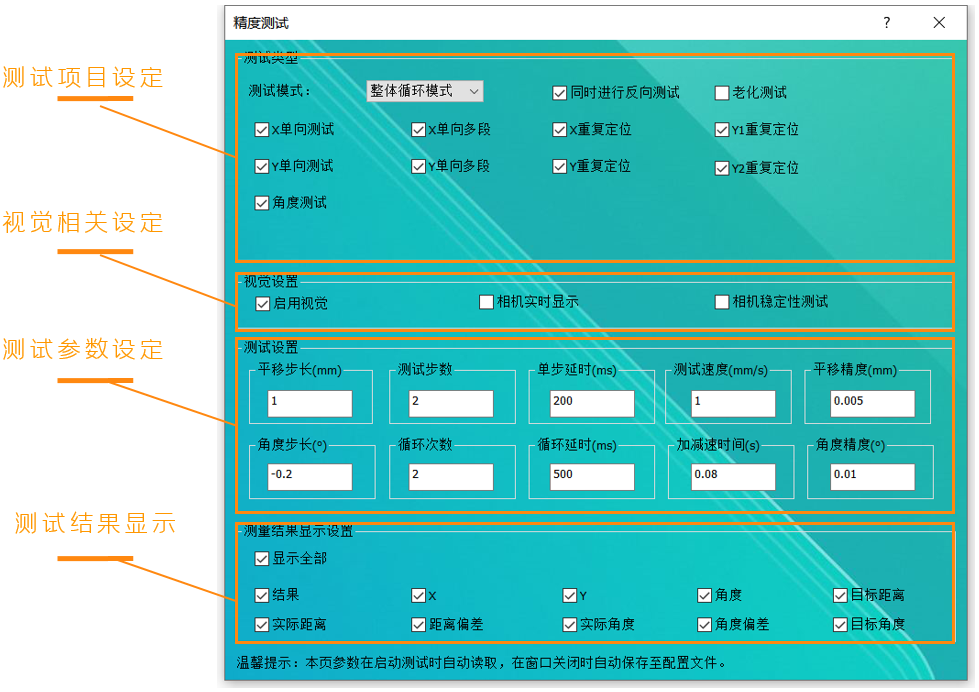
8.测试设置界面
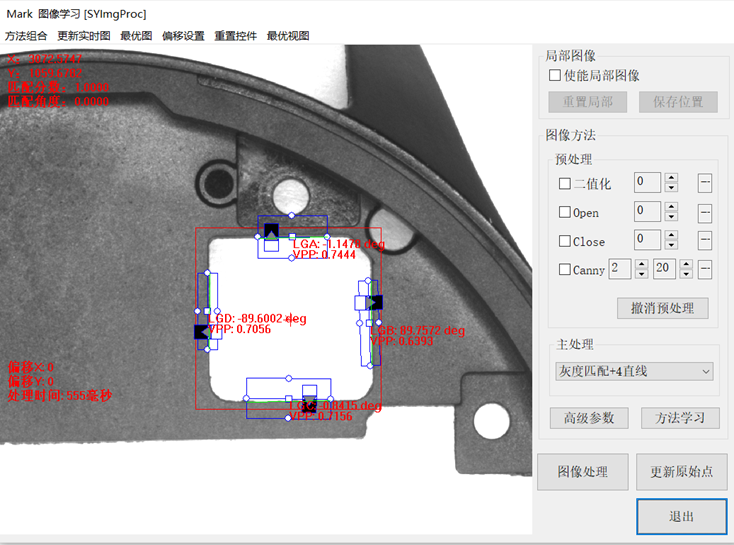
9.图像学习界面
图像学习步骤:
(1)点击主界面“图像学习”按钮。
(2)点击“方法组合”,勾选“灰度匹配+4直线”。
(3)点击“主处理”中的“灰度匹配+4直线”,调整工具位置。
(4)点击“方法学习”。
(5)点击“退出”。
四、软件操作流程
1.启动SY_PMPT程序,启动时自动连接相机和板卡,如果没有检测到相机,系统自动禁用视觉。
2.用户登录。
3.板卡连接失败时在通信设置界面手动设置IP进行连接。
4.在运动控制中设置好轴参数。
5.启用视觉时需要进行相机标定。
6.在测试界面设置好相关参数。
7.启动测试。
五、查看测试数据
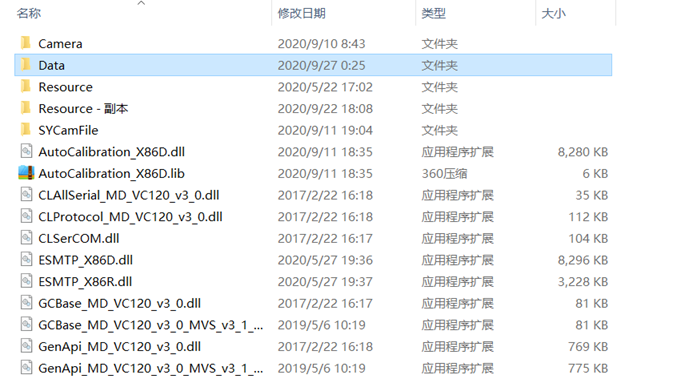
1.配置文件保存在程序根目录下的“Resource”文件夹中。
2.Log及测试数据保存在程序根目录下的“Data”文件夹中。




 投诉建议
投诉建议
提交
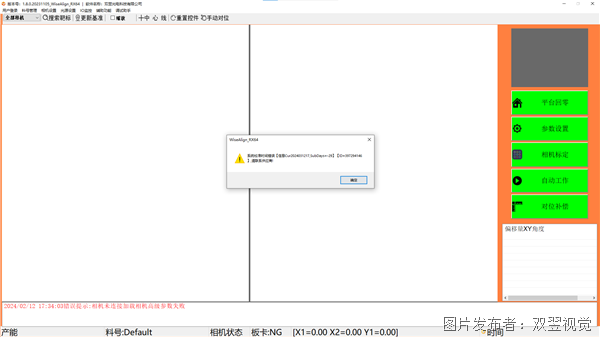
WiseAlign视觉对位软件提示系统校准时间错误解决方案
MasterAlign视觉对位软件提示系统校准时间错误解决方案

MasterAlign全景视觉引导应用
MasterAlign模切视觉应用软件说
MasterAlign智能穿戴视觉应用说明