


双翌对位视觉系统图像处理方法说明
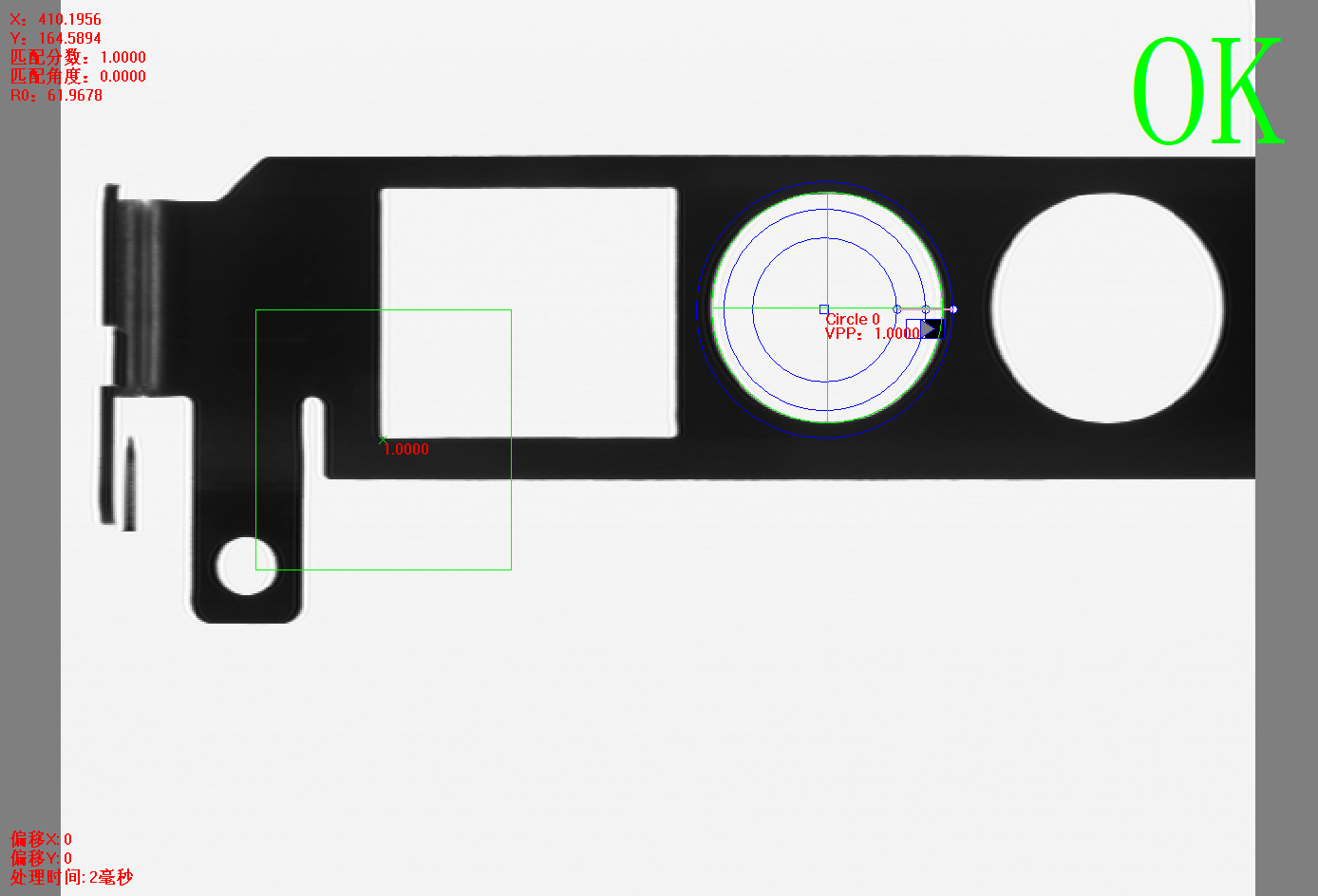
圆心,通过圆工具获得圆心坐标及半径。
匹配作为粗定位使用,圆工具跟随粗定位自动改变位置;对于目标比较固定的情况,可不采用粗定位功能。
当不需要粗定位时,可跳过匹配类参数调整,直接对测量类参数进行调整。
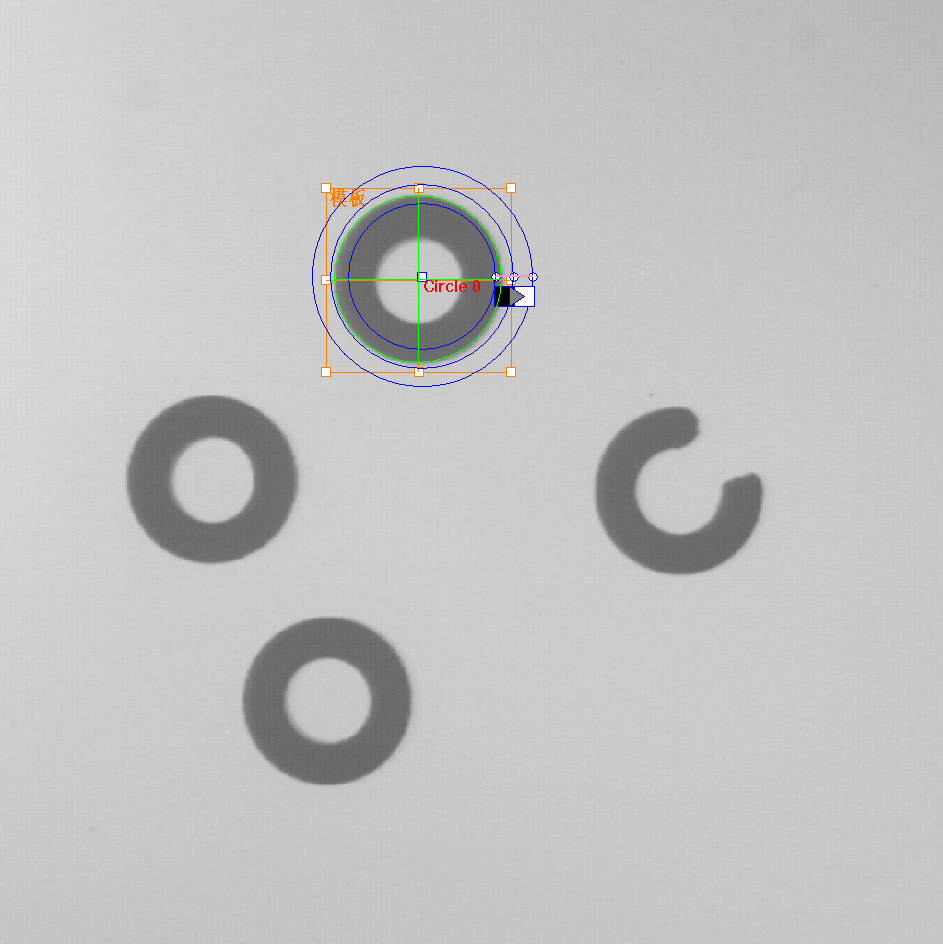
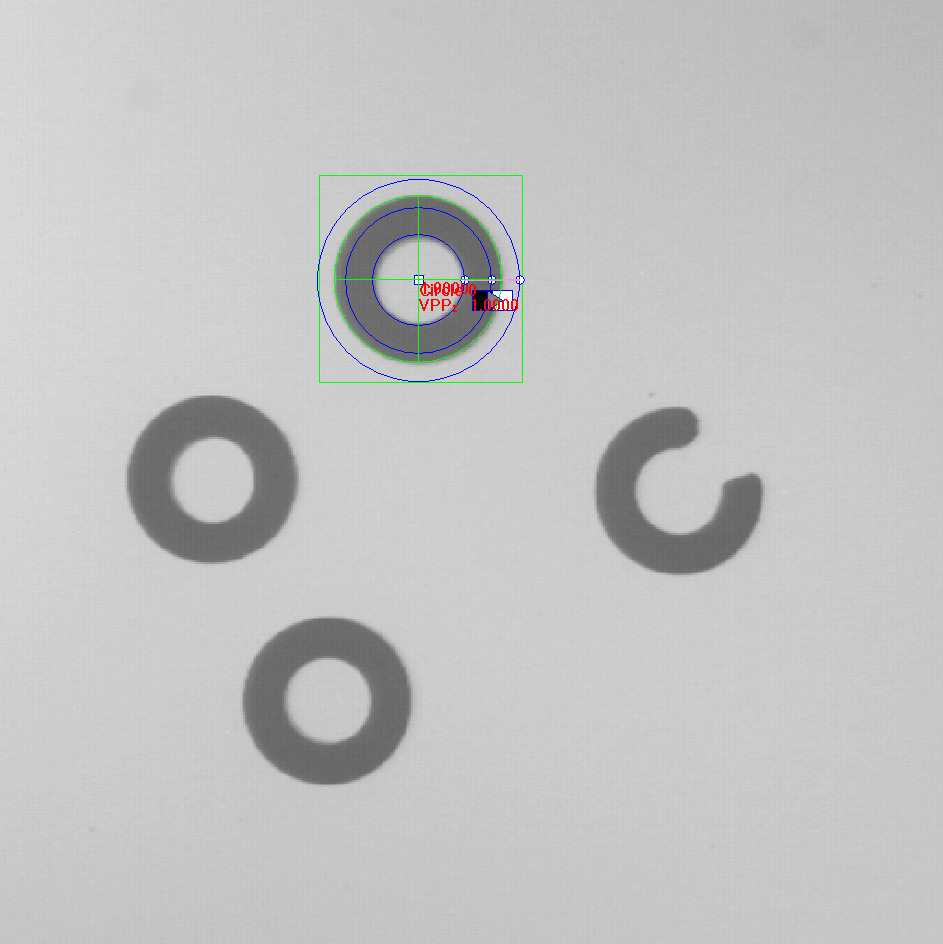
1.模板选择与圆工具摆放
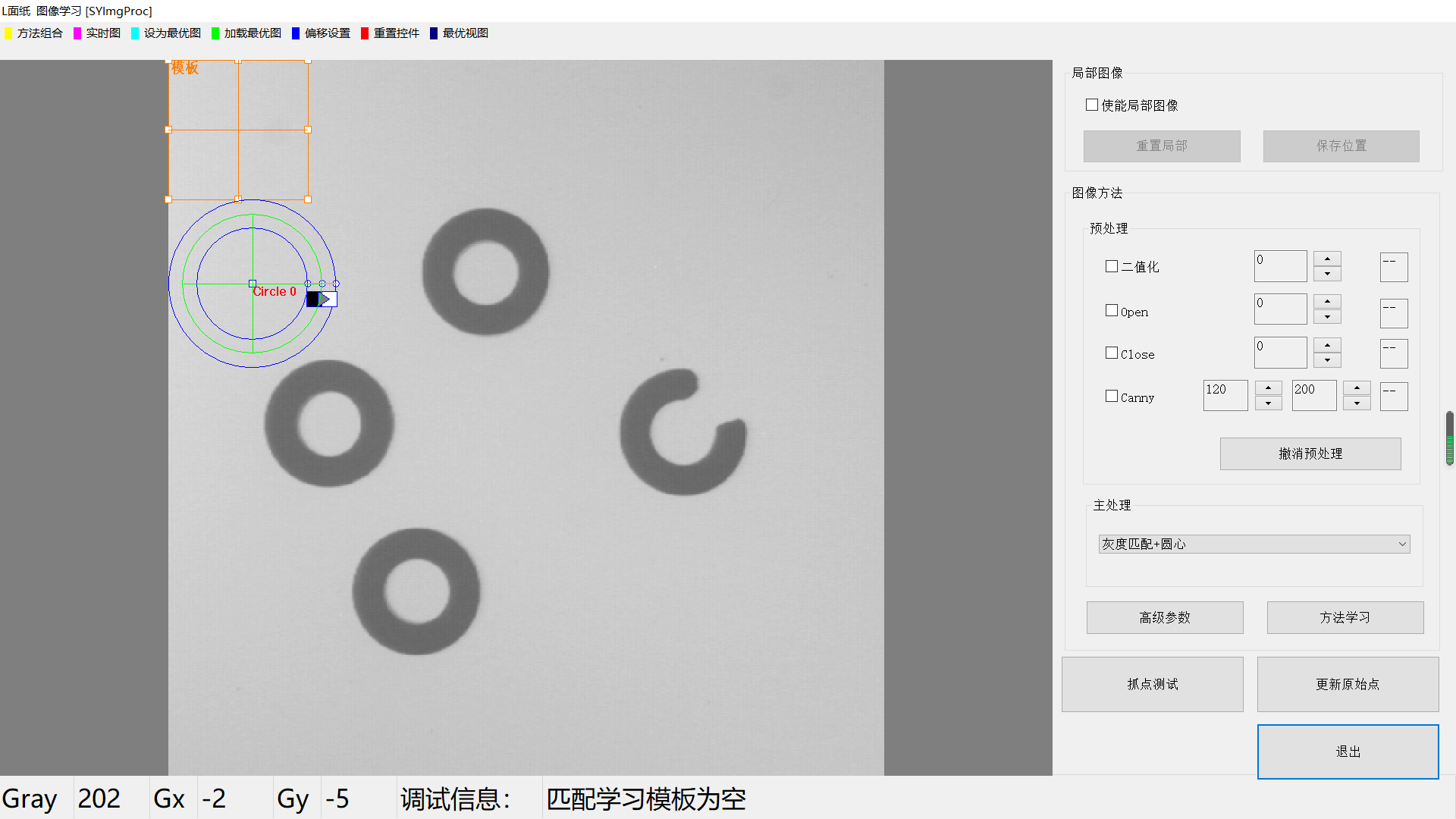
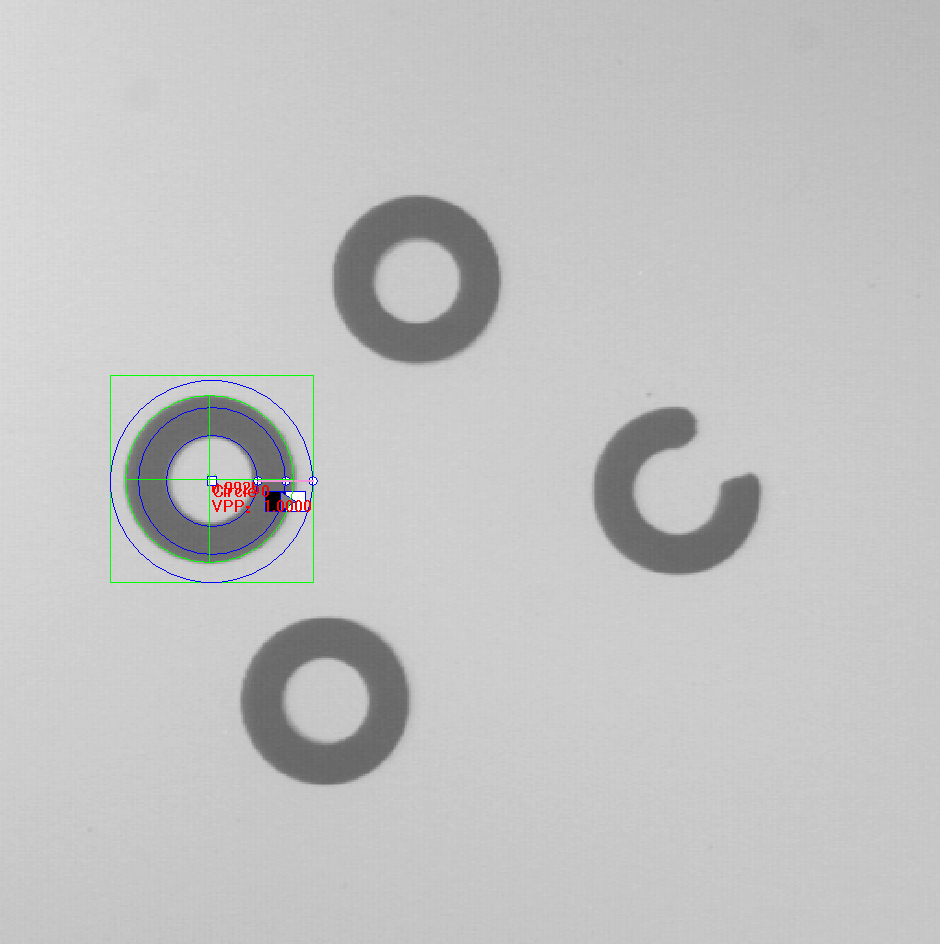
在主处理下拉列表中选择【灰度匹配+圆心】,在图像范围内显示橙色矩形框和圆工具。如果未见,请点击工具栏上方的【重置控件】。
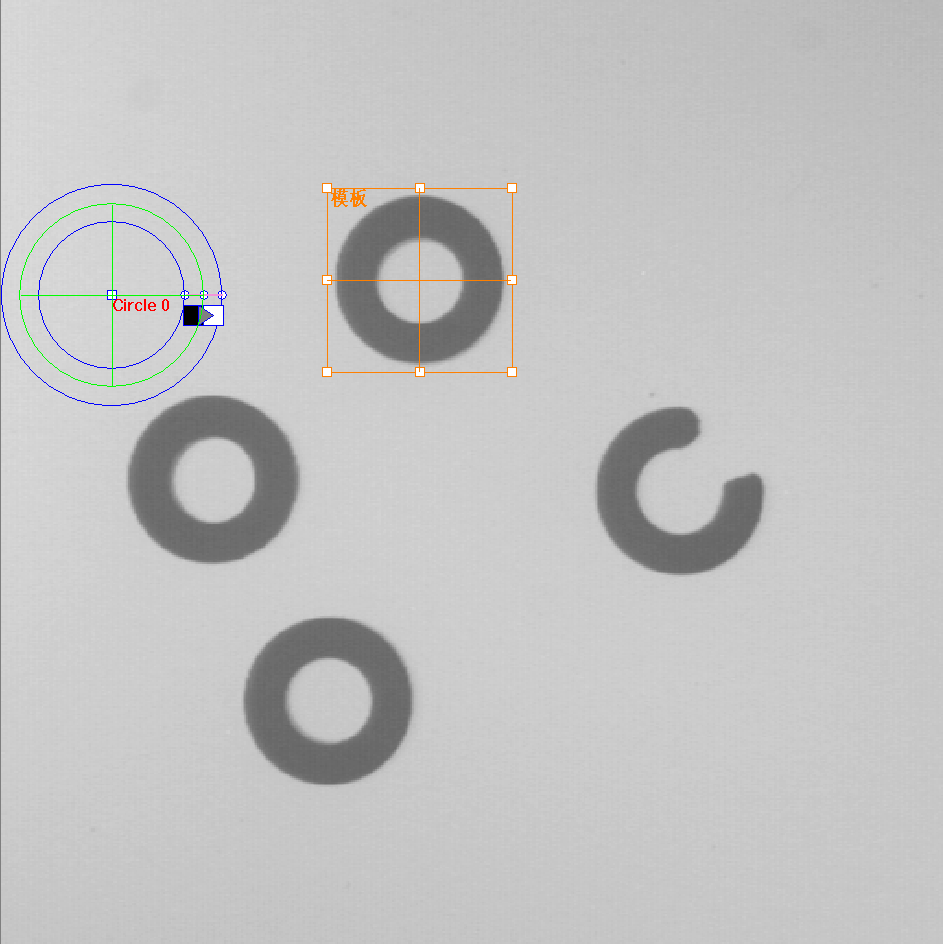
1.1模板选择
通过鼠标改变ROI的大小,并拖放至适当的位置作为学习的模板
1.2圆工具摆放
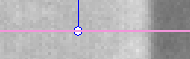
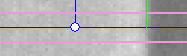
1.2.1圆工具的鼠标响应
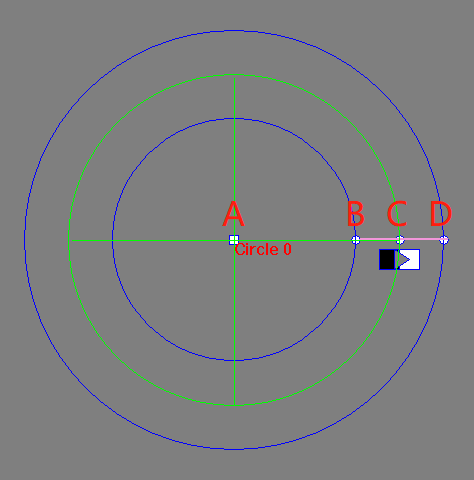
【1】圆工具有4个鼠标控制点,如上图所示。
控制点A:使用鼠标点选该控制点可拖动整个圆工具
控制点B、D:使用鼠标点选该控制点可改变圆环的宽度
控制点C:使用鼠标点选该控制点可改变圆工具的半径
【2】鼠标左键双击控制点A,可改变测量的极性,请注意黑白标签的改变。
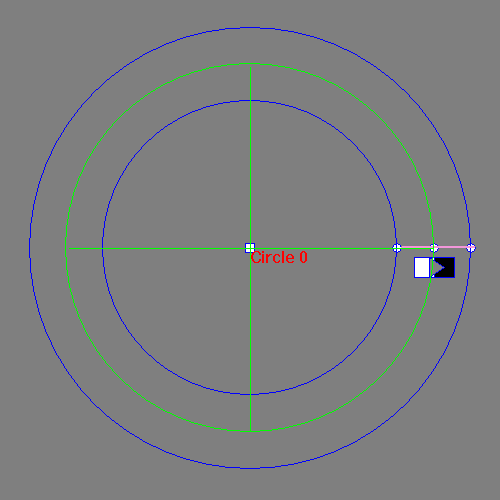
从黑到白 从白到黑
【3】鼠标右键双击控制点A,可改变测量的方向,请注意黑白标签上三角箭头的改变。
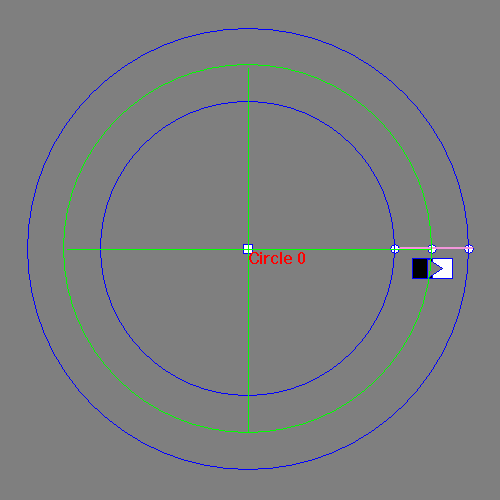
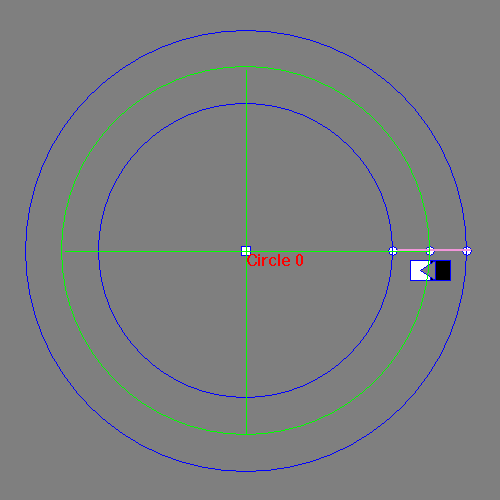
从内到外 从外到内
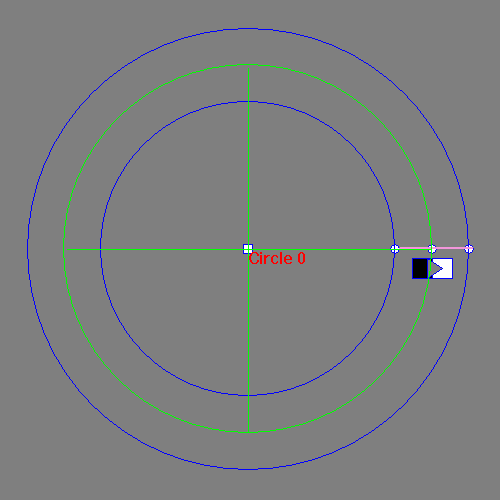
1.2.2圆工具摆放
利用鼠标拖放圆工具至合适的位置,鼠标操作修改圆工具的测量属性,这样方便地完成了圆工具的摆放。
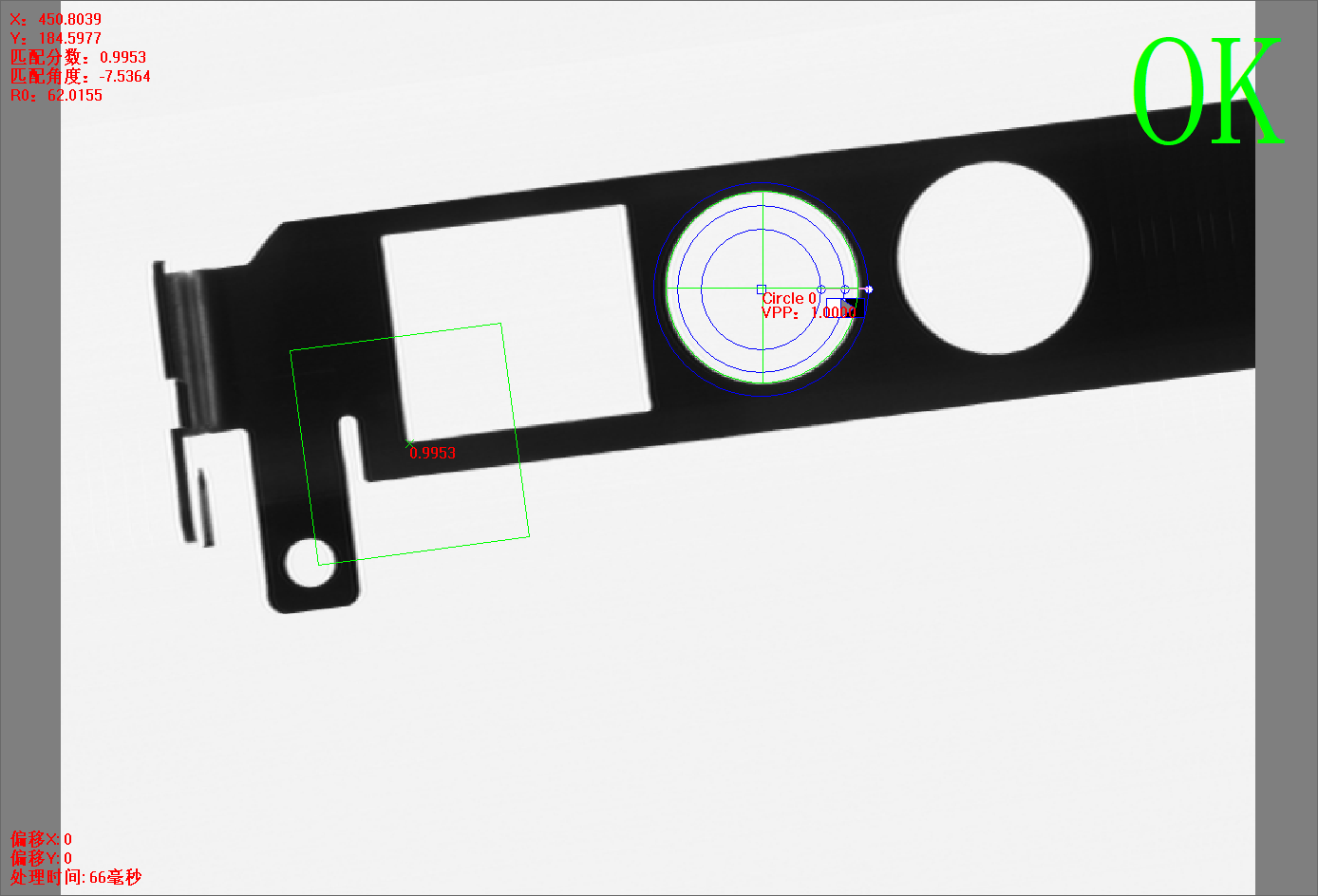
1.3学习
点击【方法学习】后,灰度匹配+圆心 方法的所有信息将被保存,并自动进行图像处理,相关的信息将显示。
2.灰度匹配的参数设置
点击【高级参数】进入参数设置界面。
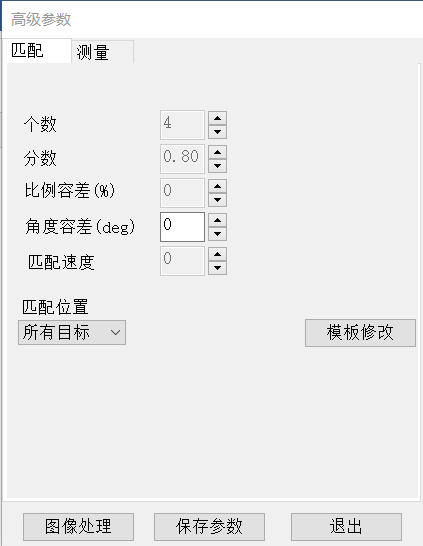
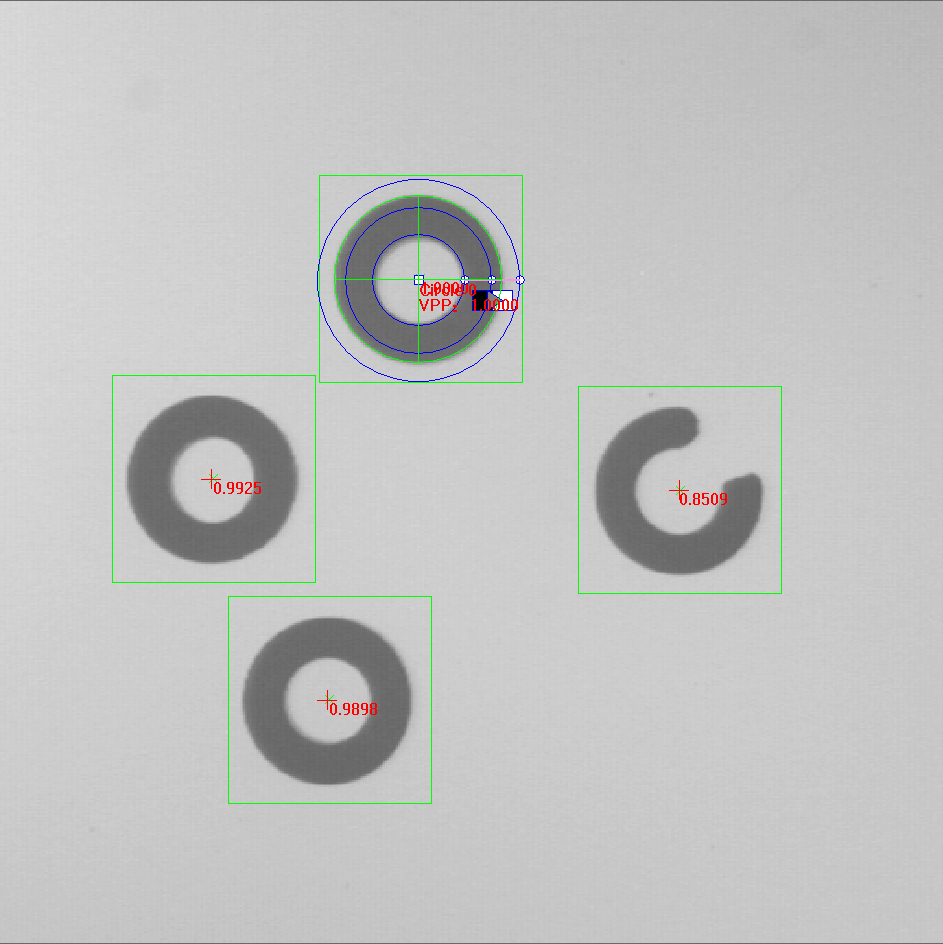
2.1个数
图像中存在多个目标时,设置【个数】,即可返回多个目标。
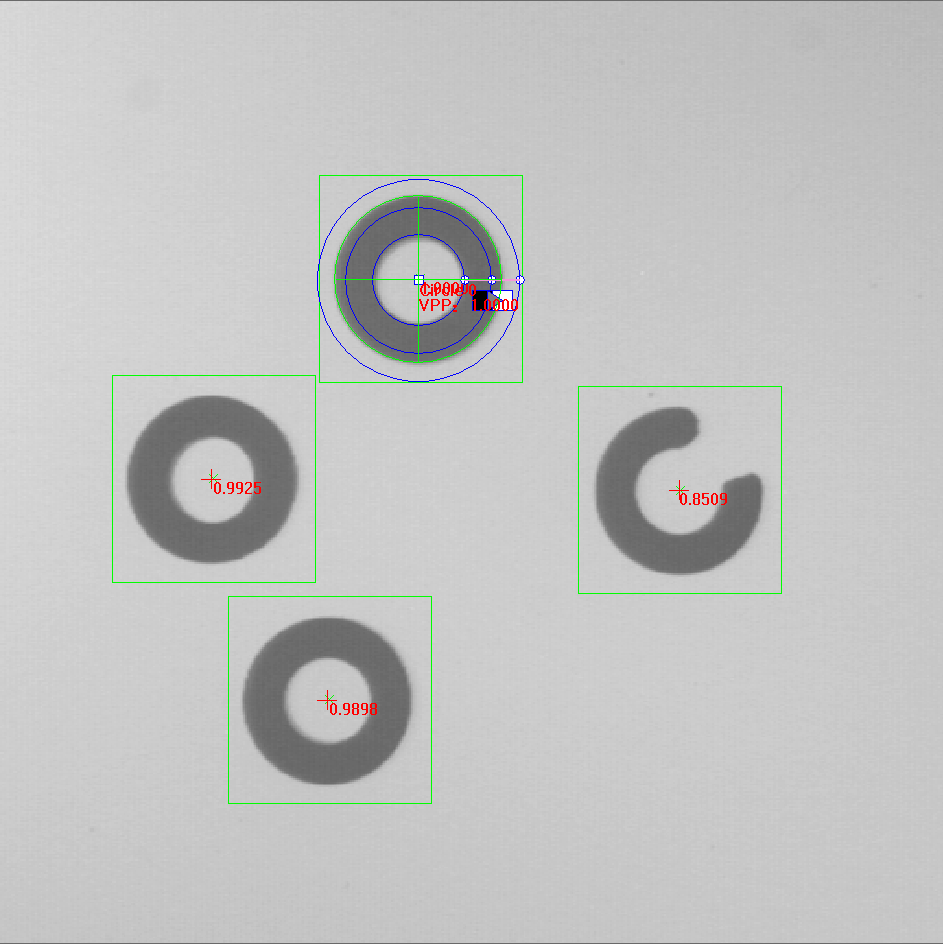
个数:1 个数:4
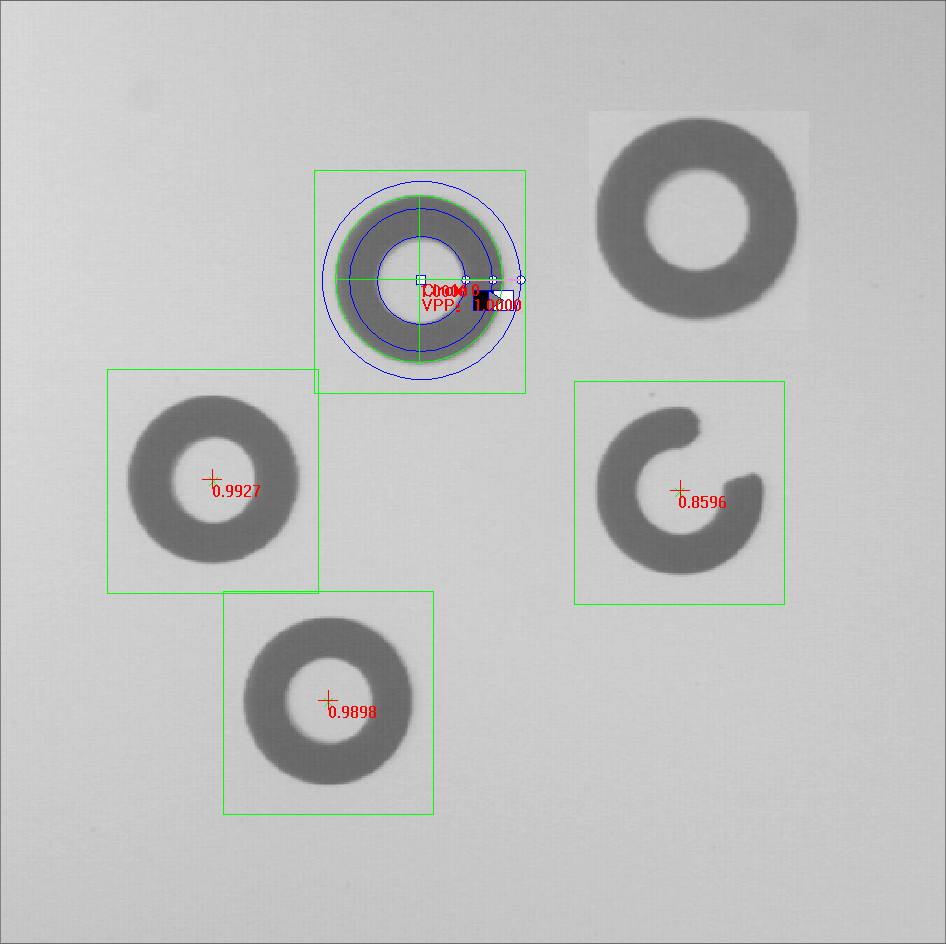
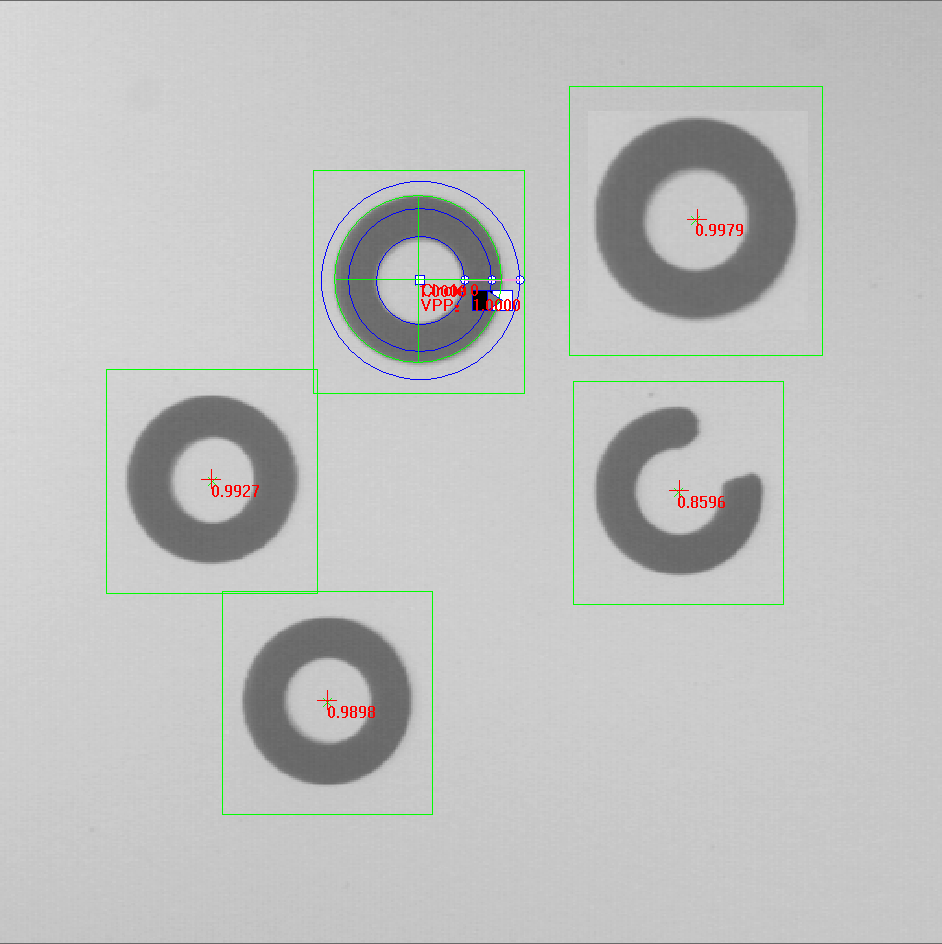
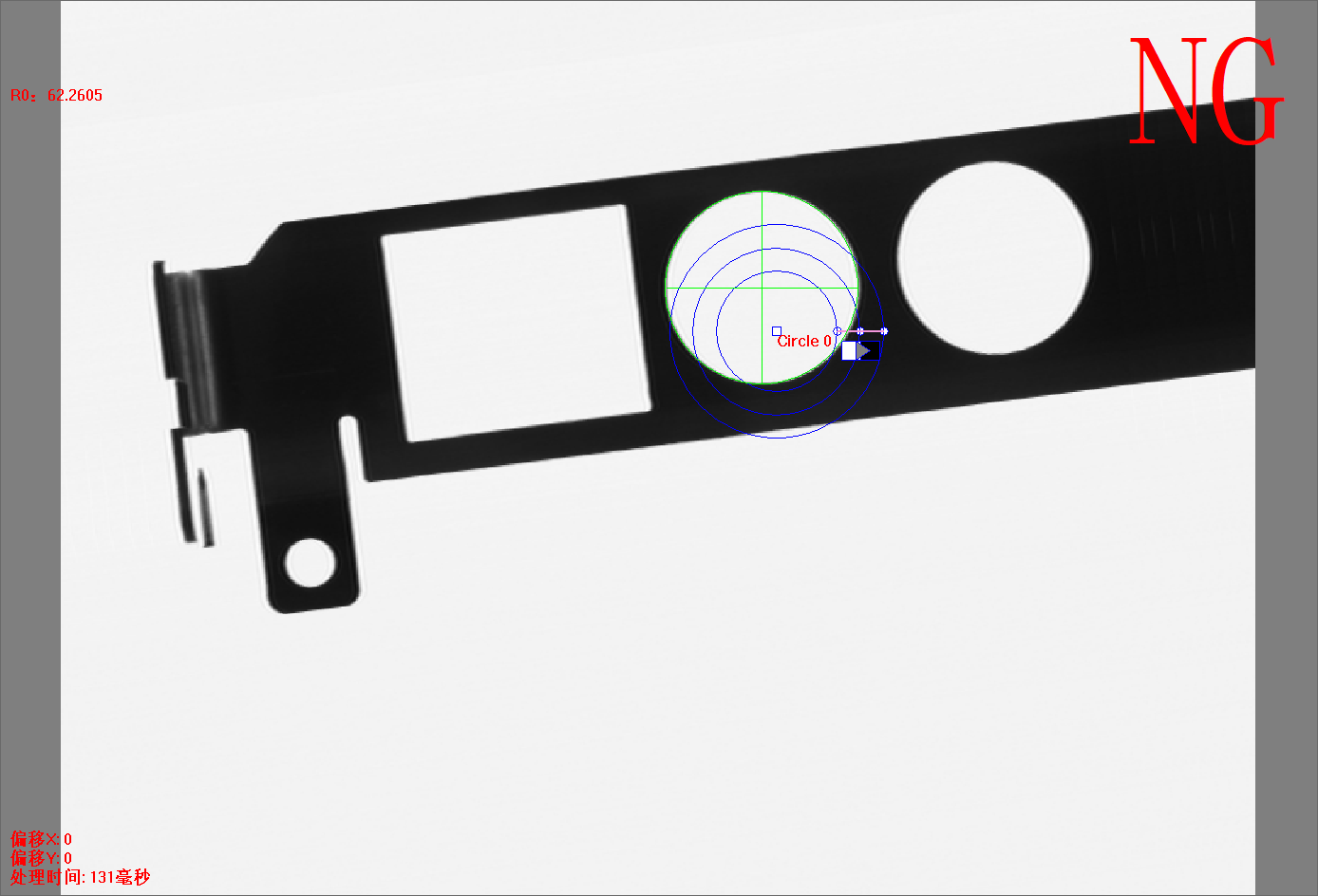
2.2分数
目标与模板间的相似度分数。分数越高,表示目标与模板越相似。分数在设置值之下的目标,将会被剔除。(请观察下面图中,每个目标的分数)
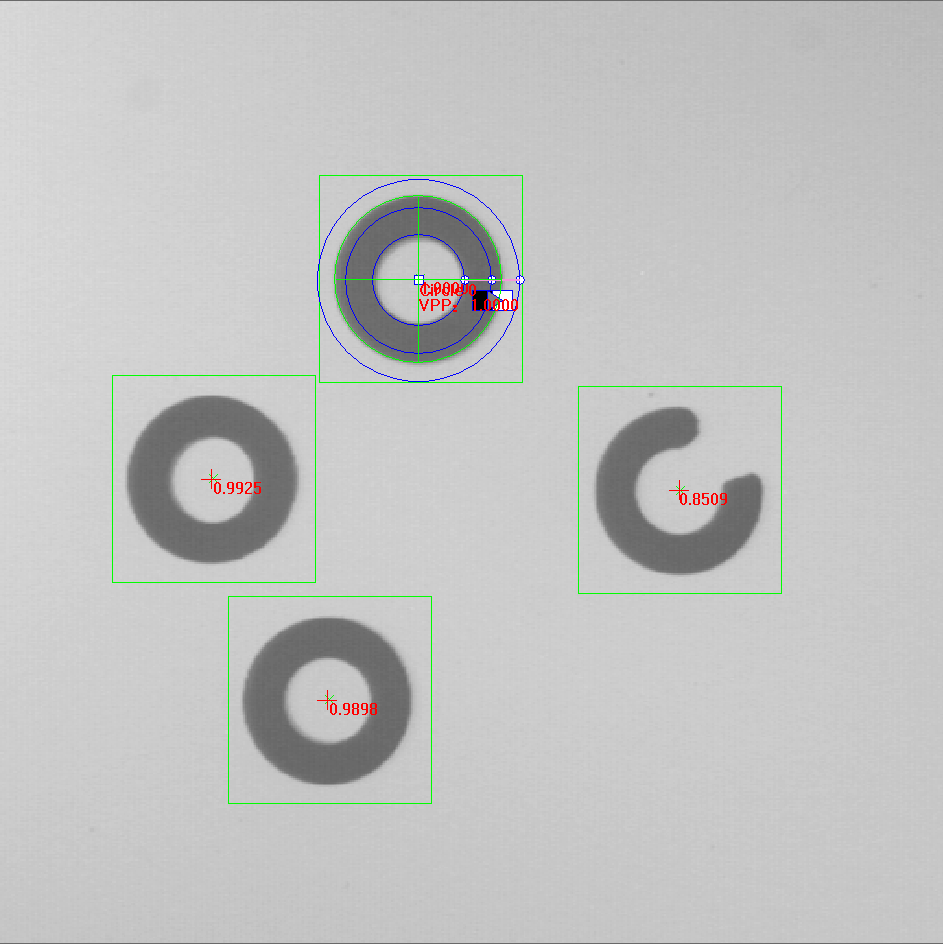
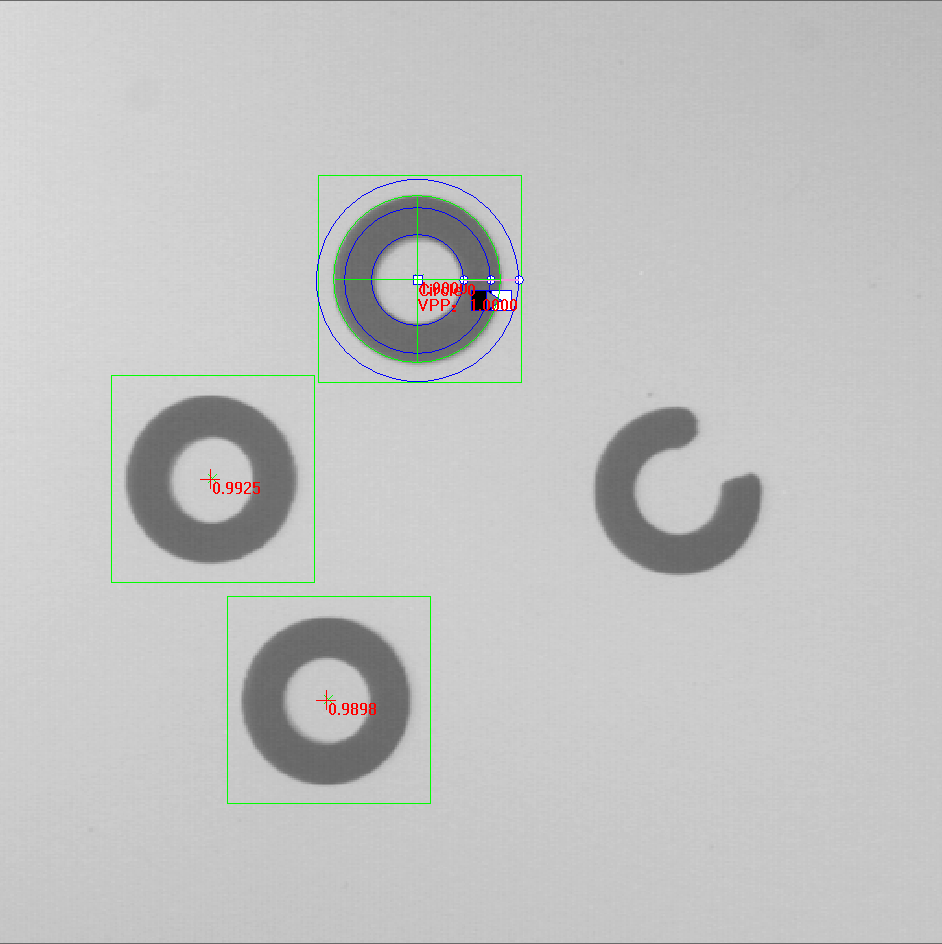
分数:0.8 分数:0.9
2.3比例容差
目标与模板的大小比例变化时,设置合适的比例容差,即可寻找大小变化的目标。
比例容差:0% 比例容差:25%
2.4角度容差
图像中的目标发生角度变化,设置角度容差,即可更好地寻找角度发生旋转的目标。
举例:
在目标未旋转前进行图像学习并处理
当目标发生旋转后:
角度容差:0 deg 角度容差:30 deg
2.5匹配速度
【灰度匹配】暂未支持该功能。
2.6匹配位置
该参数提供了返回目标的辅加选项,可根据以下选项返回目标数据。
【所有目标】:返回所有的目标
【分数最大】:返回所有目标中分数最大的目标
【最左边的】:返回所有目标中位置最左边的目标
【最右边的】:返回所有目标中位置最右边的目标
【最上边的】:返回所有目标中位置最上边的目标
【最下边的】:返回所有目标中位置最下边的目标
举例:
所有目标 最左边的
2.7模板修改
【灰度匹配】暂未支持该功能。
3.圆工具的参数设置
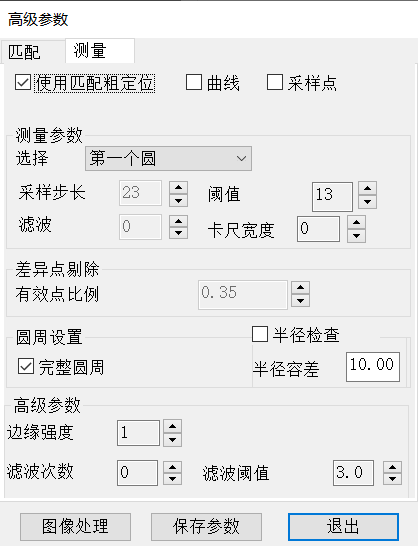
【使用匹配粗定位】:勾选后圆工具跟随匹配位置改变,否则圆工具将在固定位置。
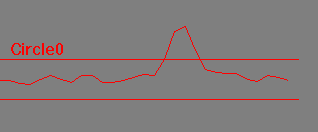
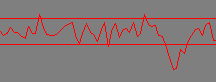
【曲线】:勾选后,在图像区域绘画出寻找路径上的变化情况,观察曲线与阈值线的关系,有助于设置【阈值】参数。
【采样点】:勾选后,绘画出测量到的采样点,观察采样点的分布情况,可助于设置参数。
3.1选择
该参数提供按位置选择的拟合圆结果。
第一个圆 第三个圆
3.2采样步长
该参数设置测量点的个数(卡尺个数)。
3.3阈值
高于该参数值的边缘点将会添加到拟合圆的点集中。结合【曲线】有助于设置该参数。
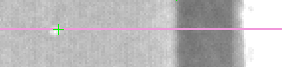
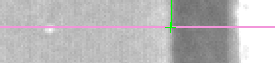
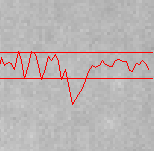
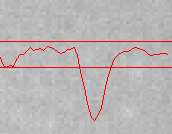
左图中粉色直线为测量路径,右图是对应的曲线。
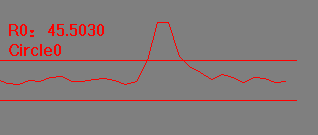
测量的路径 曲线(红线为阈值)
3.4滤波
粉色为一条测量路径,该参数过滤测量路径上的干扰点。
滤波:2 滤波:8
3.5卡尺宽度
粉色为一条测量路径,该参数调整使粉色路径范围加宽,如下图所示。当路径上有干扰点,调整卡尺宽度可有效抗干扰。
卡尺宽度0 对应的曲线
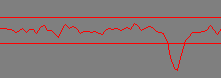
卡尺宽度5对应的曲线
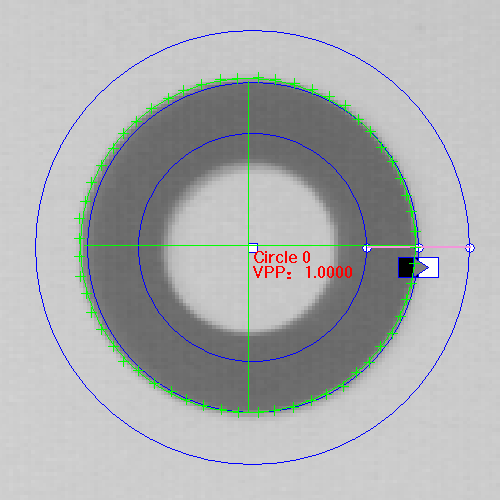
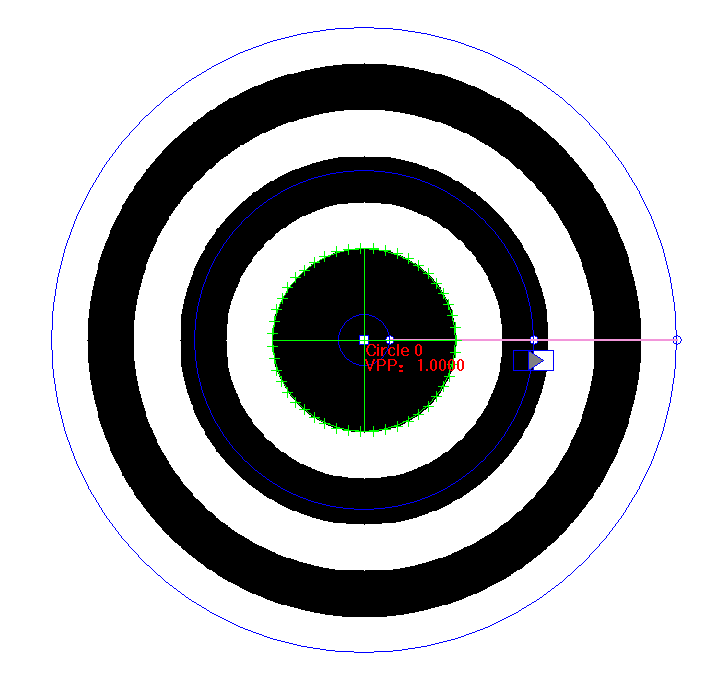
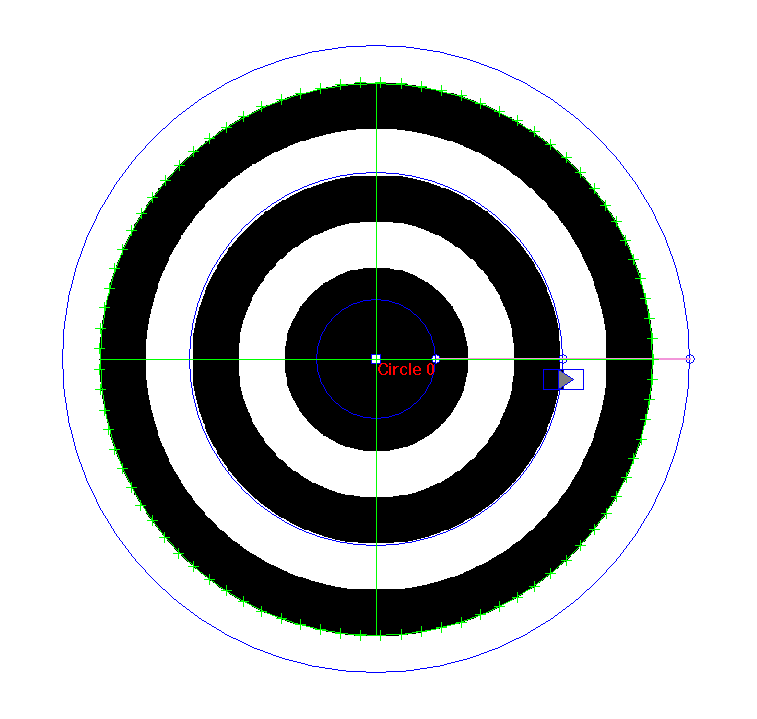
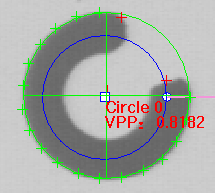
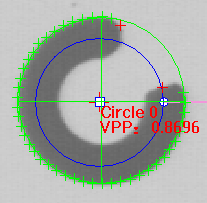
3.6有效点比例
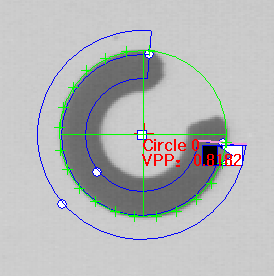
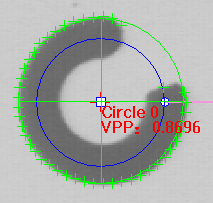
该参数表示参与拟合圆的有效点数量占总测量路径数量的百分比。由于边缘残缺或部分边缘点被剔除等情况,使得参与拟合圆的边缘点数目减少,但不能低于该参数值,否则测量失败。下图中,有效点比例VPP:0.8182
3.7完整圆周
该选项可实现测量任意的圆弧,直接地避开残缺或不可靠边缘范围,提高测量的稳定性。圆弧工具的鼠标操作与完整圆相似。
3.8半径检查
当记录圆半径的基准值后,勾选该选项,可在图像处理过程中检查圆的半径。半径容差单位为像素。
3.9边缘强度
当边缘模糊时,可有效增强边缘的强度,同时起到抗干扰的作用。
![]()
测量路径
边缘强度:1 边缘强度:4
3.10滤波次数、滤波阈值
这两个参数是组合使用的,它们起到剔除差异点的作用,提高拟合圆的准确性。
【滤波次数】指执行剔除差异点的次数,强的差异点可能要执行多次才被剔除。
【滤波阈值】留下的有效边缘点到拟合圆周的平均距离。
滤波次数:0 滤波次数:1




 投诉建议
投诉建议
提交
WiseAlign视觉对位软件提示系统校准时间错误解决方案
MasterAlign视觉对位软件提示系统校准时间错误解决方案

MasterAlign全景视觉引导应用
MasterAlign模切视觉应用软件说
MasterAlign智能穿戴视觉应用说明