激光位移传感器可精确非接触测量被测物体的位置、位移等变化,主要应用于检测物体的位移、厚度、振动、距离、直径等几何量的测量。
按照测量原理,激光位移传感器原理分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量,下面分别介绍激光位移传感器原理的两种测量方式。
激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和激光位移传感器之间的距离,数字信号处理器就能计算出激光位移传感器和被测物体之间的距离。同时,光束在接收元件的位置通过模拟和数字电路处理,并通过微处理器分析,计算出相应的输出值,并在用户设定的模拟量窗口内,按比例输出标准数据信号。如果使用开关量输出,则在设定的窗口内导通,窗口之外截止。另外,模拟量与开关量输出可独立设置检测窗口。
采取三角测量法的激光位移传感器最高线性度可达1um,分辨率更是可达到0.1um的水平。比如ZLDS100类型的传感器,它可以达到0.01%高分辨率,0.1%高线性度,9.4KHz高响应,适应恶劣环境。 激光位移传感器采用回波分析原理来测量距离以达到一定程度的精度。传感器内部是由处理器单元、回波处理单元、激光发射器、激光接收器等部分组成。激光位移传感器通过激光发射器每秒发射一百万个激光脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回至接收器所需的时间,以此计算出距离值
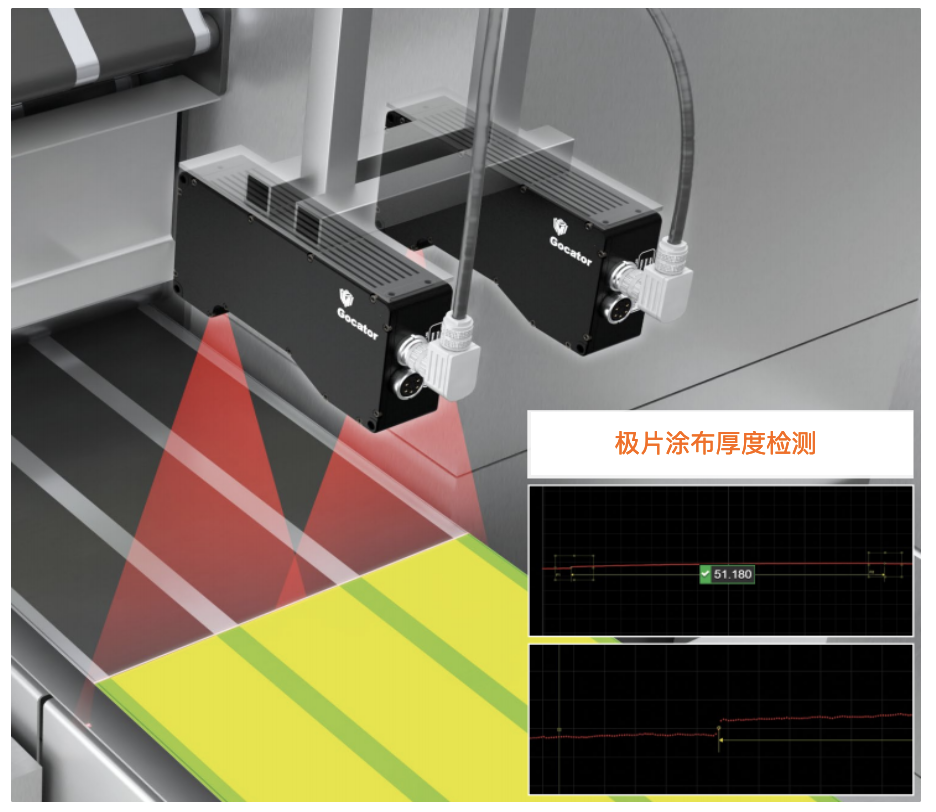
二、3D线激光轮廓传感器采用激光三角反射原理。首先使用一束激光照射到被测物体表面,反射光经过光学透镜组在感光元件表面形成光斑,不同高度的表面反射形成的光斑位置各不相同。如下图所示,当被检测表面偏高时,测量激光光斑位置会右移;反之,如果被检测表面偏低时,测量激光光斑位置会左移。3D线激光轮廓传感器采用的不是点激光光源,而是一条激光线,测量光激光斑也是一条线,所以俗称线激光。线激光还可以面扫描,快速形成3D轮廓。
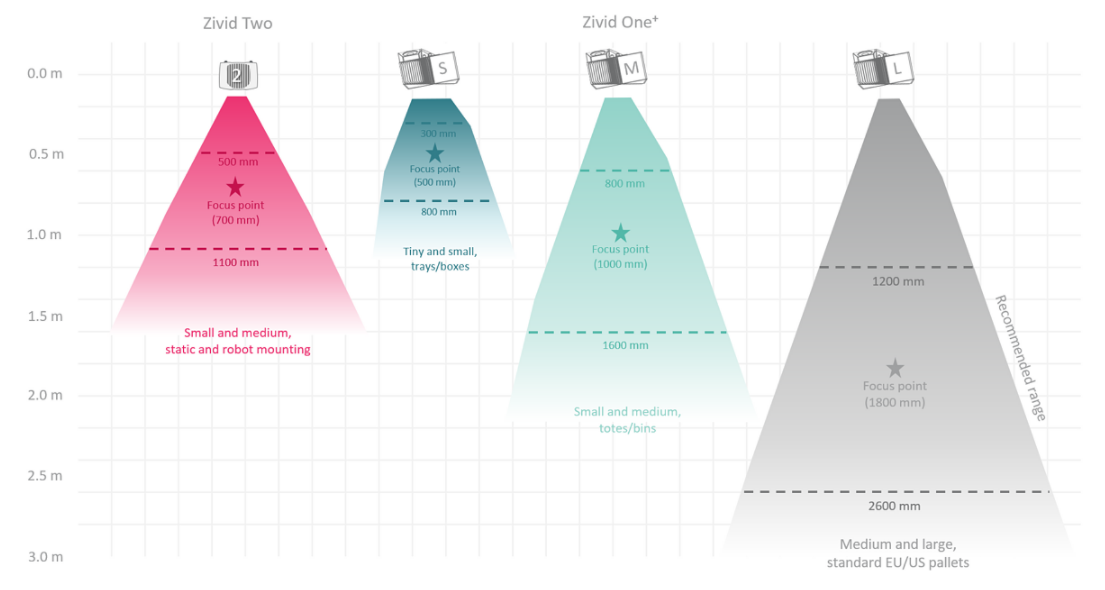
三、激光位移传感器,是位移传感器中的一种,适用于长距离检测,因而逐渐取代了拉线位移传感器,在工业自动化、交通、钢铁 、建筑、码头等需要进行自动距离位移测量和位置控制中应用。它可以快速、准确的测量到目标地距离,测量结果可以通过各种接口传输到设备上,以便进行检测、控制等应用,同时激光位移传感器的控制也可通过计算机或其他与其相连的设备来完成。
激光位移传感器可以测量位移、厚度、振动、距离、直径等精密的几何测量。激光有直线度好的优良特性,同样激光位移传感器相对于我们已知的超声波传感器有更高的精度。但是,激光的产生装置相对比较复杂且体积较大,因此会对激光位移传感器的应用范围要求较苛刻。
激光位移传感器原理
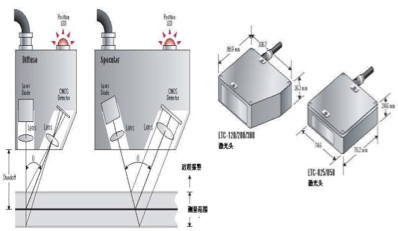
一般激光位移传感器采用的基本原理是光学三角法:半导体激光器①被镜片②聚焦到被测物体⑥。反射光被镜片③收集,投射到CMOS阵列④上;信号处理器⑤通过三角函数计算阵列④上的光点位置得到距物体的距离。
按照测量原理, 激光位移传感器分为激光三角测量法和激光回波分析法, 激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量,下面分别介绍激光三角测量原理和激光回波分析原理。
1.激光位移传感器原理之激光三角测量法原理
激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出激光位移传感器和被测物体之间的距离。
同时,光束在接收元件的位置通过模拟和数字电路处理,并通过微处理器分析,计算出相应的输出值,并在用户设定的模拟量窗口内,按比例输出标准数据信号。如果使用开关量输出,则在设定的窗口内导通,窗口之外截止。另外,模拟量与开关量输出可独立设置检测窗口。
采取三角测量法的激光位移传感器最高线性度可达1um,分辨率更是可达到0.1um的水平。比如ZLDS100类型的传感器,它可以达到0.01%高分辨率,0.1%高线性度,9.4KHz高响应,适应恶劣环境。
2.激光位移传感器原理之激光回波分析原理
激光位移传感器采用回波分析原理来测量距离以达到一定程度的精度。传感器内部是由处理器单元、回波处理单元、激光发射器、激光接收器等部分组成。激光位移传感器通过激光发射器每秒发射一百万个激光脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回至接收器所需的时间,以此计算出距离值,该输出值是将上千次的测量结果进行的平均输出。即所谓的脉冲时间法测量的。激光回波分析法适合于长距离检测,但测量精度相对于激光三角测量法要低,最远检测距离可达250m。
激光位移传感器因为是发射激光来进行检测的,所以在使用过程中有很多事项需要注意,如下:
1、对准太阳或其它强光物体测量会产生错误结果;
2、在强反射环境中测量较差反射表面的物体也会产生错误结果;
3、量强反射表面会产生错误结果;
4、透过透明物测量,如玻璃、光学滤光器、树脂玻璃,会产生不正确数据;
5、迅速改变测量环境也会产生假数据。
四、线状激光三角测距原理:
将激光光条的中心点P1、成像点P1′、摄像头、激光头作为基准面,中心点P1就符合单点结构光测距。对于任一点(该点不在基准面上),也可由三角测距得出。将激光光条的中心点P1、成像点P1′、摄像头、激光头作为基准面,中心点P1就符合单点结构光测距。对于任一点(该点不在基准面上),也可由三角测距得出。
五、传统的激光三角法基本原理如图2.4所示,采用直射型,光电探测器采用的是CCD,当散射光通过成像透镜时,如果将CCD以垂直于激光束入射的位置进行安装耦合,则成像到CCD上的光点会由于没有完全聚焦而出现弥散斑,测量并不完全。
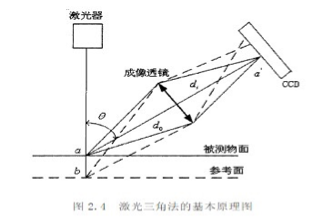
于是为了光点所成的像在接收器表面上每一点都清晰,则要求透镜光轴与接收面之间必须形成一定的夹角,所以我们选用CCD接收器为倾斜式的方式,即完全聚焦的激光三角法测量,如图2.5所示。
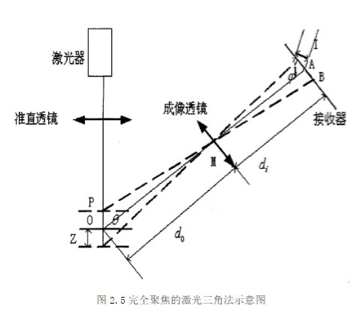
图中PO为入射光源,光线经准直透镜后垂直入射到物体表面,反射后经过成像透镜中心点M成像在CCD接收面上,入射光PO与反射光以的夹角为θ,反射光OA与CCD成像平面的夹角为φ,P点成像于CCD平面上的B点,O点成像于CCD平面上的A点,由图中可知,P点与O点高度不同,所成的像投射到光敏面上的位置也是不同的,设O点所在平面为基准面,A为CCD成像平面上的成像基准点,则光线PO上的点与CCD平面上的投影点是一一对应的。因此,只要知道光线PO上的任何一点在CCD成像面上的位置就可以求出该点的高度信息。由图2.5,可列出以下关系式


式中:
PO一一物点的高度信息;
AB一一P点在CCD成像平面的成像点与成像基准点A的偏移量;
OM一一O点成像PO物距;
MA一一O点成像像距;
激光束垂直投射到被测物面,所形成的漫反射光斑作为传感信号,用透镜成像将收集到的漫反射光会聚到像平面的光接收器上形成像点。当被测物面移动时,入射光斑也会随之移动,像点也会在光接收面上做相应的移动,根据像移大小和系统结构参数可以确定被测物面的位移量,从而还可以获取其它方面信息。本系统中,为使光接收器上的像点不存在盲点,光接收器的光敏面必须与成像光轴成一夹角φ。这样既可以保证入射光斑与其像斑位移具有的关系精确,还可以使成像点最小,有利于提高测量精度。同时为了提高测量精度,φ和θ必须满足沙姆。
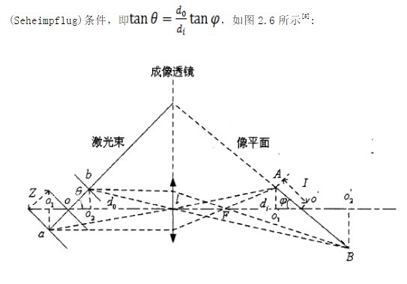
图2.6物一像位移轨迹图
图中d0为基准点的物距,di为基准点的象距,O’为O经成像透镜的像点,A、B分别为a、b经成像透镜的像点,θ为光入射角, 为成像角,l为成像透镜,焦距为F。
当激光光束照射到a点时,由图3.7可知:

综合上面可得,
式中,符号“+”对应于图2.6由o移至b,符号“─ ”对应物面由o移至a。 式中,符号“+”对应于图2.6由o移至a,符号“─ ”对应物面由o移至b。
由Z-I关系公式可得Z-I关系曲线,图2.7所示。从图中可以看出I该曲线为非线性曲线,只有当物面在O点附近较小范围移动时,上述曲线可近似按线性关系处理。





 投诉建议
投诉建议