


在自动化码头中CANopen与Ethercat协议的应用
在自动化码头中,协议转换是一个关键环节,它能够实现不同设备之间的数据交互和协同工作。其中,将CANopen协议转换为EtherCAT协议的应用尤为常见。我们来了解一下CANopen和EtherCAT这两种协议。CANopen是一种基于CAN总线的通讯协议,被广泛应用于工业自动化领域,尤其是在运动控制和传感器通信方面。而EtherCAT是一种实时以太网通讯协议,具有高速、高可靠性和高扩展性的特点,被广泛应用于现代工业自动化系统的主从站通讯。  在自动化码头中,各种设备如起重机、输送带、堆垛机等需要通过统一的通讯协议进行协同工作。然而,由于这些设备的控制器可能采用不同的通讯协议,因此需要进行协议转换。将CANopen转换为EtherCAT可以使得采用CANopen协议的设备能够与采用EtherCAT协议的设备进行无缝连接,从而实现整个码头的协同工作。
在自动化码头中,各种设备如起重机、输送带、堆垛机等需要通过统一的通讯协议进行协同工作。然而,由于这些设备的控制器可能采用不同的通讯协议,因此需要进行协议转换。将CANopen转换为EtherCAT可以使得采用CANopen协议的设备能够与采用EtherCAT协议的设备进行无缝连接,从而实现整个码头的协同工作。  具体来说,这种转换可以通过专用的转换器或网关来实现。转换器或网关需要具备CANopen和EtherCAT两种协议的处理能力,能够将接收到的CANopen数据转换为EtherCAT数据,或者将EtherCAT数据转换为CANopen数据。通过这种方式,可以实现不同设备之间的数据交互和协同工作,提高自动化码头的整体效率和可靠性。
具体来说,这种转换可以通过专用的转换器或网关来实现。转换器或网关需要具备CANopen和EtherCAT两种协议的处理能力,能够将接收到的CANopen数据转换为EtherCAT数据,或者将EtherCAT数据转换为CANopen数据。通过这种方式,可以实现不同设备之间的数据交互和协同工作,提高自动化码头的整体效率和可靠性。  需要注意的是,在实际应用中还需要考虑协议转换的性能和实时性。由于自动化码头的设备数量较多,且需要进行高速、实时的数据传输,因此需要保证转换器的处理能力和实时性能够满足实际需求。同时,还需要考虑转换器的可扩展性和稳定性,以满足未来自动化码头的发展需求。
需要注意的是,在实际应用中还需要考虑协议转换的性能和实时性。由于自动化码头的设备数量较多,且需要进行高速、实时的数据传输,因此需要保证转换器的处理能力和实时性能够满足实际需求。同时,还需要考虑转换器的可扩展性和稳定性,以满足未来自动化码头的发展需求。




 投诉建议
投诉建议
提交

开疆智能KJ-PBG-006/Modbus TCP转Profibus网关

开疆智能KJ-PBG-003/RS485转Profibus网关

开疆智能KJ-PBG-005/CanOpen转Profinet网关

开疆智能 RS485转Profibus网关
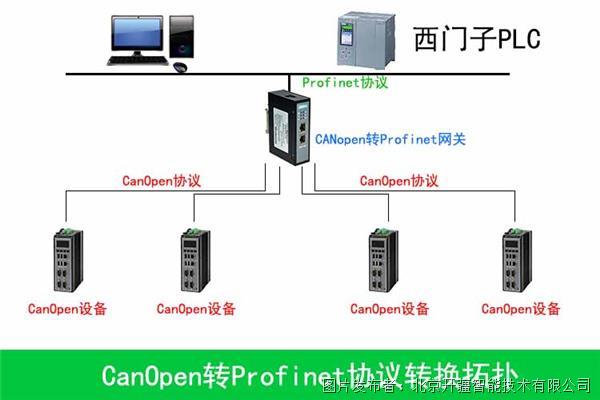
解锁工业自动化:通过CANopen转Profinet的无缝对接