SP30 Delta 工业机器人
供稿:北京安培通科技有限公司

关键字:SP30,Delta,工业机器人
- 产品简介:
- Delta机器人又名并联机器人,具有3个空间自由度和1个转动自由度,通过示教编程或视觉系统捕捉目标物体,由三个并联的伺服轴确定抓具中心(TCP)的空间位置,实现目标物体的快速拾取、分拣、装箱、搬运、加工等操作。主要应用于乳品、食品、药品和电子产品等行业,具有重量轻、体积小、速度快、定位精、成本低、效率高等特点。
产品介绍
SP30 Delta 工业机器人

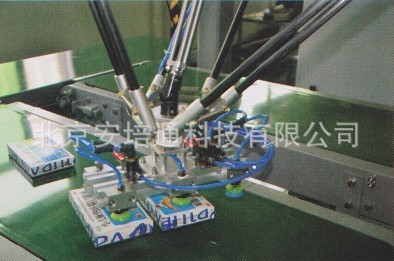
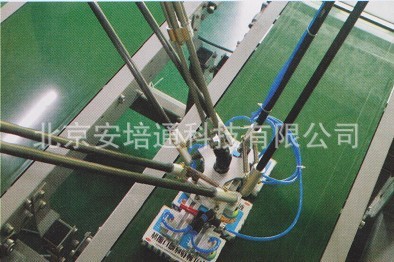
应用领域:
拾料 分拣 搬运 包装 装配
Delta机器人又名并联机器人,具有3个空间自由度和1个转动自由度,通过示教编程或视觉系统捕捉目标物体,由三个并联的伺服轴确定抓具中心(TCP)的空间位置,实现目标物体的快速拾取、分拣、装箱、搬运、加工等操作。主要应用于乳品、食品、药品和电子产品等行业,具有重量轻、体积小、速度快、定位精、成本低、效率高等特点。
Delta机器人特点:
Delta机器人是典型的空间三自由度并联机构,整体结构精密、紧凑,驱动部分均布于固定平台,这些特点使它具有如下特性:
承载能力强、刚度大、自重负荷比小、动态性能好;
并行三自由度机械臂结构,重复定位精度高;
超高速拾取物品,一秒钟多个节拍。
Delta机器人应用系统:
Delta机器人应用系统主要由三个部分组成:机器人、输送线及机器人安装框架。
机器人由基板、电机罩、旋转轴、主机械臂、副机械臂、抓具中心等组成。
工作范围:
Delta机器人的工作范围由主机械臂及副机械臂的长度、动平台与静平台半径,以及主动臂活动角度范围这几个参数来确定,以负载为3公斤的Delta机器人工作范围为例,如下图所示。
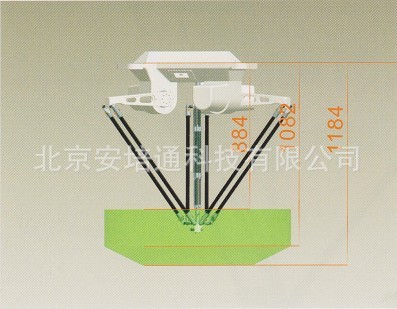

颜色标记区域=实际工作范围
圆柱内最大工作空间。工作空间可按x-y-z坐标缩小
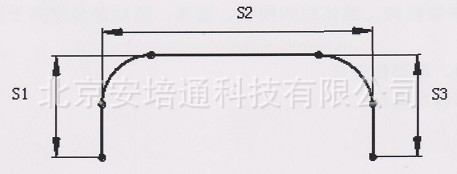
运动轨迹:
Delta机器人基本的运动轨迹如下图,有S1、S2、S3构成门字形的三部分轨迹组成,分别为拾取、平移、放置三个阶段。
Delta机器人进行抓取目标工件时主要以走门字形运动轨迹,也可根据不同的应用要求,规划不同的运动轨迹。
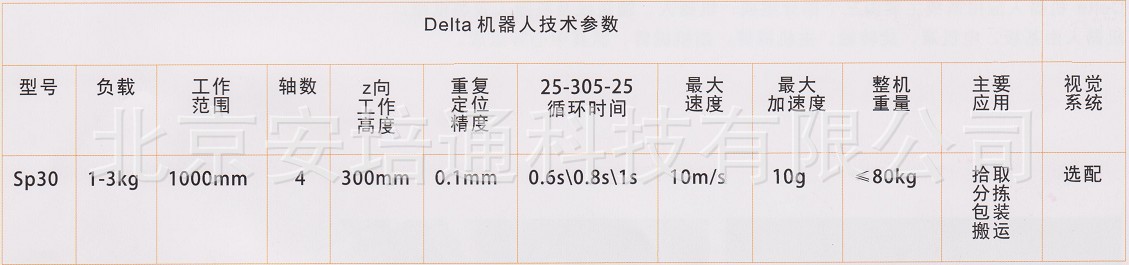
技术参数: