


MOTEC伺服与运动控制在太阳追踪控制系统的应用
- 关键词:太阳追踪控制系统,追日控制系统,光伏发电跟踪系统
- 摘要:该控制系统主要针对集热器测试系统中集热器转台跟踪太阳方位角、高度角。 控制系统根据计算的太阳轨迹,每隔几秒钟发送位置指令给驱动器,实现方位角和俯仰角的调整。机械末端安装有编码器,检测实际角度,如果实际角度没有达到,控制系统计算出偏差后在进行校正。日落后,跟踪系统停止工作,并返回到初始位置,第二天继续跟踪。
0 概述
该控制系统主要针对集热器测试系统中集热器转台跟踪太阳方位角、高度角。
控制分手操控和自动控两种方式:
自动方式:自动跟踪方式主要完成的功能是根据当地的地理位置和时间,利用天文学公式计算的到跟踪器的方位角和俯仰角,并由此控制方位电机和俯仰电机。跟踪器每10秒做一次跟踪计算以修正方位角和俯仰角。
手动模式:通过手操盒控制方位电机和俯仰电机
1 追踪原理
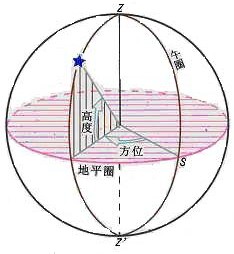
图一 地平坐标系
根据球面三角形的余弦定律可求得太阳的高度角和方位角:
高度角 α=arcsin(sinΦsinδ+cosΦcosδcosω)
方位角 β=arcsin(cosδcosω/cosα)
式中:Φ 当地纬度
δ 太阳赤纬角
ω 太阳时角
由坐标计算公式可知,太阳轨迹位置只由观测点的地理位置和标准时间来确定。初始化安装时,俯仰轴和方位轴的初始位置和地理南北线重合,指向北方,通过水平校准仪器使设备底座保持水平。在应用中,全球定位系统可为系统提供精度很高的地理经纬度和当地时间,控制系统则根据提供的地理、时间参数确定太阳的实时位置,以保证系统准确定位和跟踪的高准确性和高可靠性。控制系统根据计算的太阳轨迹,每隔几秒钟发送位置指令给驱动器,实现方位角和俯仰角的调整。机械末端安装有编码器,检测实际角度,如果实际角度没有达到,控制系统计算出偏差后在进行校正。日落后,跟踪系统停止工作,并返回到初始位置,第二天继续跟踪。
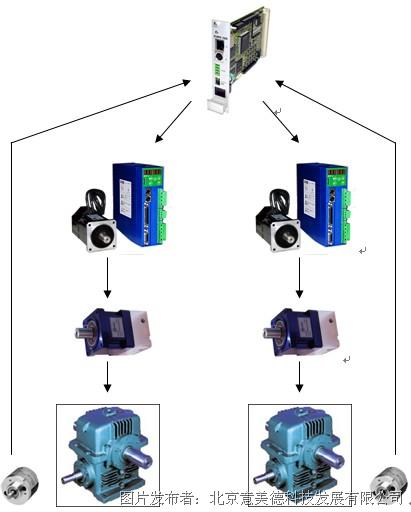
3 系统示意图
4 设备图片

发布时间:2012年7月31日 9:54 人气:
更多内容请访问(北京意美德科技发展有限公司)