


基于 PC 的控制技术在搬运、生产和装配机器人中的应用
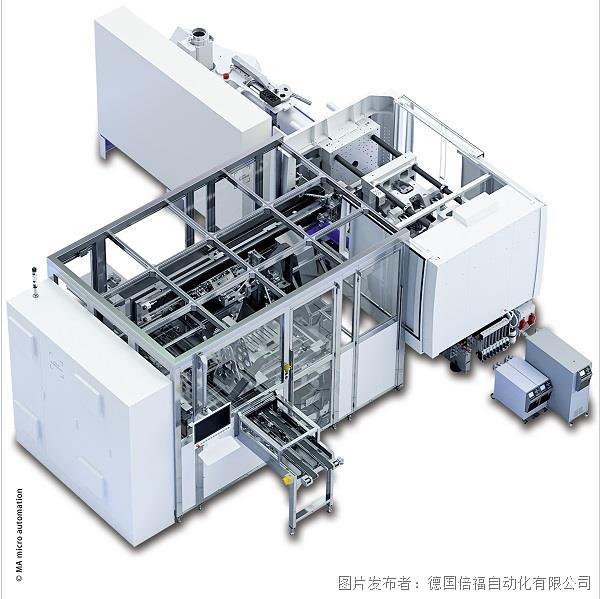
[2008 年 07月 04日,德国]拱架机器人、SCARA 机器人、关节型机器人或并联机器人 – 仅需一个自动化平台即可实现任何加工步骤。采用 Beckhoff 基于 PC 的控制技术,可以控制并监视各加工机械和整个生产线的所有工艺流程: 进料、封接(焊接、粘合等)、装配、检验、搬运和堆垛。
具有高度重复性的高动态处理设备需要这样一个系统,该系统能够确保所有子流程(包括物理信号采样、运动控制器中的处理和对物理输出的响应)的延迟最低。Beckhoff 能够为您提供所需的产品和技术: 高性能工业 PC 和嵌入式 PC、控制面板和显示元件、高速紧凑型 I/O 组件(防护等级 IP 20 或 IP 67)、超高速 EtherCAT 开放式通讯系统、多功能伺服驱动技术 、经济高效的步进电机技术以及 TwinCAT PLC 和运动控制软件。
采用 Beckhoff TwinSAFE 技术可确保具体应用中功能安全性。安全 I/O 组件和集成在驱动中的安全功能通过安全通讯协议连接到安全逻辑端子模块中,从而确保系统的安全运行。
TwinCAT: 持续发展的基于 PC 的控制技术
通过基于 PC 的控制系统,Beckhoff 已经创造了一系列标准,以满足不同行业的各种需求。这就需要研发出一种统一的、能够全面升级的开放式系统。这种在软件和硬件接口方面的开放性使得机械制造商能够对他们的系统进行调整,以迎合多样性和多变性需求,无需一再花费高额的实施成本和人力成本。
TwinCAT 集成了 PLC 和运动控制功能,以高性能控制加工机械的各个工艺步骤。软 PLC 编程符合国际 IEC 61131-3 标准。可提供种类繁多的软件模块以用于不同的任务,例如凸轮、多轴同步和插补运动。
由于在主/从轴和高性能、多样化运动控制功能的组合选择方面具有高度灵活性,因此可以执行针对不同应用领域的解决方案。功能强大的软件工具(如 TwinCAT 凸轮设计工具和 TwinCAT ScopeView)支持系统设计和调试。PLC 程序库中的运动控制功能块是基于 PLCopen运动控制标准的,这简化了编程工作,允许使用标准化的组件。
EtherCAT:多轴系统最高性能的保证
超高速过程通讯的基础是 EtherCAT 工业以太网系统,它非常适用于加工机械。控制器与I/O 信号之间的快速通讯 – 无需特殊硬件 – 为机械制造商提供超乎想象的可能性: 多轴运动控制通过分布式 EtherCAT 时钟进行同步,可精确到纳秒。
采用 Beckhoff 的 XFC 技术(极速控制技术),任何一个程序员都可通过标准组件轻松实现专用加工机械超高速高精度控制解决方案。
_4096.jpg)
_7509.jpg)
关于德国倍福
德国倍福(BECKHOFF)自动化有限公司总部位于德国威尔市。公司在世界各地设有分支机构,加上全球的合作伙伴,目前公司业务已遍及60多个国家。
倍福始终以基于PC的自动化新技术作为公司的发展理念,所生产的工业电脑、现场总线模块、驱动产品和TwinCAT控制软件构成了一套完整的、相互兼容的控制系统,可为各个工控领域提供开放式自动化系统和完整的解决方案。近20年来,倍福的元件和系统解决方案在世界各地得到了广泛的应用,以其“自动化新技术”为工业自动化的所有领域创立了一个标准。
自2001年3月倍福成立北京代表处以来,公司在中国的业务迅速发展,先后成立了上海代表处和广州代表处。随着各种具有良好性价比的新产品、新技术不断进入中国市场,其勇于打破传统控制模式,倾力推广PC控制新技术的理念已被越来越多的中国用户所接受。如需了解更多信息,请登陆 Beckhoff 中文官方网站http://www.beckhoff.com.cn 。




 投诉建议
投诉建议
提交

Beckhoff Vision:自主设计硬件产品系列与TwinCATVision相辅相成

倍福 XTS 磁驱柔性输送系统助力粉针剂包装设备性能更上层楼

EtherCAT 20年:成功秘诀是技术领先、生态繁荣
单电缆解决方案助力提升模块化机械制造效率
兼容、开放的 EtherCAT 技术已经过 20 年的实践验证