


TwinCAT 3:适用于机器人技术的 eXtended Automation 技术
2012 慕尼黑国际机器人及自动化技术贸易博览会(Automatica)将于 5 月 22 日至 25 日在德国慕尼黑举行,Beckhoff 将在此次展会上展示其全系列针对机器人技术、装配、处理、控制、安全和驱动应用的解决方案。其中,TwinCAT 3 软件将是 Beckhoff 此次展出的亮点产品。TwinCAT 3 为科技自动化提供了理想的平台,即用最新的软件组件对基于 PC 的控制技术进行进一步拓展。在众多的优点中,最突出的就是机器人组件易于集成到整个控制系统中,从而最大限度地减少添加独立机器人控制器的需要。无需专用的机器人技术工具和语言即可全面集成到 TwinCAT 3 中可以显著降低工程成本。
科技自动化使得处理器能力得到了充分利用,特别是支持多核技术,因此可以通过新的组件对传统的基于 PC 的自动化应用进行拓展。不仅仅是测量技术和状态监测,机器人技术也可以集成到标准控制系统中。机器人技术和运动控制功能可以完美结合在一起,并可以在同一个平台上进行同步,以实现最佳性能。

降低工程成本: 配置、参数化和诊断在同一系统上完成
TwinCAT 运动转换软件将机器人控制技术集成到TwinCAT自动化套件中。PLC、运动控制、HMI、测量技术和机器人技术功能可以在同一个工业PC 上执行。配置和编程完全在TwinCAT中完成,因而可以显著减少工程时间和成本。到目前为止已经实施了如下运动系统:直角坐标运动、剪切运动、滚轴运动(H Bot)、SCARA、二维运动、二维平行运动和三自由度 Delta 运动。未来计划还将开发出其它运动系统。此外,TwinCAT 运动转换软件还提供追踪功能。这意味着机器人可以与一个移动对象同步,从而可以,例如拾取传送带或倾斜转盘上的工件。
eXtended Automation 为机器人技术带来新的机遇
通过TwinCAT 3 — 最新一代基于 PC 的控制软件,C/C++ 和Matlab?/Simulink? 也可提供作为除 IEC61131-3 之外的编程软件。这使得集成特殊机器人运动变得相当简单。当不得不使用专用的控制器时,他们可以作为 Matlab?/Simulink? 模型轻松集成。
可扩展的驱动技术
特别是在小型机器人应用中,需要适用于小功率电机的紧凑型驱动设备。Beckhoff EtherCAT 端子模块系统中的 EL7201 伺服端子模块在一个标准端子模块外壳中集成了一个完整的伺服驱动单元,可驱动最大功率达 200 W 的电机。简单的集成实现了紧凑型和经济型机器人技术的应用。
AX5000 系列 EtherCAT伺服驱动器可与伺服电机配套使用,实现高动态定位任务。新型AM8000 系列同步伺服电机有标准型和采用不锈钢外壳的型号可选,具有高动态性、低能耗、低成本的优点。该系列伺服电机的一个技术亮点就是采用了最新的单芯电缆传输技术,使用该项技术可以将电源和反馈系统集成到一根标准的电机电缆中,从而大幅降低材料和调试成本。AM8000 不锈钢型号的电机防护等级达到IP 67,特别适合应用于食品、医院和化工行业。
高效、安全的机器人控制系统
实时以太网现场总线 EtherCAT 具有性能卓越、刷新时间极短等特点。TwinSAFE 确保数据安全传输。Beckhoff 集成式安全系统确保了从 I/O 层到驱动的安全。这也包括 TwinCAT 系统中安全程序的编程和测试。




 投诉建议
投诉建议
提交

Beckhoff Vision:自主设计硬件产品系列与TwinCATVision相辅相成

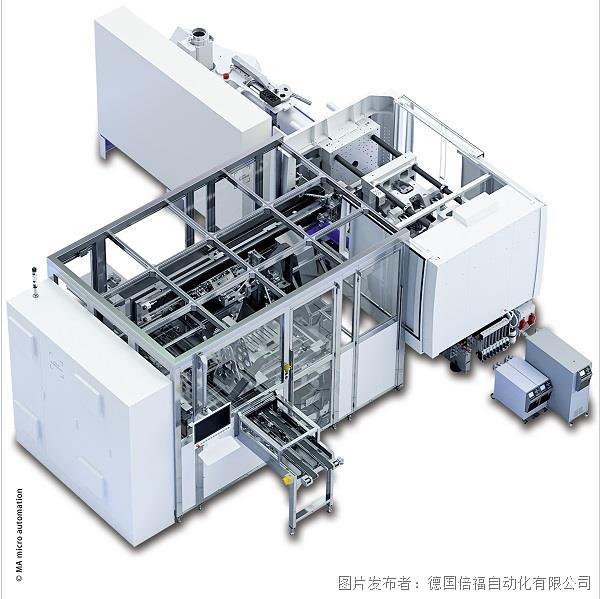
倍福 XTS 磁驱柔性输送系统助力粉针剂包装设备性能更上层楼

EtherCAT 20年:成功秘诀是技术领先、生态繁荣
单电缆解决方案助力提升模块化机械制造效率
兼容、开放的 EtherCAT 技术已经过 20 年的实践验证