


贝加莱风电软件平台简介
2014/6/13 19:12:34
众所周知,风电的整机厂商通常以一年到一年半的时间周期推出容量更大的升级机型,同一机型也会在其生命周期中遭遇如更换机械部件型号甚至供应商,针对特定风场特殊的需求或风场特殊地理位置所产生的定制机型,以及系统更新等。同时,现阶段已经开始逐渐涌现的老机型的改造项目。这些项目都需要更新主控系统。如何能够尽可能的压缩开发时间,缩短Time to Market的时间以加速推出更大容量的新机型及扩大现有机型的市场占有率已成为各大整机厂商迫切需要解决的问题之一。
面对这一系列的需求和挑战,贝加莱技术部门凭借在多个行业积累的丰富项目经验及对于风电行业的深入调研,推出了WEC风电主控软件平台。该软件平台基于以下几点理念设计的:首先,基于IEC61131-3标准,开发语言选择了工控行业通用的结构文本(Structured text) ,确保了软件平台的规范性和通用性。其次,软件平台由一系列功能定义明确,接口清晰的程序模块组成。模块化的设计便于添加、修改和移除单个部分。且由于被有机的分割成很小的模块,便于维护与测试,测试通过的部分可以在不同项目中重复使用,大大提高了代码的复用率,缩短了开发周期。同时,软件平台集成了完整的I/O诊断功能,并且可以在运行时进行维护。并且整个软件平台是高度参数化的,开发维护人员可以在线通过修改各项参数完成对风机的优化与维护。
WEC风电主控软件平台根据部件与功能结合的原则将整台风机分为如下所示的程序包:
机械刹车包 负责机械刹车的控制
电控柜包 负责电控柜相关硬件如按钮,指示灯,柜体加热器与冷却风扇等的控制
通讯包 负责与组态画面、风场监控系统等的通讯
冷却包 负责齿轮箱、发电机等冷却水和风扇的控制
数据存储包 负责生成并存储需长期保留的风机运行数据
环境监控包 负责监控风机震动、机舱和塔底温度等环境数据
齿轮箱包 负责齿轮箱相关数据的监控
电网监控包 负责箱变系统与电网数据的监控
液压系统包 负责处理液压系统
润滑系统包 负责主轴承、齿轮箱及偏航等部件的润滑控制
变桨系统包 负责变桨系统的控制
发电系统包 负责变换器及发电机的控制
风轮包 负责风轮转速的监控
系统包 负责主流程、手动控制、变桨扭矩控制器与偏航控制器的控制
UPS电源包 负责UPS电源的监控
天气监控包 负责风速风向、室外温度等天气数据的监控
偏航系统包 负责偏航系统的控制
程序包之间通过全局变量作为定义清晰的接口进行交互。作为接口的全局变量将被申明在对该全局变量进行写操作的程序包内,其余程序包理论上只对该全局变量进行读操作。这样的结构也是为了方便风电这样复杂度较高的项目在开发团队中的开发,开发团队中的每个成员可以方便的分离自己需要开发的程序包,开发测试完成后整合到软件平台中即可,而对子系统的更改,仅在相关的软件包中进行,大打降低了更新、维护与升级的复杂度与工作量。
而每个程序包内部又可以分为以下五个部分:
数据准备 负责相关程序包的输入数据的整合计算,以备后续使用
状态检测 负责检测相关程序包的操作条件是否满足并以状态输出
控制逻辑 负责如开闭环控制等逻辑控制并处理程序包相关的输出
数据监测 负责生成程序包相关的统计数据存储及组态画面或风场监控等所需的数据
参数设置 负责读取存储程序包相关的设定参数
程序包之间,每个程序包内部五个部分之间都通过全局变量作为定义清晰的接口进行交互。作为接口的全局变量将被申明在对该全局变量进行写操作的程序包内,其余程序包理论上只对该全局变量进行读操作。
在运行时,风机的所有数字量模拟量输入与总线输入被相关程序包的数据准备程序转化为物理值,提供给后续相关的状态检测程序、主流程、变桨扭矩控制器、偏航控制器与控制逻辑程序部分使用。相关的状态监控程序根据数据准备程序提供的物理值决定风机的状态提供给主流程。由主流程根据这些状态决定风机的运行状态并对变桨扭矩控制器、偏航控制器给出设定值。变桨扭矩控制器与偏航控制器根据主流程给出的设定值与数据准备程序提供的物理值,决定桨距角、扭矩设定值提供给控制逻辑程序。逻辑控制程序根据变桨扭矩控制器、偏航控制器与数据准备程序给出的物理值根据逻辑程序给出相关的输出值。
以风轮超速为例,解释在各程序包、主流程、变桨扭矩控制器、偏航控制器之间的数据流转。模拟量输入风轮编码器读数输入到风轮数据准备程序包,经过计算得到风轮转速,在风轮状态检测程序中检测到风轮转速大于参数风轮转速超限值,输出风轮超速报警,在主流程根据该报警,控制风机进入停机状态,输出最小桨距角为停机桨距角,运行状态为停机状态。变桨扭矩控制器根据更新后的最小桨距角计算桨距角设定值,输出至变桨系统包执行通讯输出至变桨系统,而相关程序包根据停机状态,控制相关部件的动作。
在整个软件平台中,可以看到又主流程、变桨扭矩控制器、偏航控制器组成的系统包是整个风机控制算法的核心。所以系统包也是整个软件平台中最特别的一个包,它包括了系统管理、系统数据准备、系统状态检测、系统控制逻辑(主流程)、变桨扭矩控制器、偏航控制器、系统数件检测和系统参数设置。其中系统管理程序主要负责状态与参数的初始化已经重置所有状态。系统数据准备主要手动控制的准备。系统状态检测主要负责监控风机运行状态是否超时,系统控制逻辑除主流程的状态机之外,还负责通过监控各子系统的输出状态监控整个风机的状态,进行紧急停机、快速停机和普通停机的触发条件监控和触发后的相关停机动作控制。同时负责在限功率状态,检测到暴风时限制风机的功率输出及当整个风机进入共振频率时的控制。主流程的部分则主要是个运行状态之间的跳转条件和当前运行状态的设定值、限制值的生成。而变桨扭矩控制器作为这个风机控制的核心算法由MATLABSimulink自动生成,用户可以根据自己掌握的Know how与特殊需求自行开发或定制,只需保持与系统的接口一致,就能快速的替换使用。
当软件平台运用于特定风机,即进行客户化定制流程时,软件架构以及主流程部分通常不需要进行任何修改,开发人员只需把开发、测试与调试的重点集中在有变化的子系统部分,更改相应的控制逻辑,增减相关参数与报警状态,根据新风机的技术参数重新生成对应的变桨扭矩控制器,就完成了控制算法部分的升级更新工作。这些工作通常可以在很短的几周时间内完成。




 投诉建议
投诉建议
提交
查看更多评论
其他资讯
ACOPOS 6D-装配生产新模式
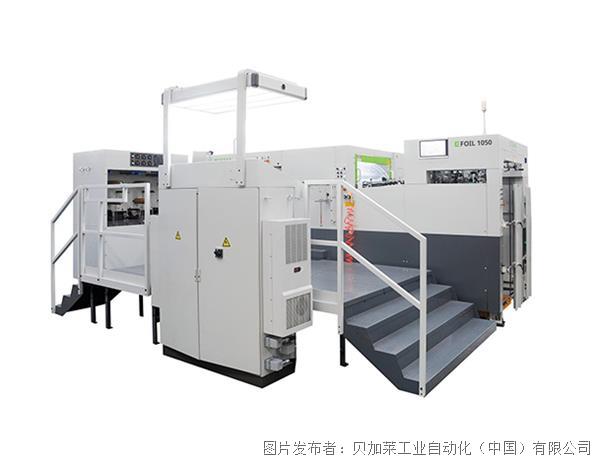
高品质烫金烫出金字招牌

机器制造商:软件视角的系统选择策略
一个软件,多种机型-称重软件整体规划提升出机效率
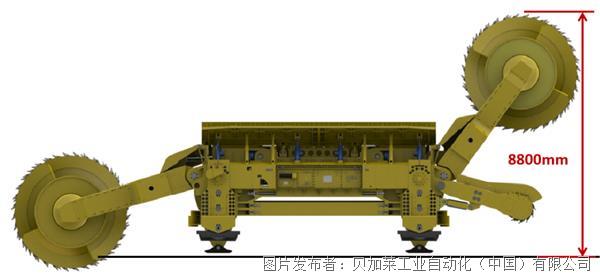
世界级的采煤装备-来自贝加莱的支持