


机器人:“工厂杀手”还是“靠谱朋友”?
机器人“杀人”了……
就在前几天,德国大众汽车公司一所工厂发生一起悲剧,一名技术员被机器人“杀死”了。这起事故发生于距法兰克福约100公里的包纳塔尔工厂,遇难技术员是大众承包商,当时他与一名同事合作安置机器人,但被机器人击中胸部,并被抓起、重重摔在一块金属板上,最终因伤重不治身亡。
脑补画面,网友着实捏把汗,小编心也颤一颤……

机器人不是“终结者”
与小编一样,许多网友因这件事不约而同想到了好莱坞系列科幻影片《终结者》:影片中,人类研制的高级计算机控制系统“天网”失控,机器人拥有自我意志后,开始与人类为敌,屠杀人类。
第一部《终结者》在1984年上映。而人类对机器人的担忧却比这更早, 早在上世纪70年代就发生过自动化组装生产线的事故,而第一起记录在案的机器人致人死亡事件,发生在1979年的福特(Ford)美国工厂。自那以来,机器人致死事件每年都会发生,或许在所有致人死亡的工业事故中所占比例不大,但也引起人们的恐慌。
但是将机器人称为“终结者”,多虑了。此次被大家称为“凶手”的机器人属于重型机器人,重型机器人通常被放置在安全笼后面,防止其与人类意外接触,在这起事件中,遇难技术员事发时正站在安全笼内。再说到重型机器人,将它定义其为一台工业机械手似乎更合适些,因为该机器设备依赖于特定编程程序指令的控制,而非智能控制。所以在此事件中,更大的可能性是技术员在安装调试过程中,意外触碰或启动了某些工作程序,致使机器人在指令的驱动下,发出一些动作,而这些动作恰巧又撞到并勾起正在范围内工作的技术人员,由此对其造成了致命的伤害。
员工可靠的好帮手
当今机器人应用飞速发展,无非是解决生产中的三个问题:人干不了(针对于特种机器人),人干不好(针对汽车等高端领域),人不想干(针对国内一般制造业),现在基本已到了“人不想干”的阶段,需要用到大量的机器人。事实上,机器人不但不是“工厂杀手”,还很可能降低了工厂中的整体死亡率,原因是假如由人力来做机器人所做的工作,本会有更多的人在一系列工业事故中丧生,机器人可将员工从单调的重复性工作中解放出来,从事更具技术性的工作,这样,工人或许还省得下现场了,离工厂的危险源也就更远一步。
“机器人杀人事件”再次敲响了人们对于机器人安全问题的警钟。人为操作因素姑且不论,就谈机器人安全,Asimov的科幻小说《机器人》中有三条重要的规则:机器人不能主动伤害人、必须遵循人的指令以及必须保护其自身不受伤害。之前,我们对于机器安全问题比较忽略,因为安全系统看上去是巨大且长久的投资,短期之内也许得不到太具体的效益,但从效率、生产线、政策法规及企业对员工的责任四大方面来说,机器人上所设置的安全系统及安全功能是不可或缺的。
在机器人的安全性上,最大的挑战莫过于构建控制系统,对人员和机器人进行完整的实时性监控,确保能够造成人员伤害的事故不会发生。而近年来,各大自动化厂商的盟主们也纷纷在操作控制及设备的安全上发力,让自己的机器人变得更加可靠。

贝加莱SLS@TCP功能块及可视化的openSAFETY应用开发
举例而言,早在2010年,贝加莱就开发了SLS@TCP功能模块来解决机器人关节的速度限制问题,并针对机器人工具中心点(TCP)的速度限制,在减速运行、示教及维护上来保障设备及人身的安全。如今,贝加莱将机器人安全控制的功能进行延伸,当用户登陆“SafeDESIGNER”,就可针对SafeRC SLS、SafeRC SLP和SafeRCSLO等模块进行安全性检测;除此之外,集成安全功能的ACOPOS伺服驱动提供安全轴定位,除了监测TCP速度和串联机器人所有关节速度(即SLS),也可用来监测SLP和工具安装法兰定位。也就是说,当你已知机器人定位,就可以计算出所有关节、工具安装法兰、TCP坐标位置和附加监测点坐标位置。

汇川机器人安全系统三大优势
国内厂商来说,汇川技术机器人产品针对机器人安全系统设立三大功能:自主碰撞检测——基于自动学习功能,在线监测与诊断重复轨迹是否发生碰撞;基于动力学模型控制,主动预估非重复轨迹是否发生碰撞;同时可实现在机器人故障、撞击情况下的力矩及速度限制,最终实现安全停机。安全区域和障碍物自动规避——用户可根据应用场合设定不同等级的安全区域,当机器人进入设定的区域后机器人控制系统将会有相应的安全防护措施。根据仿真软件实现将设备周边的障碍物设计入机器人运动区域,同时识别和提取非工作区和路径的特征。当机器人因故障、撞击等原因停机之后,可在安全速度、安全力矩等条件下重新启动机器人并安全地回归原点;可灵活配置的安全接口——配备多种接口并可根据配置的安全接口信号反馈做出相应的安全防护措施。

康耐视公司In-Sight®视觉系统
除了整个的控制系统的技术升级和优化,在设备的安全性上,企业也大有作为。比如,康耐视公司著名的In-Sight®视觉系统中配备了“TestRun”的功能,TestRun可以帮助员工确认“边界线”检查,优化产品检测标准。VisionView操作员界面用于在工厂车间执行TestRun,如果存在可能会对视觉系统的运行造成不利影响的情况,TestRun将提醒操作员,尽可能避免不良结果。如果操作员修改程序,TestRun将确保这些修改不会对其它任何程序造成影响,并在新的项目或程序部署后,为日志文件提供可以确认的和文件记录的测试信息,这些信息可以确认系统性能。再比如,Rethink公司的独有专利——串联弹性驱动器(SEA)成功应用于Baxter机器人中,SEA包括一台电机、齿轮箱以及弹簧,对于SEA而言,弹簧压缩量就相当于力传感器,SEA通过弹簧的压缩量来控制力的输出,相比于弹性驱动,Rethink认为刚性驱动更符合安全要求,就像被弹簧弹中和被硬物击中的差别一样。
与cobot安全的“亲密接触”
就拿出事儿的大众汽车所在的汽车工业来说,它是当前机器人应用最为密集的产业,除了重型机器人之外,被称为“工作场所助理机器人”的“协作机器人(collaborativerobot,又称cobot)”在汽车领域中被广泛应用。目前,有些汽车制造商已经开始把cobot投入生产线与工人一起工作, cobot没有配备安全笼,不过可以在制造时限制它们的力量和速度,这些机器人还装有传感器,能够探测人类的运动。按照有些机器人的设计,它们在发现有人过于靠近时就会停止工作。从设计上说,这种机器人是不在笼子里而是在人们身边工作的。这种机器人拥有传感器及其他安防措施,能够限制它们的力气并防止它们横冲直撞。
对于一些生产而言,由于机器人被关在铁笼子里,这使得很多复杂的并且需要人与人之间配合的工作无法进行。而人机协作机器人则客服了曾经的弊端,将无防护的机器人从牢笼中解放出来。它们能使自动化生产更加贴近于小型和中型产品,生产厂商可根据不同的产品尺寸灵活地选择自动化解决方案。但是cobot在生产线上与人“亲密接触”,那么,与之协同工作人员的安全应该如何保障?
2013年5月,美国机器人工业协会(RIA)宣布最新的机器人安全标准已经通过美国国界标准学会(ANSI)的认可,此标准为cobot提出了四项要求:具有安全等级的受控制动、手控、速度和间距监控及限制功率和力。通俗点讲,就是在速度和间距监控模式下,当人员靠近机器人,机器人的运行速度将会减慢,甚至当人员与机器人的距离过于相近时,cobot就会停止工作并选择其它的运行路径。在受制功率和受限力的模式下,如果人类的身体和cobot发生了明显的接触,那么必须确保接触力足够的小才可以。

安川电机Motoman双臂机器人
具有代表性的是安川电机的Motoman双臂机器人,它采用了具有安全等级的受控制动。在某些情况下,他们也对速度和间隔距离进行监控。与其它协同机器人不同,Motoman系统的速度和功率与传统机器人类似,他的设计基于独立性作业场合,但是在配备了安全性之后,它也可用于协同作业场合。Motoman的功能安全选配单元上采用了具有安全等级的受控制动组件,候着位于机器人的控制器上,外部安全激光传感器可以发现人员是否进入机器人作业区域,并通知机器人手臂减速或者停止。

Universal Robots UR系列机器人在生产线上工作
UniversalRobots 的UR系列机器人的重量只有18kg,利用其专利传感技术帮助其实现功率和力的限制功能,在机器的每一个位置配置冗余编码器,通过电流和位置数据,就能够推算出力,机器人知道它使用多少牛顿的力足以负载或者移动物体,当发现李菊过高时,机器人手臂就会安全关闭避免发生事故。

ABB YuMi双臂协作机器人
不得不提的是ABB YuMi双臂协作机器人。凭借人性化安全设计,YuMi能够与人类进行近距离协作。它拥有一付轻量化的刚性镁铝合金骨架以及被软性材料包裹的塑料外壳,能够很好地吸收对外部的冲击。当YuMi感知到一个突然冲击,比如与人类同事相碰撞时,它能够在几毫秒的时间内暂停运动,并且很轻松就可以再次恢复运动,如同在遥控器上按下播放键一样简单。此外,YuMi的关节处没有任何夹紧点,在关节开合过程中,不会对人体任何敏感部位造成伤害。(GK-CJT)




 投诉建议
投诉建议
提交

直播定档!见证西门子与中科摩通联手打造汽车电子智能制造新范式
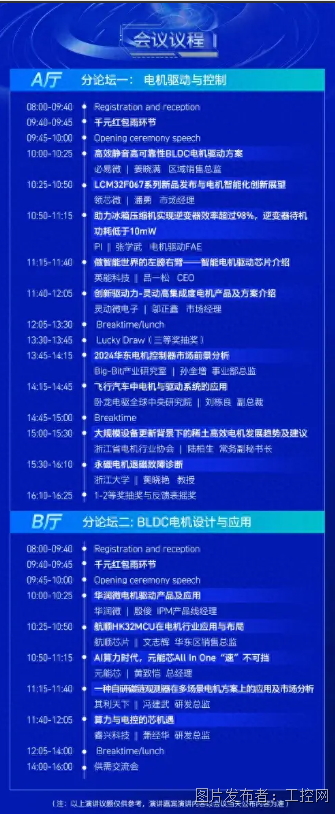
重磅议程抢先看|揭秘行业热点,引领技术潮流

光亚论坛·2024 智能产业聚合高峰论坛举办!

新讯受邀参加华为Redcap产业峰会,并荣获RedCap生态合作奖!

2024年斯凯孚创新峰会暨新产品发布会召开,以创新产品矩阵重构旋转