


视觉感知系统 详解多旋翼飞行器上的传感器技术
两年来,大疆精灵系列更新了两代,飞控技术更新了两代,智能导航技术从无到有,诸多新的软件和硬件产品陆续发布。同时我们也多了很多友商,现在多旋翼飞行器市场火爆,诸多产品琳琅满目,价格千差万别。为了理解这些飞行器的区别,首先要理解这些飞行器上使用的传感器技术。

1.飞行器的状态
客机、多旋翼飞行器等很多载人不载人的飞行器要想稳定飞行,首先最基础的问题是确定自己在空间中的位置和相关的状态。测量这些状态,就需要各种不同的传感器。
世界是三维的,飞行器的三维位置非常重要。比如民航客机飞行的时候,都是用GPS获得自己经度、纬度和高度三维位置。另外GPS还能用多普勒效应测量自己的三维速度。后来GPS民用之后,成本十几块钱的GPS接收机就可以让小型的设备,比如汽车、手机也接收到自己的三维位置和三维位置。
对多旋翼飞行器来说,只知道三维位置和三维速度还不够,因为多旋翼飞行器在空中飞行的时候,是通过调整自己的“姿态”来产生往某个方向的推力的。比如说往侧面飞实际上就是往侧面倾,根据一些物理学的原理,飞行器的一部分升力会推着飞行器往侧面移动。为了能够调整自己的姿态,就必须有办法测量自己的姿态。姿态用三个角度表示,因此也是三维的。与三维位置、三维角度相对应的物理量是三维速度、三维加速度和三维角速度,一共是十五个需要测量的状态。
这十五个状态都对多旋翼飞行器保持稳定飞行有至关重要的作用。拿“悬停”这件看起来是多旋翼飞行器最基本的能力来说,实际上飞行器的控制器在背后做了一系列“串级控制”:在知道自己三维位置的基础上,控制自己的位置始终锁定在悬停位置,这里的控制量是一个目标的悬停速度,当飞行器的位置等于悬停位置时,这个目标悬停速度为0,当飞行器的位置偏离了悬停位置时,飞行器就需要产生一个让自己趋向悬停位置的速度,也就是一个不为零的目标悬停速度;飞行器要想控制自己产生目标悬停速度,就需要根据自己当前的三维速度,产生一个目标加速度;为了实现这个目标加速度,飞机需要知道自己的三维角度,进而调整自己的姿态;为了调整自己的姿态,就需要知道自己的三维角速度,进而调整电机的转速。
读者可能会想哇为什么这么复杂。其实我们身边的许多工程产品都在简单的表现背后藏着复杂的过程。比如汽车的油门也是类似的,踩下油门之后,有传感器测量汽油的流速、控制汽油的流速;然后有传感器测量发动机的转速、控制发动机转速……从踩油门到加速的过程中也有许许多多的传感器在测量汽车的各个状态量,并对这些状态量施加控制。




 投诉建议
投诉建议
提交

直播定档!见证西门子与中科摩通联手打造汽车电子智能制造新范式
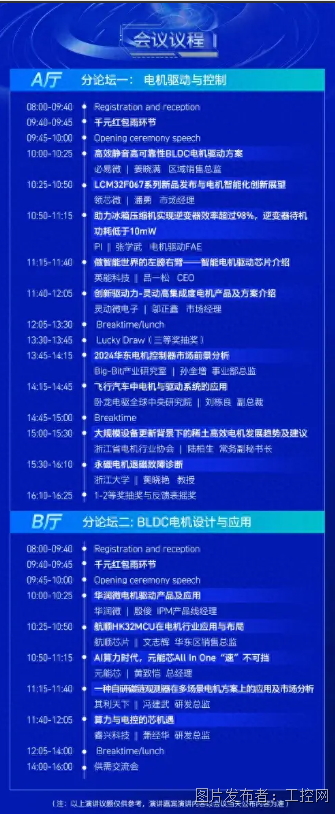
重磅议程抢先看|揭秘行业热点,引领技术潮流

光亚论坛·2024 智能产业聚合高峰论坛举办!

新讯受邀参加华为Redcap产业峰会,并荣获RedCap生态合作奖!

2024年斯凯孚创新峰会暨新产品发布会召开,以创新产品矩阵重构旋转