


固高开放式可重组工业机器人控制系统开发平台

固高科技的工业机器人控制系统开发平台由开放、可重组的硬件平台和软件平台组成。开发平台基于WINCE的操作系统,满足机器人应用对实时性、安全性及稳定性的需求。该平台针对有开发能力的机器人制造商、有行业应用需求的工业客户和高校研究型机构,采用可二次开发的系统架构,为客户定制工艺、算法提供解决方案。
机器人控制系统开发平台提供弧焊、点焊、切割、喷涂、搬运、装配、加工、码垛、跟随取放、数控雕刻等工艺,广泛应用于汽车、食品、包装、激光等行业。
功能特点
![]() 支持示教、回放、远程控制模式
支持示教、回放、远程控制模式
![]() 支持离线示教文件编辑
支持离线示教文件编辑
![]() 支持多工作空间监控(工作空间,障碍物空间,限制空间)
支持多工作空间监控(工作空间,障碍物空间,限制空间)
![]() 具有前进、后退示教检查功能,机器人数控、仿真运行功能
具有前进、后退示教检查功能,机器人数控、仿真运行功能
![]() 关节空间PTP指令,笛卡尔空间PTP指令,笛卡尔空间直线、圆弧CP指令
关节空间PTP指令,笛卡尔空间PTP指令,笛卡尔空间直线、圆弧CP指令
![]() 可支持不同构型机器人,支持超过35种4-6轴标准结构及非标结构的工业机器人本体
可支持不同构型机器人,支持超过35种4-6轴标准结构及非标结构的工业机器人本体
![]() 可调整机器人动力学参数
可调整机器人动力学参数
![]() 可配置常见主流品牌的伺服驱动系统
可配置常见主流品牌的伺服驱动系统
![]() 支持客户自定义本体构型和二次开发自定义工艺模块
支持客户自定义本体构型和二次开发自定义工艺模块
![]() 支持两个外部轴控制,实现8轴联动
支持两个外部轴控制,实现8轴联动
![]() 支持机器人数控雕刻工艺
支持机器人数控雕刻工艺
![]() 支持无传感拖动示教功能(支持机器人动力学参数标定)
支持无传感拖动示教功能(支持机器人动力学参数标定)
![]() 支持机器人标定算法模块(需专用检测设备支持)
支持机器人标定算法模块(需专用检测设备支持)
系统架构





软件平台

开发环境特点:
![]() 开放式、可重组机器人应用系统二次开发平台,提供全类型机器人运动学模型函数和轨迹插补接口
开放式、可重组机器人应用系统二次开发平台,提供全类型机器人运动学模型函数和轨迹插补接口
![]() 完全符合IEC61131-3标准,支持C/C++语言编程
完全符合IEC61131-3标准,支持C/C++语言编程
![]() 精确到1MS的实时内核
精确到1MS的实时内核
![]() 支持第三方UI界面开发工具
支持第三方UI界面开发工具
![]() 支持网络访问与维护
支持网络访问与维护
![]() 多重加密功能,保护客户知识产权
多重加密功能,保护客户知识产权
![]() 方便实现智能制造与生产管理
方便实现智能制造与生产管理


机器人离线编程软件:
![]() 模块化可集成:软件采用模块化设计,可根据客户不同需求定制
模块化可集成:软件采用模块化设计,可根据客户不同需求定制
![]() 机器人建模:采用POE对机器人进行建模,支持各种机构的建模仿真
机器人建模:采用POE对机器人进行建模,支持各种机构的建模仿真
![]() 碰撞检测与距离计算:快速实现仿真模型的最小距离计算和碰撞检测
碰撞检测与距离计算:快速实现仿真模型的最小距离计算和碰撞检测
![]() 三维环境的人机交互:提供友好的交互方式,方便用户开发使用
三维环境的人机交互:提供友好的交互方式,方便用户开发使用
![]() 正逆运动学:支持串并联机构正逆运动学通用算法
正逆运动学:支持串并联机构正逆运动学通用算法
![]() 动力学:实现串并联机构的通用动力学算法
动力学:实现串并联机构的通用动力学算法
![]() 轨迹规划算法:可以自动规划无碰撞的机器人轨迹
轨迹规划算法:可以自动规划无碰撞的机器人轨迹
![]() 轨迹优化算法:最小化时间和能量的机器人离线优化轨迹算法
轨迹优化算法:最小化时间和能量的机器人离线优化轨迹算法
![]() 虚拟控制器:实现精准的时间与轨迹控制,仿真效果与实际控制器相同
虚拟控制器:实现精准的时间与轨迹控制,仿真效果与实际控制器相同
![]() 机器人指令生成:生成支持不同控制器的指令语言
机器人指令生成:生成支持不同控制器的指令语言
![]() G代码解析:解析UG,Powermill等CAM软件生成的代码,导入仿真环境
G代码解析:解析UG,Powermill等CAM软件生成的代码,导入仿真环境
![]() 工艺包定制:可以定制焊接、标定、CNC等机器人常用工艺包,方便客户使用
工艺包定制:可以定制焊接、标定、CNC等机器人常用工艺包,方便客户使用

硬件平台

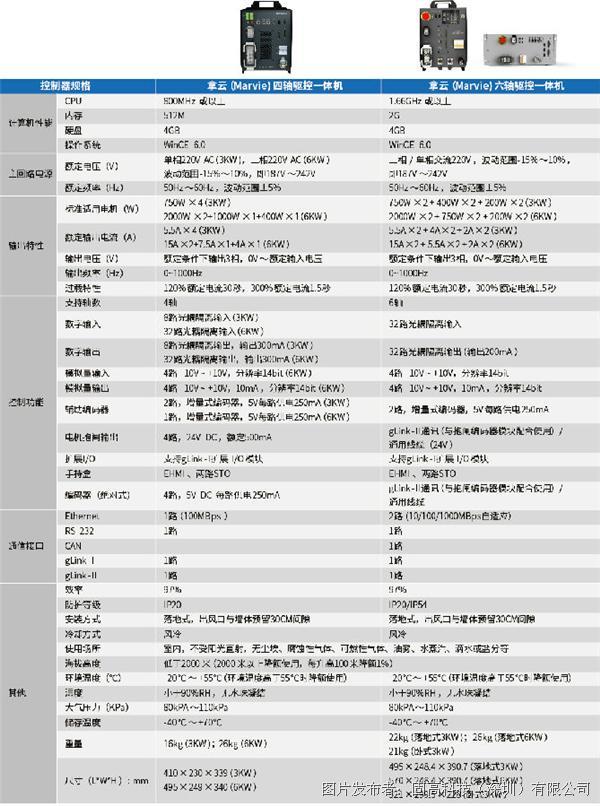
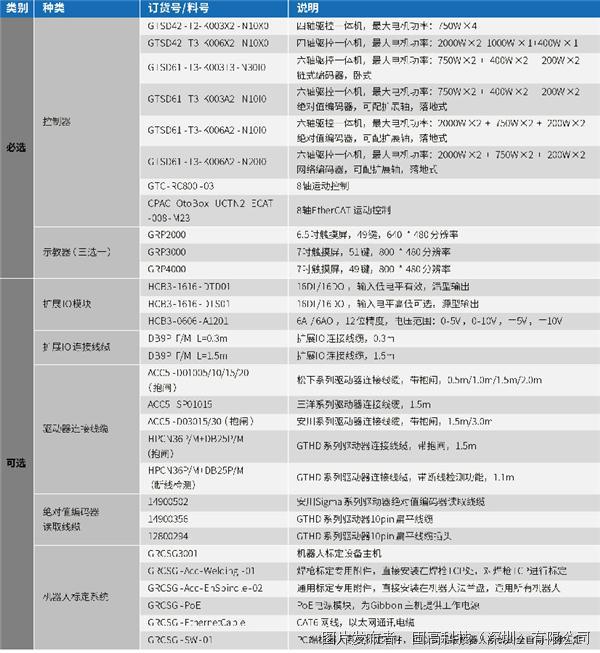
订货信息
作为中国及亚太地区领先的运动控制产品及技术供应商,固高科技在为装备制造业提供的技术创新平台之上专注于开展运动控制技术、伺服驱动技术、机器视觉技术和机械优化设计四个方向的核心技术研究,运控技术及产品广泛应用于微电子、机器人、数控机床、电子加工和检测、印刷、包装、及生产自动化等工业控制领域。





 投诉建议
投诉建议
提交

严正声明|固高科技禁止网络销售的声明

固高科技强势亮相2024武汉光博会
固高科技诚邀您共赴2024武汉光博会

闪耀SEMICON CHINA | 固高科技半导体行业解决方案

新品推介 | 固高GSLD系列经济型交流伺服驱动器