


3C电子行业精密涂胶的力控协作机器人
以蓝牙耳机装配为例,JAKA搭建了具有编程简单、路径自调节、加工速度平稳、支持周期涂胶与批量修改等特点的节卡机器人涂胶工作站,实现自动涂胶。

l 蓝牙耳机涂胶需求痛点
蓝牙耳机形状各异、结构紧凑,内部集成音频、驱动、麦克风、蓝牙、运动传感器、电池等多个模块。涂胶时,有如下痛点:
1)路径复杂,多不规则弧线。如常见的盒装耳机,底部外径约为5-7mm,内径不足4 mm。同时,耳机内部零件精密多样,导致路径复杂。
2)精密涂胶工艺,难以实施。比如在耳机底部缝隙填充时,需在一个坡面顶端背后0.25mm 宽的弧形缝隙内均匀填充胶水且不允许溢胶。
3)涂胶工艺一致性要求严格。胶量的一致性直接影响涂胶效果,上述底部缝隙填充,需要在每个均匀不一的缝隙内准确填充1.68mg 胶水,故对涂胶精度、速度、稳定性均提出了极高要求。
4)胶水种类多,需兼容多工艺。厂商会使用各类胶水,自动涂胶工作站需要兼容更多的胶水类型和工艺场景。
l “人工+专机”传统生产模式痛点
1)人工成本高,质量难以保证。工人长时间工作,易产生疲劳,人工方式容易涂胶不均匀,导致生产效率低、质量下降。
2)经验要求高,标准化程度低。涂胶作业考验工人经验,难以复制给新员工,难以实施标准化。
3)涂胶姿态变化大,需人工干预。虽然目前涂胶机可实现0.01mm涂胶精度,但是受限于机械结构,涂胶范围仅在10mm之内。同时,涂胶机以三轴居多,难以应对需要大姿态变化的耳机复杂腔体涂胶。
l 解决方案
节卡机器人涂胶工作站采用“力传感+机器人+专机”架构,实现对蓝牙耳机复杂腔体的涂胶和擦胶处理。
涂胶时,节卡小助系列协作机器人力控s版根据采集的力传感器数据,结合先进的力控算法、轨迹规划,实时调整涂胶路径,实现精密的运动控制,避免涂胶抖动和自动移位,保证专机的涂胶质量。
同理,擦胶时,协作机器人也会自感知擦胶力度,解决涂胶、 擦胶效率和质量难以同时兼顾这一难题。
以涂胶为例,工艺流程如下:
1)在开发的机器人应用工艺包中,设置相关参数,如耳机型号、胶水型号、涂胶机型号、力控轴号与力矩大小、力控模式等。
2)机器人利用夹爪夹取工作台上待加工的耳机,并移动至涂胶位置。
3)机器人根据工艺具体要求,实时控制涂胶机的开闭与出胶量。
4)机器人让耳机按照预设轨迹运动。同时,机器人实时获取力控传感器的数据,并计算出涂胶位置受力变化,使末端保持恒力。
5)根据受力变化实时调整运动速度与轨迹,保证涂胶均匀稳定。
6)完成涂胶后,机器人关闭涂胶机,并将耳机放入下一工位。
l 应用成效
目前,节卡机器人涂胶工作站已在国内知名高端蓝牙耳机生产商工厂投入使用,有效提升生产效率、良品率和产品一致性,推动3C电子行业智能自动化发展。




 投诉建议
投诉建议
提交
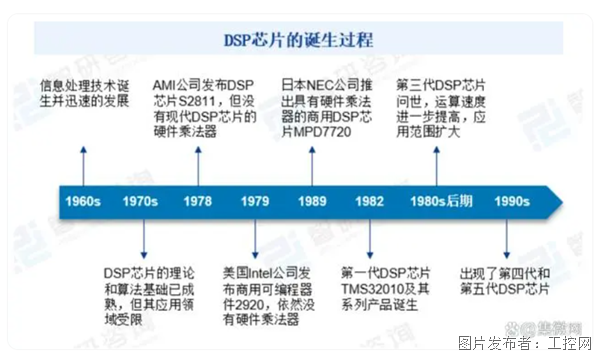
DSP应用市场的大蛋糕,国产厂商能吃下多少?

智能工控+存储-星火存储打造智慧存储,助力产业创新

智能工控+存储-金胜电子焕新品牌助力国产工控市场
应对人工智能数据中心的电力挑战

Saab UK 为深海勘探实现创新,降低潜水员及环境风险