


轨道交通智能巡检机器人
传统轨道交通巡检采用人工巡检作业,夜间车底光线差,巡检人员需用手电筒照射,检查列车底部项点是否存在缺陷,并手动记录缺陷。随着中国轨交线网加速建设,列车数量不断上升,维护运营负荷加大,巡检模式由传统人工巡检转向自动化、智能化、规模化成为必然趋势。
l 传统人工巡检模式痛点
1、人工巡检肉眼观察、手写记录,项点容易遗漏;
2、发现隐患设备不及时;
3、人工巡检记录的数据量有限,数据可靠性风险高;
4、直接影响轨交故障诊断的精确性和检测效率;
5、冬夏环境艰苦,作业人员夜班辛苦,车底作业易磕碰受伤,劳动强度大。
l 解决方案
针对轨道交通巡检工作痛点,节卡机器人与合作伙伴中数共同打造了轨道交通智能巡检机器人,集成节卡机器人、AGV、上视全景2D相机、高精度彩色3D相机等,在轨交股道间灵活穿梭,近距离、多角度、快速地拍摄轨交车底部件,助力智慧维保。

l 工序流程
用户在管理平台下发巡检任务→轨交车底巡检机器人接受任务后从充电桩出发至对应股道→车头定位→图像采集(图像实时上传,并进行算法检测)→返回充电桩充电→用户在管理平台上对故障进行复核
其中,节卡机器人负责将高精度彩色3D相机移送至更大高度;通过灵活变换不同的机械臂位姿,对上视全景2D相机(即面阵相机)所采集不到的项点进行图像采集,实现车底检测项点基本覆盖。
l 节卡机器人优势
1、本项目中车底轨道桥高度仅80cm,包含AGV和节卡机器人在内的整套设备需低于此高度。节卡机器人体积小,结构紧凑,关节全部折起后进一步节省空间,满足场景需求。
2、六轴自由度,可在车底狭小空间灵活变换位姿。
3、负载自重比高,满足3D相机载重。
4、高重复定位精度,拍摄点位准确性和一致性高。
5、图形化编程,操作简单,且机械臂动作轨迹能够被记录并复制使用。
6、操作丝滑灵活,拖拽更柔顺,方便人员手动调试。
7、作业环境中碰撞体较多,JAKA碰撞检测功能有效避免设备损伤。
l 项目成效
1、2台搭载节卡机器人的巡检机器人互相配合,节省原有工班75%人力成本;
2、巡检过程和结果数字化,数据可追溯;
3、巡检覆盖率和准确性提高,避免了人为因素造成的漏检;
4、保证巡检作业安全,降低综合运维成本。




 投诉建议
投诉建议
提交
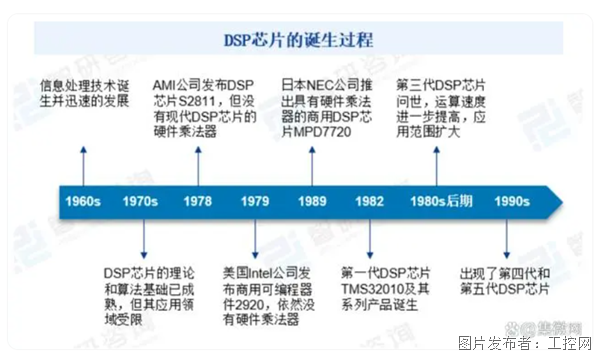
DSP应用市场的大蛋糕,国产厂商能吃下多少?

智能工控+存储-星火存储打造智慧存储,助力产业创新

智能工控+存储-金胜电子焕新品牌助力国产工控市场
应对人工智能数据中心的电力挑战

Saab UK 为深海勘探实现创新,降低潜水员及环境风险