


Themis 3D Plus无人飞行评测系统
Themis 3D+是一款室内的无人机性能检验测试平台,不仅适用于评测业界各类商用或科研无人机,更可用于飞手训练及考试,为飞手技能评估提供有力的评测数据。
产品分类:机器视觉 视觉系统
品牌:凌云
产品介绍

产品概述
详细参数
相关下载
典型应用
Themis 3D+是一款室内的无人机性能检验测试平台,不仅适用于评测业界各类商用或科研无人机,更可用于飞手训练及考试,为飞手技能评估提供有力的评测数据。
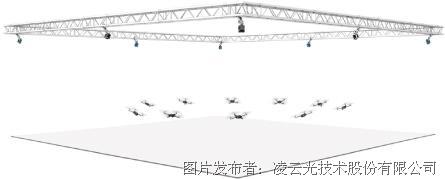
Themis 3D+是凌云自主开发面向于专业从事无人机控制、路径规划、自主避障、自主导航等研究方向的用户,提供了一套开放的、高精度实时定位的室内无人机评测系统。
Themis 3D+是一套开放的评测环境,允许从十几平米到几百平米,且多台无人机飞行的同步飞行。即使构建不同规模的飞行空间,Themis3D+的定位精度依然能保持在亚毫米级别,实时预览无人机飞行状态数据,即时评估无人机的性能和现状。
主要监测数据:

主要应用方向:


详细数据:
教学版 | 科研版 | 专业版 | |
飞行环境 | 5m x 5m | 7m x 7m | 10m x 10m |
最多跟踪无人机数量 | 6 | 10 | 20 |
分辨率 | 1280 x 1024 | 1664 x 1088 | 2048 x 2048 |
采样频率 | 240Hz | 360Hz | 180Hz |
系统延迟 | 4.2ms | 2.8ms | 5.5ms |
辅助光源 | 62 LED | 20 LED (UHP) | 170 LED |
视场角 | 56 x 46 | 70 x 49 | 51 x 51 |
位置精度 | 0.5mm | 0.3mm | 0.1mm |
硬件接口 | GigE/PoE | GigE/PoE+ | GigE/PoE+ |
数据流接口支持 | C++/Matlab | C++/Matlab | C++/Matlab |
典型应用:
1、无人机自驾性能评测
2、飞手训练/考试系统
AOPA无人机培训实操考试检验系统
1.实操考试内容:
1)起飞
多旋翼或直升机必须从停机坪垂直起飞,悬停高度为2~5米,悬停时间2秒以上。、要求:必须从半径1米的圆圈中心起飞,垂直上升,直到起落架到达指定高度位置,悬停时间2秒以上。
2)自旋一周(360度旋转一周)
驾驶员及机长等级考试要求:匀速缓慢绕机体中轴线旋转一周(旋转方向任意,向左或向右旋转均可),旋转用时应为6-20秒之间,偏移范围不超过:高度方向1米,水平方向2.5米。
教员等级考试要求:匀速缓慢绕机体中轴线向左和向右各旋转一周,旋转用时应为6-20秒之间,偏移范围不超过:高度方向0.5米,水平方向1.5米。
旋转必须以固定的速率进行。
3)水平八字


驾驶员及机长等级考试要求:正飞水平8字。保持机头一直朝前进方向完成飞行动作。
教员等级考试要求:倒飞水平8字。保持机尾一直朝前进方向完成飞行动作。
从悬停位置直接进入水平8字航线,向左或向右切入航线方向不限。
动作完成后转成对尾悬停准备降落,机头偏差角度不能超过15度。
要求:两个圆的直径相同(直径大于6米),两个圆的结合部位通过身体中线,空域在120度内,整个动作的高度不变。
4)降落
多旋翼或直升机移动至起降区上空平视高度处悬停2秒,垂直降落。着陆时必须平稳并且在停机坪的中心。
注意:在悬停动作中,所有停止必须保持最少2秒的间隔(特殊规定除外)。圆形和线形悬停部分必须以常速进行。每一次旋转必须以固定的速率进行。
2.硬件系统方案
旋翼无人机AOPA、UTC等培训机构实操考试的检验系统的关键在于如何获取无人机位置(X、Y、Z)、姿态(Pitch、Yaw、Roll),经对比研究评估,采用光学运动捕捉系统,通过已知位置的相机阵列,采集标记点(Marker)的图像信息,经过处理后计算出标记点(Marker)的位置信息,进一步计算出由多个Marker点构成的刚体的位置(X、Y、Z)、姿态(Pitch、Yaw、Roll)信息。
OptiTrack是一家专注与运动捕捉系统的公司,其所推出的高精度光学运动捕捉系统性能优良,最大可以搭建30m*30m的捕捉空间;采用850nm近红外光照明,能有效避免其他光源干扰;领先的3D重建、刚体解算精度,实时定位精度能有效控制在0.5mm,最高可达0.1mm;开源接口,支持实时数据传输。
Prime系列产品比较:
型号 | 分辨率 | 帧速 | 视场角 | 最远捕捉距离 |
Prime 41 | 2048×2048 | 180FPS | 51°*51° | 30m |
Prime 17W | 1664×1088 | 360FPS | 70°*49° | 15m |
Prime 13 | 1280×1024 | 240FPS | 56°*46° | 12m |
Prime 13W | 1280×1024 | 240FPS | 82°*50° | 6m |
**其中Prime41、Prime17W支持户外阳光下使用
1. 软件功能
各个实操考试阶段软件需要输出的检测内容:
1) 起飞
a) 上升时间;
b) 上升阶段水平平均精度(坐标位置相对原点偏差);
c) 上升阶段水平最大误差;
d) 上升阶段无人机姿态变化;
e) 悬停阶段水平方向精度;
f) 悬停阶段水平方向最大误差;
g) 悬停阶段垂直方向精度;
h) 悬停阶段垂直方向最大误差;
2) 自旋一周
a) 自旋阶段Yaw值变化曲线,图表显示;
b) 自旋时间;
c) 自旋阶段水平方向精度;
d) 自旋阶段水平方向最大误差;
e) 自旋阶段垂直方向精度;
f) 自旋阶段垂直方向最大误差;
3) 水平八字
a) 水平八字Yaw值变化曲线,最终位置Yaw值与真实情况偏差;
b) 水平八字时间;
c) 水平八字水平方向轨迹曲线,监测水平方向坐标值变化,图表显示;
d) 水平八字垂直方向精度;
e) 水平八字垂直方向最大误差;
4) 降落
a) 降落时间;
b) 降落后水平偏差;
c) 下降阶段水平平均精度(坐标位置相对原点偏差);
d) 下降阶段水平最大误差;
e) 下降阶段无人机姿态变化,图表显示。
UTC农业植保无人机培训实操考试检验系统
一、实操考试内容:
1、飞行前准备
2、功能操作考核
3、俯仰油门联动考核
4、航线考核
5、三面悬停考核
6、起降考核
7、定期保养
8、故障排除
1) 实操考试场地规范
人员:考生、教员、考官站立区域;
A:起降区,长宽1m*1m;
F:起降区,长宽1m*1m;
A1,A2,B,C,D,E1,E:考试节点;
A-A1-E1-E:三面悬停区,长宽5m*5m;
考试区域:长20m,宽5m;
人员站立区距A、F为5m。
2) 功能操作考核
流程:教员给定飞行速度(1m/s、3m/s、5m/s),飞行高度(2m、2.5m、3m),作业方向向右,学员进入智能作业,初始点设在A点,终点设在B点,在E点之前,飞行器向左作业到A点,并切换到手动作业模式,将飞行器飞到D点,并使用智能记忆功能回到A点。
考核:飞行高度、飞行速度、左右方向切换、飞行坐标记忆。
3) 俯仰油门联动考核
飞行器GPS模式从A点飞行到达A2点,飞行高度上升到5m,然后拉回到B点,飞行高度下降到2m,航线呈斜线,飞行速度维持在2-3m/s。
考核标准:航线呈斜线
4) 航线考核
飞行器以GPS模式飞行,高度2m,沿A、B、C、D、E、A完成两圈飞行作业,然后沿A、E、D、C、B、A完成两圈飞行作业,时间控制在120s以内
考核标准:速度稳定、航线笔直、高度稳定、航线与坐标重合度高
5) 三面悬停考核
姿态模式下,机头朝前、左、右,每个姿态保持5s,每个动作切换时间低于8s,飞行高度2-3m,所有动作在A、A1、E1、E形成的5m*5m的悬停区域内完成。
6) 起降考核
由A点起飞,降落到F点,再由F点起飞,降落到A点,来回降落4次,降落区域长宽1m*1m,飞行器降落时机尾对准飞手。
考核标准:脚架跨线,加5s
脚架一侧完全出界,加10s
两侧脚架完全出界,成绩无效
跌落、单边降落(脚架一侧落地,另一侧悬空,单边高度超过10cm)、滑降(接触到地面后滑动)、侧边降落,加5s
70s内完成,71s-90s(80%),91s-120s(60%),121s以上(33%)。
二、硬件系统方案
旋翼无人机AOPA、UTC等培训机构实操考试的检验系统的关键在于如何获取无人机位置(X、Y、Z)、姿态(Pitch、Yaw、Roll),经对比研究评估,采用光学运动捕捉系统,通过已知位置的相机阵列,采集标记点(Marker)的图像信息,经过处理后计算出标记点(Marker)的位置信息,进一步计算出由多个Marker点构成的刚体的位置(X、Y、Z)、姿态(Pitch、Yaw、Roll)信息。
OptiTrack是一家专注与运动捕捉系统的公司,其所推出的高精度光学运动捕捉系统性能优良,最大可以搭建30m*30m的捕捉空间;采用850nm近红外光照明,能有效避免其他光源干扰;领先的3D重建、刚体解算精度,实时定位精度能有效控制在0.5mm,最高可达0.1mm;开源接口,支持实时数据传输。
Prime系列产品比较:
型号 | 分辨率 | 帧速 | 视场角 | 最远捕捉距离 |
Prime 41 | 2048×2048 | 180FPS | 51°*51° | 30m |
Prime 17W | 1664×1088 | 360FPS | 70°*49° | 15m |
Prime 13 | 1280×1024 | 240FPS | 56°*46° | 12m |
Prime 13W | 1280×1024 | 240FPS | 82°*50° | 6m |
**其中Prime41、Prime17W支持户外阳光下使用
3. 软件功能
各个实操考试阶段软件需要输出的检测内容:
1) 功能操作考核
a) 飞行速度;
b) 平均飞行高度,高度平均误差,高度最大误差;
c) 飞行轨迹(俯视图),图表显示;
2) 俯仰油门联动考核
a) 飞行速度;
b) 飞行高度曲线(横坐标为横向位置);
3) 航线考核
a) 飞行速度;
b) 平均飞行高度,高度平均误差,高度最大误差;
c) 飞行轨迹(俯视图),图表显示;
d) 飞行时间;
4) 三面悬停考核
a) 姿态;
b) 平均飞行高度,高度平均误差,高度最大误差;
c) 飞行轨迹(俯视图),图表显示;
d) 飞行时间;
5) 起降考核
a) 起降阶段坐标变化,俯视图,图表显示,标识降落区域;
b) 飞行时间;
c) 降落阶段无人机姿态变化,最大姿态误差。




 投诉建议
投诉建议
提交

第7讲 | 《质量兴业—标签印刷质量检测与管理技能培训》

开课了|《神奇的白激光—宽带可调高亮光源在光谱成像中的应用》
富士康工业富联战略投资凌云光技术 共同深耕工业互联网新基建

“万能”光信号处理利器-Finisar WaveShaper可编程光学处理器家族介绍

“万能”光信号处理利器-Finisar WaveShaper可编程光学处理器家族介绍