


直角坐标机器人的优化设计
一 直角坐标机器人的定义及主要特点 机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。直角坐标机器人是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴,Y轴和Z轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。 直角坐标机器人主要由一些直线运动单元及其组合,驱动电机,控制系统和末端操作器组成。针对不同的应用,可以方便快速组合成不同结构形式,不同维数,不同行程和不同带载能力的直角坐标机器人。从化妆品生产到汽车和手机的装配等各行业的自动化生产线中,都有各式各样的多台直角坐标机器人和其它设备严格同步协调工作,我们成功完成了数百种结构形式的应用案例。可以说直角坐标机器人几乎能胜任所有的工业自动化任务。下面是其主要特点: 1任意组合成多种结构样式,不同带载能力和行程的机器人。 2采用多根直线运动单元级连和齿轮齿条传动,可以形成几十米的超大行程机器人。 3采用多根直线运动单元并连及带多滑块结构其负载能力可增加到数吨。 4 理论上最大运行速度可达到每秒8米,加速度可达到每秒20米。 5 重复定位精度可达到0.05mm~0.01mm。 6 采用带有RTCP功能的五轴或五轴以上数控系统能完成非常复杂轨迹的工作。 沈阳百格机器人有限公司从1995年以来代理销售德国百格拉公司的直角坐标机器人,配合不同行业的用户成功地解决了他们的自动化任务。加上这10多年中公司派人到德国百格拉公司培训和德国专家到中国为用户处进行培训和编程等服务,使我们从了解分析任务,选择设计机器人,到用户处安装调试直到达到设计要求,我们不断积累经验,提高服务能力,下面就介绍如何选择合适的直角坐标机器人。 二、直角坐标机器人的选型 1 使用要求分析 对于选型的人员首先要有物理运动学基础,材料力学基础,伺服驱动器使用和数控系统的应用经验,但最主要是把用户的问题和要求等了解清楚。对于简单任务和有经验的工程师通过电话和邮件就可以沟通好,而对复杂的任务要到现场双方共同分析和制定任务描述,给出具体合理的要求。下面是所需要的主要信息: 机器人的工作过程, 手抓和负载的总重量, 一个完整的工作周期是多少,可能分解成的子运动及对应的时间, 运动和取抓过程中与其它设备的同步/握手要求, 各个运动轴的有效运动长度及允许的最大运行速度及加减速度, 机器人工作周围空间上的限制, 使用环境有粉末,高温,水和湿度等特殊防护要求, 2 机器人结构形式选择 根据前面“使用要求分析”中获得的信息资料来选择机器人的结构形式。原则上尽可能选择龙门式直角坐标机器人,但有时受工作空间限制必须选择悬臂式等。在食品搬运和玻璃切割等项目中会产生大量粉末,伤害运动轴里面的导轨,此时最好采用吊挂式机器人。有时根据负载及运动距离和空间限制必须选用挂臂式。根据机器人的工作任务来确定负载的运动位置精度要求,要考虑减速时晃动产生的位置误差。根据机器人的工作任务及其工作空间上的限制来确定运动轴数量及各自运动行程。 3 规划运动轨迹及运动速度 根据机器人的工作任务和空间限制来规划运动轨迹。尽可能减少运动距离,对工作周期要求严的应用要尽可能运用多轴同时运动来减少运动时间和降低运动速度。抓取负载后运动速度要低,空载返回原始点时要快。负载大时加速度和减速度要小,尽可能避免产生巨大的冲击力。根据上面的原则给出各段运动的速度,加速度和减速度。各个运动段间尽可能平稳变速以保证工作周期,减少冲击力和运行噪音。在运动速度分配时要充分考虑各个运动过程与其它设备间的同步协调时间,而且规划的运动时间要比用户要求的时间短些。 4 受力分析 根据速度分析得出各个轴的最大加速度和减速度。然后再计算出多轴同时运动时产生的合成最大减速度。选择独立运动的减速度和同时运动时合成减速度二者中大的减速度,根据这个最大的减速度计算出XYZ三个方向的最大冲击力Fx, Fy和Fz及产生的最大扭曲力矩Mx, My和Mz。在计算不同轴扭曲力矩Mx, My和Mz时要考虑等效负载的重心位置,总重力和减速时产生的冲击力。 根据Fx, Fy和Fz及产生的最大扭曲力矩Mx, My和Mz来选择出各个运动轴的结构形式和型号。还要考虑各个运动轴间的连接方式,保证其强度,有足够的抗冲击力能力,使其能长期稳定高速高效工作。 5 变形分析 绕度形变仅在大跨度悬空方式下,而且受力很大的情况下才发生。其绕度形变量的计算方法见下面的公式。 但Z轴和X轴的安装方式保证了本公司机器人没有绕度形变发生或绕度形变极其微小可以忽略不计。 f = (F�L3)/(E�I�192) f:挠度形变 (mm) f≤ 1 mm F:负载压力 (N) L:导轨长度 (mm) E:弹性模量(70,000N/mm2) I:面积平方(mm4) 直角坐标机器人的优化设计 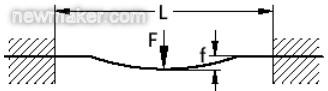
11 技术协议 每台机器人都有运行速度,重服定位精度和各种特定功能等技术要求,在签合同时务必要签订技术协议,验收内容和验收方式等。要学会机器人的保养。 三、结论 在直角坐标机器人的设计过程中要不断把设计的图纸及技术分析计算结果发给用户,双方反复沟通,不断完善。所设计的直角坐标机器人当然与技术人员本人的经验和公司技术人员的经验和工作认真负责程度有关系,合适的就是最好的。用户要有一定经验的操作员来正确操作和及时保养直角坐标机器人也是重要的。沈阳百格机器人公司聘请了3位机床厂退休的高级工程师来设计机器人和连接板。我们公司10多年来还销售德国产步进电机,伺服电机,行星减速机,机器视觉系统,机器人手爪系统和数控系统,积累了丰富的实际经验,保证了我们销售的直角坐标机器人能高效长期稳定工作。这也是我公司有了一些长期用户的基础。上面的内容是本人12年来从事直角坐标机器人方面工作所积累的一些经验,我们还有数百个成功应用案例,欢迎感兴趣的朋友与沈阳百格机器人公司一起分析探讨,共同推动直角坐标机器人在国内各行业的应用。




 投诉建议
投诉建议
提交

超越传统直觉,MATLAB/Simulink助力重型机械的智能化转型

新大陆自动识别精彩亮相2024华南国际工业博览会

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会