


PLC编程常用逻辑梯形图
PLC编程常用逻辑梯形图
一、引言
PLC编程可分为顺序控制和过程控制。顺序控制即对开关量进行逻辑运算的控制过程,是用一些常开点,常闭点,上升触发点,下降沿触发点,线圈,置位复位线圈,还有定时器组合的逻辑,其对象顺序结构无非是通路,支路,旁路,编程用状态转移法编为上策,特别要注意联锁,过程控制则变化较多,但归根到底是顺序控制的基础上加一些数据处理与数学运算。
本文以AutoThink编程软件为例,讲述所有编程软件共有的梯形图元件和功能块的常用逻辑。
二、正文
1、点动
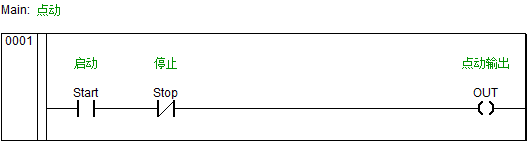
这里Start是正信号,促使结果通,一般是持续信号,Stop 是负信号,是互锁信号或促使结果断的信号,OUT是输出动作信号,也可以是功能块。可扩展Start、Stop都为一系列的信号,Start中可以加功能块限制输出,Stop、OUT之间可以加延时功能块。
2、起保停
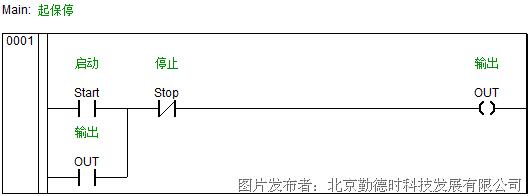
起保停逻辑的特点是将脉冲动作信号转为持续状态信号或持续动作信号。Start是启动的脉冲动作信号,Stop是负信号或互锁信号,OUT是输出的持续信号。该逻辑可引申扩展:Stop也可以为多个信号;触点OUT前也可加上其它信号或功能块,即限制结果的通断条件,Stop和线圈OUT之间可以加延时功能块。
也可以用如下逻辑(其中Start、Stop是一系列的信号):
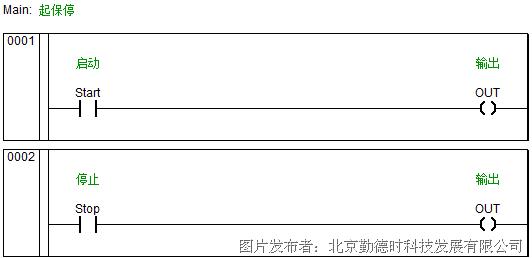
个人认为用起保停终不如用置位复位,原因是起保停的“保”在哪里难得掌握。
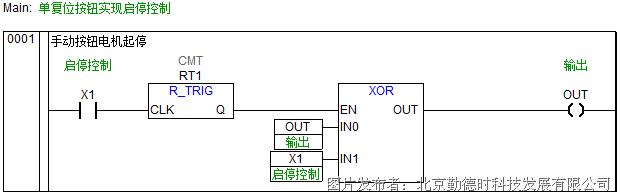
3、单复位按钮实现启停控制
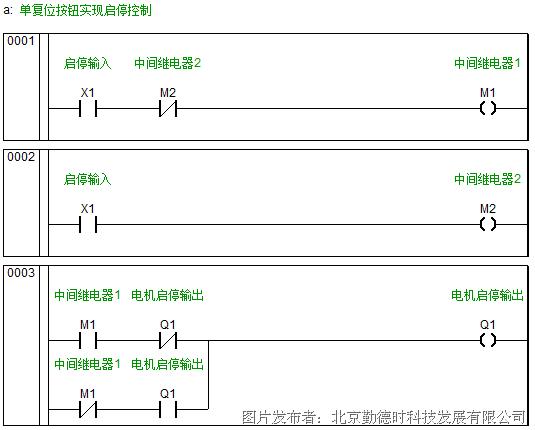
有时用户需要使用一个自复位的按钮来控制机器的启停,效果是按一下启动了,再按一下停止,再按启动,再按停止,以此往复。这个控制较上面的两种控制要复杂一些,事实上这是典型的异或门自锁输出,即判断目前的输出状态为1则置0,为0则置1。对于有异或功能块的PLC而言只需要使用XOR功能块稍加处理即可实现,如下图:
4、方波、脉冲制造
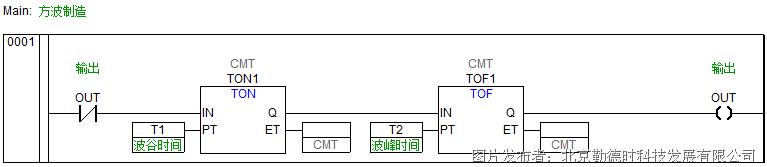
OUT为输出的方波信号,T1是波谷时间,T2是波峰时间。如果撤掉TOF延时断功能块,就成为周期为T1的脉冲制造逻辑。可以在前面加触点和功能块限制作为方波或脉冲的产生条件。
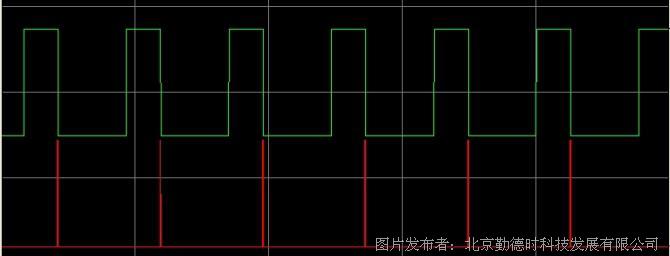
图像如下(红色表示TON的完成位,绿色是TOF的完成位即OUT):

5、循环数列制造
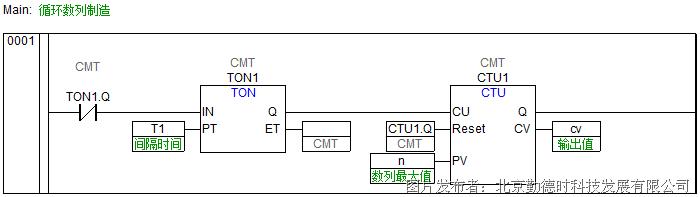
CTU计数器功能块的CV引脚就出现周而复始的连续自然数列1、2、3、4……,n,t1是数字之间变化的时间间隔,n是连续自然数列中的最大数。
6、互锁控制
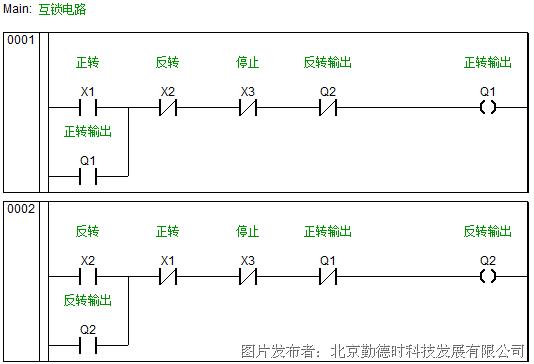
在遇到两个输出触点不能同时开启时,需要用到互锁电路,比如三相电机的正反转控制,如果正转控制和反转控制同时接通时,会造成短路。
通过将输出触点引处互锁控制,可以防止两个输出触点同时打开。
上图中第1节的X2和第二节的X1可以实现误按时停机功能,如果不需要,可以去掉。
7、顺序启动控制
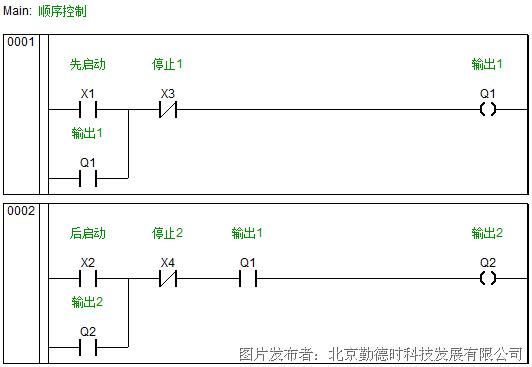
如图所示。Q1的常开触点串在Q2的控制回路中,Q2的接通是以Q1的接通为条件。这样,只有Q1接通才允许Q2接通。Q1关断后Q2也被关断停止,而且Q1接通条件下,Q2可以自行接通和停止。X1、X2为起动按钮,X3、X4为停止按钮。




 投诉建议
投诉建议
提交

打好3.0工业基础迈向4.0工业强国
物联网和智能机器将引爆下一场技术变革?
《穹顶之下》背后折射的不合理能源结构
外资制造业接连撤离中国 人口红利渐失
被疯抢的智能马桶盖与中国制造业升级