


伟创AC80变频器动力放线架调试指导
1 、 引言
线缆行业目前正在向产品多样化、生产自动化等更高的技术层次发展。在线缆行业中,应用最广泛的就是放线架,而动力放线架又是其中 技术含量较高的一种设备。动力放线架一般要求变频器含有PID调节的功能,并且PID是可以双向控制的。目前在行业应用中伟创AC80矢 量变频器可以不加任何辅助配件就可实现这样的要求。
2 、工艺介绍
动力放线架作为多种设备的最前端,在线缆行业中有着广泛的应用。一般来说,对动力放线架的要求有以下几点:
a、在引取速度加快时,放线速度也跟着引取速度快速加速;
b、在引取速度减速时,放线速度也跟着引取速度减慢;
c、当稳定运行在某个速度时,放线架的摆杆要稳定;
d、当出现松线时,收线速度也跟着松线速度快速加速;
e、当出现断线时, 要求放线盘立即停止运转;
以上的几点要求全部由变频器的PID功能完成,而且要求变频器对速度的反映要相当灵敏。

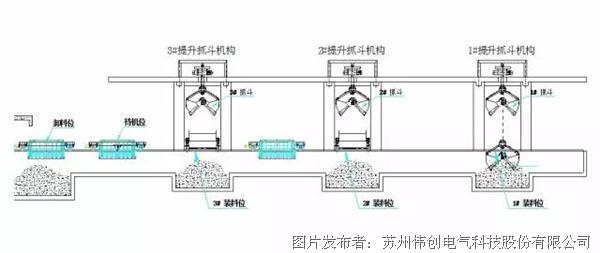
动力放线架结构示意图
3 、PID介绍
针对动力放线架对变频器的要求,伟创AC80变频器在过程PID控制模式上,给定的参考值是以工程量考虑的,其中工程单位很多,且其 PID功能能够实现双向输出,这样通过PID的双向输出就能轻松实现电机正反转控制。
变频器频率控制模式采用闭环过程控制方式,主给定频率来自变频器本身PID当前预置频率,反馈信号来自摆杆所连接的电位器或位移传 感器信号0-10VDC,这样可以实现PID的双向作用。加减速时间为1s左右。

动力放线架接线图(1)
4、调试
伟创AC80变频器在接线和调试方面都是很方便的。调试中应该注意的问题:
a、选择过程PID控制之前运行时,一定要先进行自整定操作,以使变频器自动识别电动机的等效参数,这样变频器的控制才能 更准确、更迅速;
b、PID的反馈特性选择为正特性;
c、当动力放线架有抱闸装置时,停机方式请选择自由停车;
d、伟创AC80变频器在过程PID控制时给定是以工程量为单位的,本事例是以“%”为单位的,这样就很方便的将摆杆最大位置 设定为100%(对应于摆杆电位计10VDC), 调试的关键在于找到摆杆稳定工作的点,然后将这点所在的位置定义为PID的给定;
AC80矢量型变频器在动力放线架上使用时,参数设置如下(仅供参考):
AC80变频器参数设置 | |||||
功能码 | 功能码名称 | 设定值 | 功能码 | 功能码名称 | 设定值 |
F0.00 | 控制方式 | 1 | F0.01 | 速度转矩控制方式 | 0 |
F0.02 | 运行命令通道 | 1 | F0.03 | 频率给定主通道 | 8 |
F0.09 | 最大输出频率 | 70.00 | F0.11 | 上限频率数字设定值 | 70.00 |
F0.14 | 加速时间1 | 1 | F0.15 | 减速时间1 | 1 |
F3.00 | VS1下限值 | 实测 | F3.02 | VS1上限值 | 实测 |
Fb.00 | PID控制器给定信号源 | 0 | Fb.01 | 键盘数字PID给定 | 50% |
Fb.02 | PID控制器反馈信号源 | 2 | Fb.05 | PID输出特性选择 | 1110 |
Fb.08 | 比例增益P1 | 1.06 | Fb.09 | 积分时间I1 | 5 |
Fb.11 | 采样周期 | 0.0 | Fb.12 | PID控制偏差极限 | 0% |
Fb.23 | 比例增益P2 | 1 | Fb.24 | 积分时间I2 | 8 |
Fb.26 | 第二PID参数有效范围 | 15% |
|
|
|
5 、PID参数调试指导
在实际应用中,伟创AC80变频器对速度的响应非常灵敏,在快速速度跟踪和松线反向收线两方面表现非常出色,完全满足 客户的需求。
PID调整方法:

摆杆在中心点附近来回摆动,不能停止。调FB.08,FB.09。

摆杆在中心点稍稍来回摆动,不能停止。调FB.09。

摆杆在中心点停止摆动或摆动很小

当FB.26=15%时,如上图所示摆杆到达虚线部分时启用第二段PID调节范围,调整参数FB.23,FB.24时有效。
1、PID调试一般原则 :
a、在输出不振荡时,增大比例增益P;
b、在输出不振荡时,减小积分时间常数i;
c、在输出不振荡时,增大微分时间常数d。
2、一般步骤:
a、确定比例增益P
确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令i=0、d=0(具体见PID的参数设定说明),使PID为 纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来, 从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的 60%~70%。比例增益P调试完成。
b、确定积分时间常数i
比例增益P确定后,设定一个较大的积分时间常数i的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐 加大i,直至系统振荡消失。记录此时的i,设定PID的积分时间常数i为当前值的150%~180%。积分时间常数i调试完成。
c、确定微分时间常数d
微分时间常数d一般不用设定,为0即可。若要设定,与确定 P和T的方法相同,取不振荡时的30%。
3、PID常用口诀:
参数整定找最佳,从小到大顺序查;先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;动差大来波动慢,微分时间应加长;
理想曲线两个波,前高后低4比1;一看二调多分析,调节质量不会低。




 投诉建议
投诉建议
提交

伟创电气参加第八届全国建筑施工机械租赁大会

伟创电气亮相印度国际自动化展
伟创电气废渣卸料系统在电厂的应用

伟创电气技术交流会在福建宁德顺利召开

伟创电气参加首届建筑起重机械安全管理交流大会