


一体化电机TCP/IP通信应用案例
1 一体化闭环步进电机TCP/IP通信实例介绍
NiMotion一体化闭环步进电机融合了步进电机和伺服电机各自的技术优点,相比标准步进电机运行更安静,振动更少,同时内部集成14位高分辨率编码器实现位置反馈的闭环控制,不失步在完成定位后保持稳定的位置,没有振荡,根据负载自动调整电流输出大小降低温升。在满足节能平稳及高负载承受性的要求时,能够去取代传统步进电机。同时一体化闭环步进电机集成I/O功能,方便用户的功能扩展,简化系统复杂程度。
步进电机传统的应用方案如下图所示:
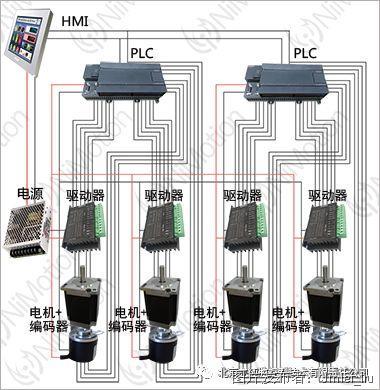
传统步进电机应用方案的缺点:
集成化低,占用空间大,接线麻烦,安装麻烦,成本较高;
开环控制精度通常较低、无自动纠偏能力;
故障率较高,维修成本高;
内部不集成I/O,需要用户增加硬件拓展,增加用户成本;
每次开机需要寻找零点,不支持掉电保持;
不能进行自诊断。
针对以上步进电机应用存在的问题, NiMotion推出了带有CAN总线功能的一体化步电机产品,产品覆盖42系列57系列和86系列,可使用带有CAN总线模块的PLC来控制NiMotion的一体化电机。考虑到CANopen总线特殊模块比较昂贵,NiMotion推出可以替代CANopen模块的以太网转CAN通信协议转换器,只需用户PLC自带以太网口即可实现对一体化步进电机的CAN总线控制。完美的替换了CANopen总线特殊模块,降低用户的使用成本的同时大大简化了工程设计和工程实施的难度。
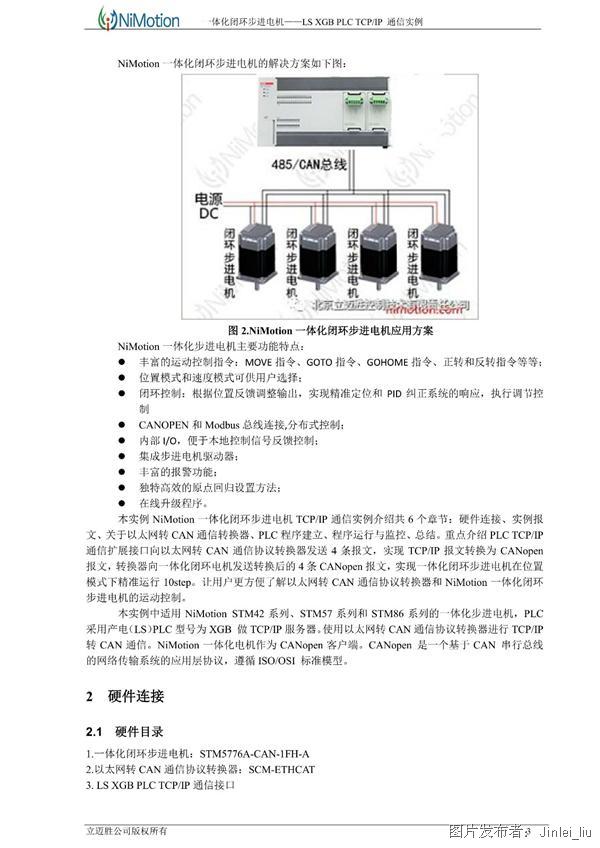
NiMotion一体化闭环步进电机的解决方案如下图:

图2.NiMotion一体化闭环步进电机应用方案
NiMotion一体化步进电机主要功能特点:
丰富的运动控制指令:MOVE指令、GOTO指令、GOHOME指令、正转和反转指令等等;
位置模式和速度模式可供用户选择;
闭环控制:根据位置反馈调整输出,实现精准定位和PID纠正系统的响应,执行调节控制
CANOPEN和Modbus总线连接,分布式控制;
内部I/O,便于本地控制信号反馈控制;
集成步进电机驱动器;
丰富的报警功能;
独特高效的原点回归设置方法;
在线升级程序。
本实例NiMotion一体化闭环步进电机TCP/IP通信实例介绍共6个章节:硬件连接、实例报文、关于以太网转CAN通信转换器、PLC程序建立、程序运行与监控、总结。重点介绍PLC TCP/IP通信扩展接口向以太网转CAN通信协议转换器发送4条报文,实现TCP/IP报文转换为CANopen报文,转换器向一体化闭环电机发送转换后的4条CANopen报文,实现一体化闭环步进电机在位置模式下精准运行10step。让用户更方便了解以太网转CAN通信协议转换器和NiMotion一体化闭环步进电机的运动控制。
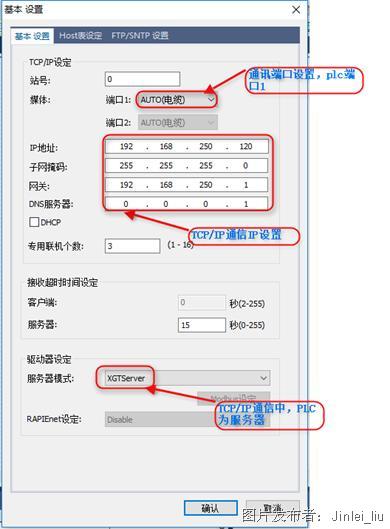
本实例中适用NiMotion STM42系列、STM57系列和STM86系列的一体化步进电机,PLC采用产电(LS)PLC型号为XGB 做TCP/IP服务器。使用以太网转CAN通信协议转换器进行TCP/IP转CAN通信。NiMotion一体化电机作为CANopen客户端。CANopen 是一个基于CAN 串行总线的网络传输系统的应用层协议,遵循ISO/OSI 标准模型。
2 硬件连接
2.1 硬件目录
1.一体化闭环步进电机:STM5776A-CAN-1FH-A
2.以太网转CAN通信协议转换器:SCM-ETHCAT
3. LS XGB PLC TCP/IP通信接口
4.电源线若干
5.一体化闭环步进电机CAN通信线一根
6.连接端子1 个
7.网线一根
2.2 一体化闭环步进电机与LS PLC硬件连接

一体化闭环步进电机与LS PLC 硬件连接
3 一体化闭环步进电机CAN总线通信参数设置

一体化闭环步进电机CAN通信参数设定电机地址:01、波特率:1Mbps;
电机地址设定范围:1-127;
注:如需更改一体化闭环步进电机地址、波特率等参数请参阅《一体化闭环步进电机CAN总线用户手册》
4 实例报文
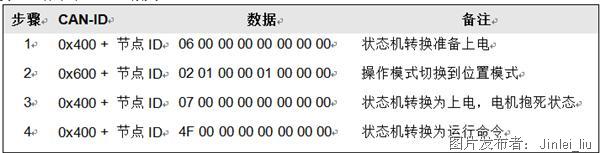
本实例中在位置模式下通过发送4条报文实现一体化闭环步进电机从当前位置相对运行10step。
发送运动命令报文如下:

5 以太网转CAN通信协议转换器
5.1 SCM-ETHCAT介绍
SCM-ETHCAT是北京立迈胜控制技术有限责任公司开发的一款工业级以太网CAN总线数据转换设备,它内部集成了两路CAN总线接口和一路EtherNet接口以及TCP/IP协议栈,用户利用它可以轻松完成CAN总线网路和EtherNet网络的互联互通,进一步拓展CAN总线网络范围。
SCM-ETHCAT为工业级产品,可以工作在—25℃~75℃的温度范围内。它具有10M/100M自适应以太网接口,CAN口通信最高波特率1Mbps,具有TCP Sever,TCP Client,UDP等多种工作模式,每个CAN接口支持2个TCP连接或多达3x254个UDP连接,通过配置软件用户可以灵活的设定配置参数。典型应用如下图:
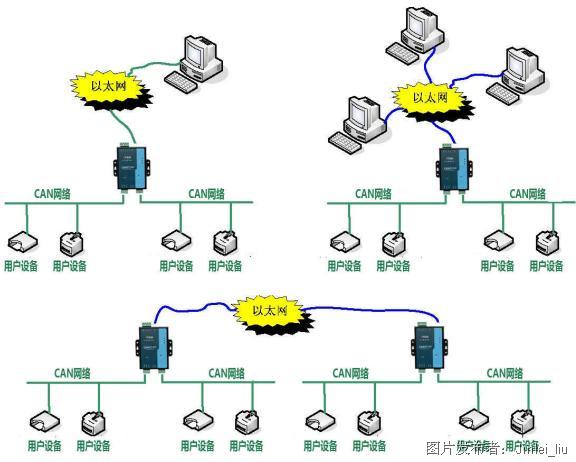
SCM-ETHCAT典型应用图
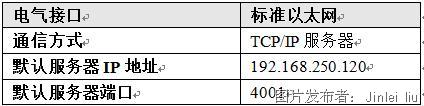
5.2 SCM-ETHCAT通信接口
5.3 SCM-ETHCAT数据转换协议
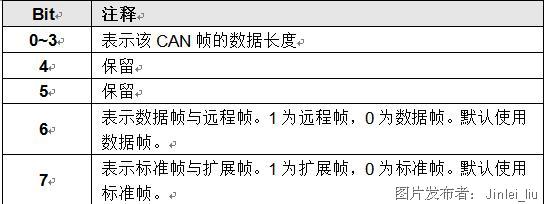
一个以太网包包含1~50个CAN帧,一个CAN帧有13个字节,下面展示一个CAN帧的数据描述。
![]()
帧信息(第0字节)
帧ID(第1字节~第4字节)
长度为4字节,高字节在前。标准帧11位有效,扩展帧29位有效。
帧数据(第5字节~第12字节)
长度为8字节,有效长度由帧信息(帧信息的Bit0~3)决定。
当有效长度小于8时,则忽略其后面的所有字节。
5.4 帧数据举例
一体化闭环步进电机MOVE指令帧数据举例:
Move命令是从当前的位置移动到相对的目标位置。在控制字Bit6设置为1,bit4产生0->1的触发,才会执行。
比如节点ID为1 ,则完整的帧报文(TCP报文)为:
08 00 00 04 01 06 00 00 00 00 00 00 00 状态机转换准备上电
08 00 00 06 01 02 01 00 00 01 00 00 00 操作模式切换到位置模式
08 00 00 04 01 07 00 00 00 00 00 00 00 状态机转换为上电,电机抱死状态
08 00 00 04 01 4F 00 00 00 00 00 00 00 状态机转换为运行命令
发送运动命令(CAN报文):
报文转换示意图
6 LSXG 5000编程软件建立PLC工程
6.1 建立新工程
双击XG5000编程软件图标 ,然后在工程新建目录选择新工程,XG5000软件编程窗口自动弹出新工程文件设置窗口。
,然后在工程新建目录选择新工程,XG5000软件编程窗口自动弹出新工程文件设置窗口。
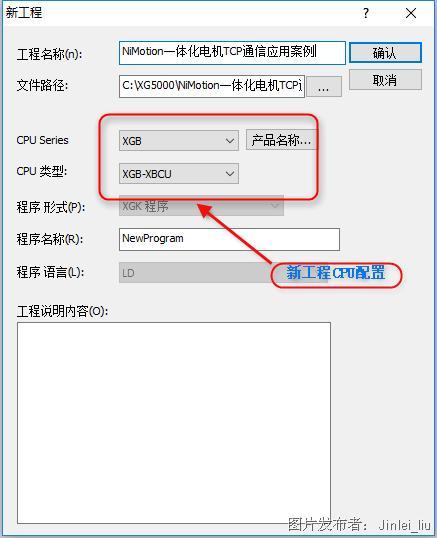
新工程文件设置窗口
设置完成后单击确定按钮,进入主程序编辑窗口。
6.2 主程序编写
在主程序编辑窗口树形结构处双击“NewProgram”进入主程序编辑窗口。然后进行主程序编写。
双击“NewProgram
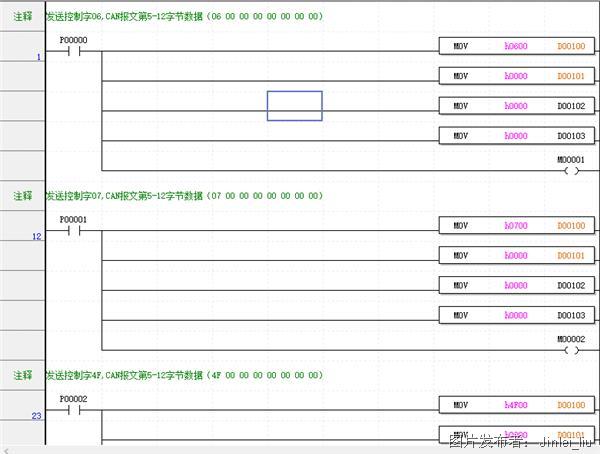
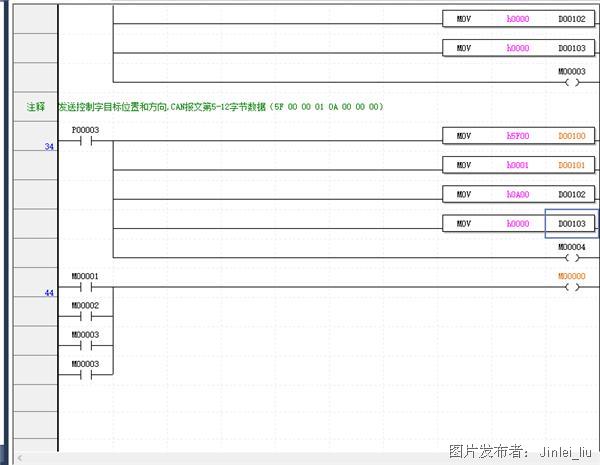
PLC主程序
以上所示为PLC主程序,其作用是在发送报文之前D00100、 D00101、D00102、D00103这4个字寄存器赋值,赋值完成后,触发中间继电器M00000,中间继电器M00000上升沿触发TCP/IP通信功能块(具体使用见P2P通信TCP/IP通信功能块调用部分)
6.3 TCP/IP通道设置
在主程序编辑窗口树形结构处双击“ ”自动弹出TCP/IP通道设置窗口,设置完成后单击确定按钮
”自动弹出TCP/IP通道设置窗口,设置完成后单击确定按钮
设置完成后单击确定按钮,返回程序编辑窗口。
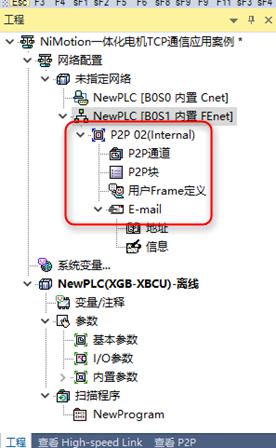
6.3.1建立P2P通信功能块
在主程序编辑窗口树形结构处右击“![]() ”选择“追加项目”弹出子窗口中选择“P2P通信”自动建立P2P通信功能块。
”选择“追加项目”弹出子窗口中选择“P2P通信”自动建立P2P通信功能块。

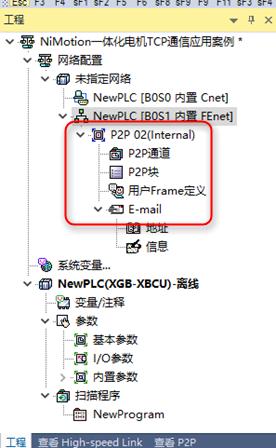
P2P通信功能块已建立
6.3.2 P2P通道设定
在主程序编辑窗口树形结构处双击“P2P通道”自动弹出“P2P通道设定窗口”。

P2P通道设定注释:
本例中报文为自定义报文,P2P驱动器选择用户Frame定义;
一体化闭环步进电机为TCP/IP通信协议客户端,选择Client;
端口号码:PLC TCP/IP通信硬件端口号;
相对站IP地址:一体化闭环步进电机作为TCP/IP通信客户端,IP与服务器在同一波段 192.168.250.100。
6.4用户自定义报文编写
6.4.1建立自定义报文
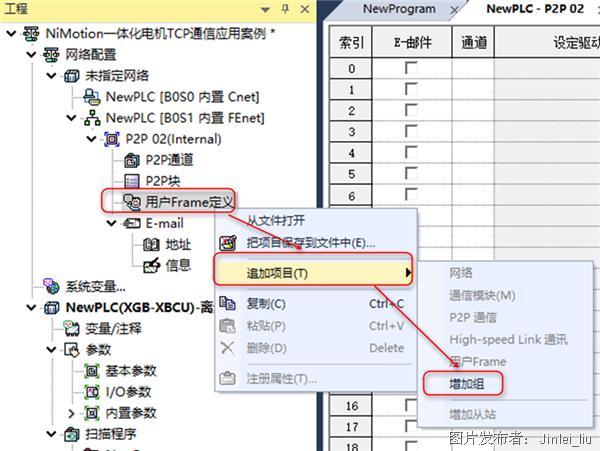
在树形结构右击“用户Frame定义”,选择“增加组”。
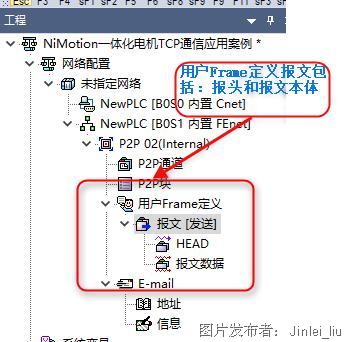
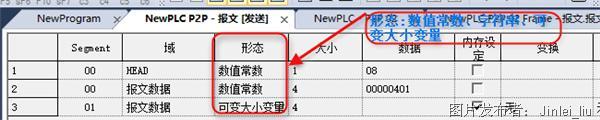
自定义报文组
自定义报文组注释:
Segment00:报头,帧信息;
Segment00:报文本体,帧ID;
Segment00:报头本体,帧数据
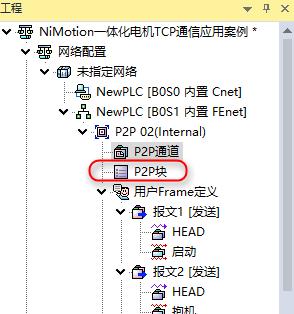
6.4.2 P2P通信TCP/IP功能块调用
在树形结构双击“P2P块”,进入P2P功能块调用窗口。

P2P通信TCP/IP功能块调用
P2P 通信TCP/IP通信功能块调用注释:
TCP/IP通信功能块选择上面已建立的0通道;
设定驱动器:用户自定义;
TCP/IP通信功能块P2P功能:SEND/RECEIVE;
TCP/IP通信功能块启动条件:BOOL变量M00000上升沿触发一次发送一条TCP协议报文;
TCP/IP通信功能块Frame:需要发送的报文。;
变量设定内容:读取从D00100开始的四个字寄存器值。
7 程序运行与监控
硬件连接完成确认正确后下载程序便可以通电调试。
下图是通过串口调试工具监控的本实例报文。
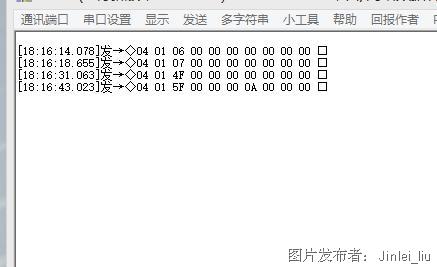
串口调试工具报文监控
依次发送以上四条报文到一体化闭环步进电机即可实现一体化闭环电机在位置模式下从当前位置相对运行10step。
8 总结
通过以上实例可知,NiMotion一体化步进电机,集成度高,比之前传统的运动方案能大幅减少接线且容易安装,能充分节省安装空间,防烧坏等损毁的保护措施,特别适合替代多个电机的设备使用,集成IO和同步功能, CANopen和Modbus总线连接,分布式控制。方便用户对生产流程的监控、数据采集并进行数据分析,从而形成高度灵活、个性化、网络化的生产链。满足工业4.0、工业互联网、物联网、云计算的发展需求,在节省用户成本的同时为用户的智能制造提供了一种替代传统步进电机的解决方案。
同时,北京立迈胜控制技术有限责任公司推出的SCM-ETHCAT提供了以太网转CAN通信协议的灵活解决方案,不再需要用户再去特殊定购昂贵的CAN总线通讯模块,只需用户上位机支持TCP协议就可以实现TCP/IP转CAN通信协议,不仅仅限制于PLC,CAN设备上位机还可以是支持TCP/IP的触摸屏、笔记本、工控机、单片机等等。
9 其他
l 电机的具体操作指令参考本公司的《一体化闭环步进电机CAN总线用户手册》
l 其他本手册的全部内容或部分内容禁止擅自转载、拷贝。
l 产品性能、规格及外观可能因为改进,会在不经预先通知的情况下发生变化,敬请谅解。
l 我们力求使手册的内容尽可能正确,如果您发现有什么问题或错误、遗漏之处,请与北京立迈胜控制技术有限责任公司联系。




 投诉建议
投诉建议
提交
一体化电机TCP通信应用案例

一体化闭环电机Modbus通信应用案例
一体化闭环步进电机 Modbus 通讯