






 投诉建议
投诉建议
 版权声明
版权声明其他资料

施耐德电气有色金属行业解决方案
LabVIEW新特性汇总及开发技巧分享
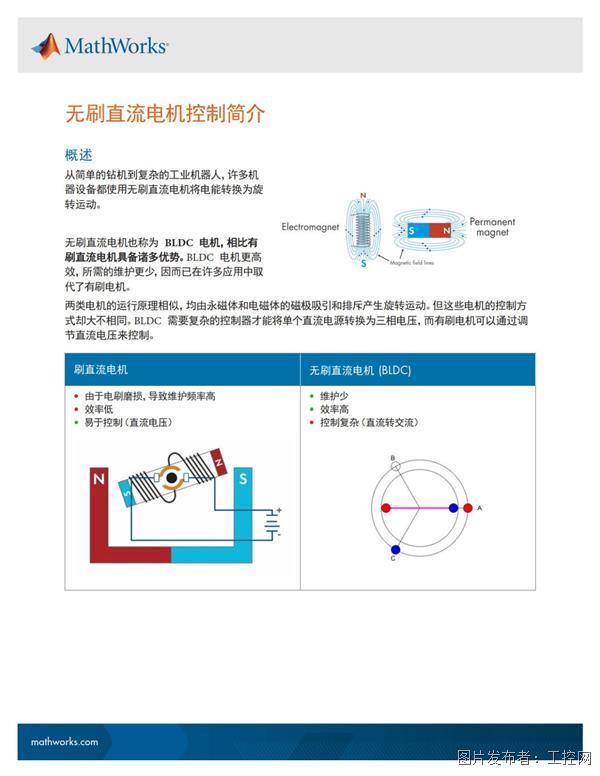
BLDC无刷直流电机必学基础资料
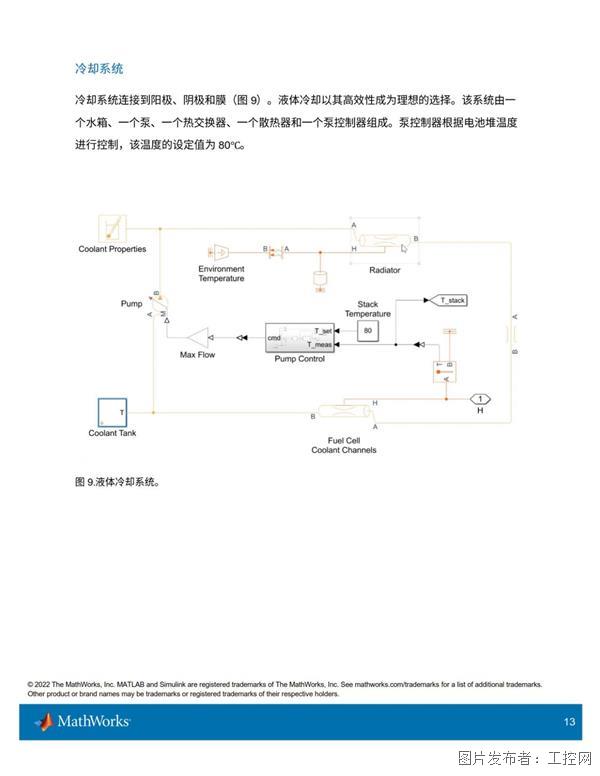
解密!如何使用系统级设计来设计燃料电池系统?
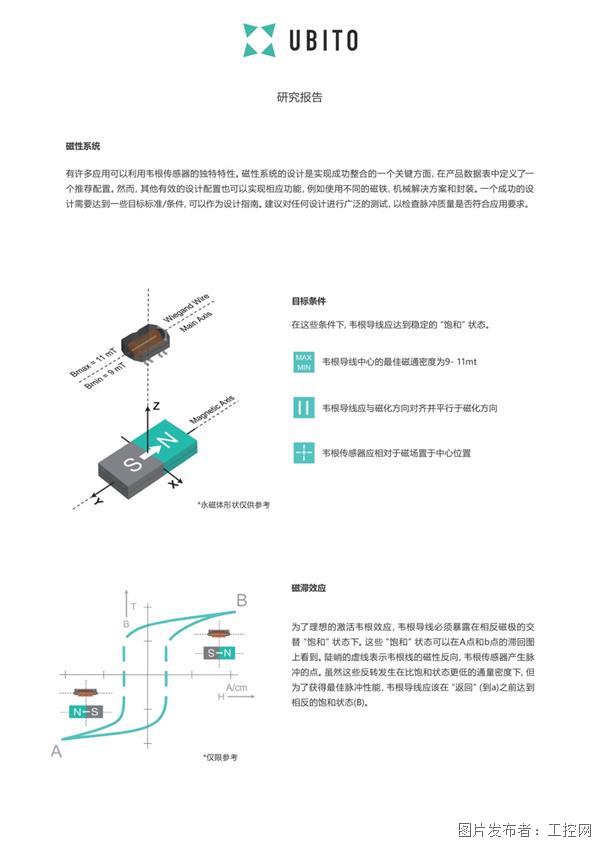
博思特 UBITO研究报告
施耐德电气有色金属行业解决方案
LabVIEW新特性汇总及开发技巧分享
BLDC无刷直流电机必学基础资料
解密!如何使用系统级设计来设计燃料电池系统?
博思特 UBITO研究报告
通过积分充值可以直接获取下载文档所用的积分,
换算比例:1元人民币可充100积分
当前下载文档需要:0积分
您现有积分:积分
您的工控网注册账号个人信息尚未补全, 补全个人信息即可获得积分
完善资料获得积分细则: