


GOCATOR 3D 智能传感器为机器人赋能
机器人在工业自动化领域中的应用正以极大的步伐向前发展。已有越来越多的制造商行动起来,让简单的重复性工作脱离人工,转而使用中小型的协作式机器人,以便发挥出它们的准确性和效率优势。
机械手的意义
虽然机器人也可以执行精细的任务,如视觉引导或基于动作的扫描,但经验告诉我们,眼下大多数机器人的自动化应用就是机械手,即需要机器人系统定位工件并将其从一个单元移动到另一个。这些工件可整齐或随机地排列在移动的传送带、叠放的料仓或托盘上。
此类系统通常会涉及到一个带有真空或气动抓取机制的机械臂,以便机器人能够接触不同表面上的工件并在避免碰撞的前提下有效地将工件运送到目标位置。一些专业化的应用则需要带有“手指”的机械抓取机构,以便能对工件进行拾取、操作和放置。
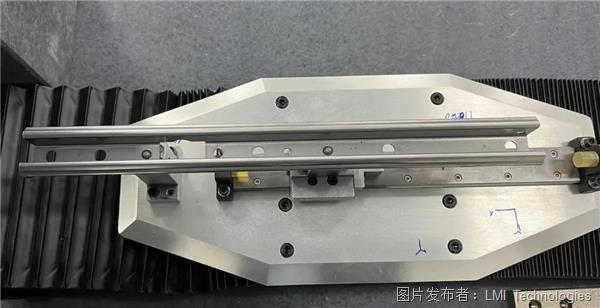
在此应用中,由一台集成 Braas UR 机器人的 Gocator 2340 直线剖面测量仪引导机械臂每次拾取一个出现的工件,然后按预定的顺序和位置进行放置,即使工件的具体位置和 3D 方向每次不同,也可完成任务。
让机器人更智能
机器人的智能程度不足以自行完成机械手应用。这是因为它们没有可以看的“眼睛”或可以思考的“大脑”。因此,机器人需要通过机器视觉来进行场景可视化,需要通过信息处理来进行控制决策,并需要执行精密的机械运动。
为提供这些关键的功能,制造商可为机器人搭配使用 3D 智能传感器,构建完备的自动化解决方案。
许多扫描应用都需要对工件的 360º 外形数据,而不是仅需要捕捉工件特定特性的一个观察点即可。为支持 360º,采用多传感器环形排列是一个理想的解决方案。此时,多个传感器排列在工件周围,可捕捉到工件的各个角度。
图 1 采用 Gocator 剖面闭合式区域工具,带有 360º 扫描视野的环形排列。
在工件穿过传感器环时,数据将“缝合”到整个的 3D 模型中,实现精确的体积测量。蛋白质分配是需要此类布局的一个应用示例。
肉类蛋白质分配
一片含蛋白质食品(例如,肉、奶酪)穿过激光直线剖面传感器环。每次扫描都用于计算横截面积。通过将各个面积组合起来,可以得到此蛋白质片的体积测量值。如要切割成具有特定目标重量的小片,您所需做的只是将体积数据乘以蛋白质的平均密度,然后将切割机设置为在达到阈值重量值时激活即可。
图 2 扫描一片蛋白质食品,确定总体积并传递经优化的下游切割决策。
按一套公共坐标系对齐
为支持多传感器环形排列,整个体系中的所有传感器都必须首先按一套公共坐标系对齐,以便确定相对的位置。为此通常会在扫描平面中引入一个已知的形状(例如四边形)。每个传感器会“看”到多边形的一个顶点。然后智能传感器便可计算每个传感器的位置,并将数据转化到公共坐标系中。传感器生成的每个 3D 点都会自动进行此转换。
图 3 使用四边形进行传感器对齐,四个传感器分别对应各顶点。
传感器提供的经转换的数据组成一个 3D 点云。此点云需要进行处理,并计算出诸如横截面积等的值。可通过编程来累加面积,并触发下游的控制决策,以便在达到目标重量时激活切割装置。
Gocator 固件 5.0
环形排列将在我们即将公开发布的 Gocator 固件 5.0 中全面支持,其中包括对齐和横截面积测定,从而打造一个可开箱即用的智能分配传感器!




 投诉建议
投诉建议
提交

应用分享 | Gocator 3D视觉应用于折叠屏手机3D检测

GoPxL 软件升级,打造全新用户体验

LMI Technologies 最新发布 Gocator 4000 系列智能 3D 同轴线共焦传感器
Gocator 多传感器组网 360°一键标定 ,自动拼接!

光伏检测中的出圈选手,是他!