


别碰这些陷阱!闭环系统辨识,教你挖出高精度模型
Q:工业控制与自动化领域中建模的核心技术是什么?
A:系统辨识(System Identification)。
Q:为什么在反馈控制(闭环)场景下辨识任务变得尤为复杂?
A:因为不仅需要克服噪声干扰,还需解决闭环耦合效应带来的辨识偏置。
Q:本文可以为你带来什么?
A:深入探讨闭环辨识的关键技术和陷阱,助你在强反馈环境下“挖出”高精度模型。
Part.1
闭环辨识vs开环辨识:核心差异

(闭环系统)

(闭环&激励系统)
闭环辨识的独特性
01
数据相关性
输入信号与输出噪声因反馈存在统计相关性,导致传统开环最小二乘法失效。
数学表达:闭环系统中,输入输出关系可写为:

其中控制器满足:

02
可辨识性条件
闭环系统需满足持续激励(Persistent Excitation)条件。
不加激励会怎么样?
若设定值set=0,干扰interference=0

若无激励计算结果其实和模型一点关系没有。
持续激励的数学本质是什么?
闭环系统的输入信号需满足:
1、 频谱充要条件
输入信号功率谱

(在系统频带内非零),且覆盖被控对象的关键频段。
2、秩条件(针对参数化模型)
对模型阶次 ,输入信号需使数据矩阵满秩:

激励信号加在哪里?
设定值(Reference, r(t))
激励信号r(t)经过控制器C后再进入被控对象G(低频激励会被积分控制抑制)。
1. 在参考信号中加入斜坡分量补偿
2. 临时降低控制器积分增益(实验后复原)
控制量(Controller Output, u(t))
激励信号r(t)绕过控制器直接作用到被控对象G。大幅扰动可能损坏执行器,执行器有足够安全裕度。
激励的本质是用最小的扰动代价换取最大的信息量!
Part.2
高精度闭环辨识的关键环节
模型集选择(Model Set)
01
ARX模型
(工程上易用但需考虑降阶):

02
BJ模型
(分离过程/噪声模型):

计算方法:克服闭环偏置的核心算法
01
直接辨识法(Direct Identification)
直接使用闭环数据,但需采用辅助变量(IV)或预测误差法(PEM)消除偏置。
02
预测误差法(PEM)目标函数

其中预测误差如下:

03
间接辨识法(两步法)
辨识闭环控制器模型

反推被控对象模型

适用场景:控制器已知且线性时不变(LTI)系统。
噪声模型辨识:精度提升的胜负手
闭环系统中噪声需精确建模,否则将导致参数方差过大。公式如下:

Part.3
避免“掉坑”
若控制器带宽过高(如PID强积分),可能导致低频激励不足→模型低频段可信度低。
在闭环场景下完成辨识任务,核心在于克服反馈耦合与噪声干扰的双重挑战,精准“抓取”被控对象的真实动态。通过精心设计持续激励信号、选用适配的模型结构(如BJ、ARX)、并运用偏置算法(如PEM、IV)消除闭环影响,方能突破传统局限,在强反馈环境下挖掘出高精度的可靠模型,为先进控制奠定坚实基础。




 投诉建议
投诉建议
提交
半导体人的硬核队友,稳了!
青铜退散!效率飙升500%,直接带你上王者
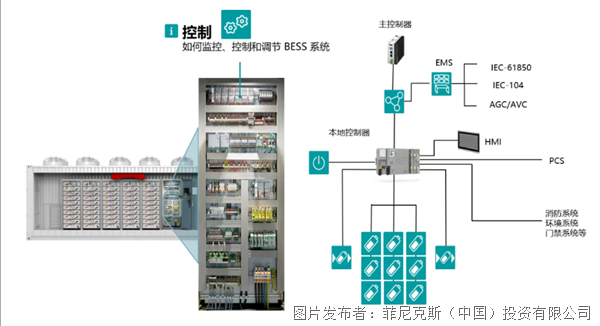
如何破解“看天吃饭”魔咒,让绿电“风光无限”?
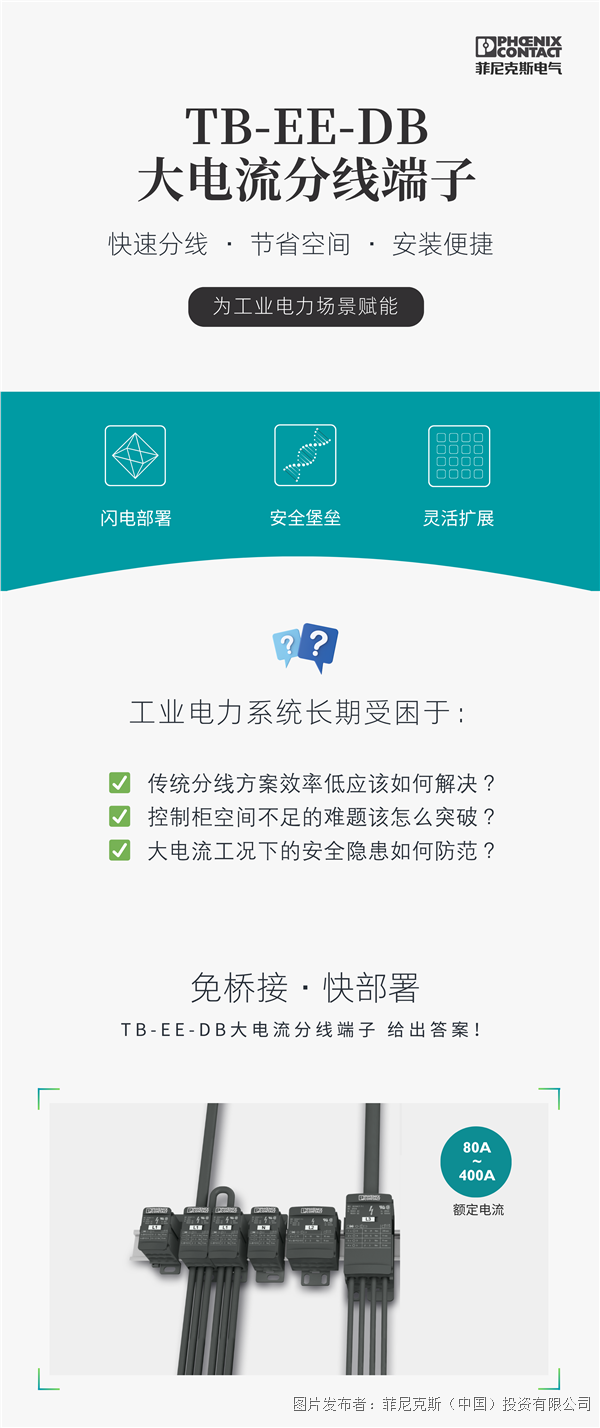
新品速递|菲尼克斯电气TB-EE-DB大电流分线端子来了,工业党这波必须冲!
新能源人速进!直流微网HDC开关,三大核心buff叠满