


北京宝伦数控DMC18x2运动控制器

PCI总线DMC-18X2运动控制器是美国GALIL公司专为低成本应用领域而设计.最主要且常用的功能,例如:多任务程序存储、符号化变量和数组、通用数字I/O、步进电机和伺服电机接口任意组合等等。
产品分类:运动控制 运动控制器 PC运动控制卡
品牌:宝伦数控
产品介绍
DMC-18X2 销量最大、实惠多多的
PCI总线 1-4轴运动控制器
概述:
PCI总线DMC-18X2运动控制器是美国GALIL公司专为低成本应用领域而设计。其性能规格类似于Optima 系列,只是为了降低成本而取消了一些不十分常用的功能(例如:模拟量输入、第二FIFO、光隔及辅助编码器接口等),但保留了一些最主要且常用的功能,例如:多任务程序存储、符号化变量和数组、通用数字I/O、步进电机和伺服电机接口任意组合等等。
DMC-18X2运动控制器采用32位微处理器,可控制1~4轴,其本身具有多轴直线插补、圆弧插补、轮廓控制、电子齿轮和电子凸轮(ECAM)等功能,板上有2M Flash 可擦写存储器及2M RAM,可存储用户程序、数量、数组和控制程序,并可脱机运行。
DMC-18X2运动控制器与外部接口采用100Pin高密度屏蔽电缆。北京宝伦数控专为广大用户设计的PICM-3900S互联模块将电缆转换成D型插头直连方式,并对全部I/O进行光隔处理,方便了用户的连接,具体说明见(四)配套附件。
一、 主要性能:
运动控制
●JOG、定位、轮廓、直线/圆弧插补、电子齿轮、ECAM
●伺服回路采样速率:62.5μs/轴(更快速率可选)
●编码器反馈速率:12MHZ;步进电机指令:3MHZ
●带有速度、加速度前馈,偏置和积分限制的软件PID控制
●消除冲击的运动平滑处理
●直线/圆弧插补含有椭圆缩放、拐角减速过渡、无限线段进给、进给率控制等功能
●两轴联动轴可同时执行(多任务)
●无刷电机正弦波换向控制
●8路通用输入和输出(I/O,8/8)
●各轴原点返回,正、负向限位功能。
●各轴高速位置捕获和位置比较
●急停
编程应用
●板上2M Flash 存储器,可储存应用程序变量和数组
●可对时间、位置、速度、输入快速响应的可编程事件触发器
●上电后程序自动执行
●200多条基本命令、简单易学、一般应用无需开发、只要编程即可运行
●多任务功能可同时执行8个应用程序
●控制软件Flash存储,便于升级
●WSDK软件工具用于伺服性能自动调整和分析,ActiveX控制用于VB编程
●扩展DLL和文件用于C/C++高级应用编程
●驱动软件适用于DOS、QNX、Windows3.1,NT,95,98,2000 和Linux
●二进制通信模式
三、规格
系统处理器和存储器
●Motorola 32位微处理器
●2M具Flash 存储器用于储存用户程序、变量、数组和控制程序
●2M RAM
通信接口
●DMC-18X2带双向FIFO的PCI总线
命令以ASCII码传送,二进制通信方式也可作为标准性能
运动方式
●点-点定位控制
●JOG
●带有进给倍率的2D直线/圆弧插补
●多轴直线插补
●垂直于平面的跟踪控制
●螺旋线插控制
●具有可设置多个主动轴的电子齿轮控制
北 京 宝 伦 数 控
POWERLAND Technologies
3
●龙门驱动同步控制
●轮廓控制
●示教控制
存储功能
●应用程序存储空间:1000行X 80字符
●254个变量
●30个数组中8000个数组元素
控制算法
●带有速度、加速度前馈的PID控制算法
●消减冲击的速度平滑处理算法
●积分限制算法
●转矩限制
●偏置调整
运动范围
●位置:32位(+/-21.5亿计数单位、自动翻转、JOG或矢量方式无限制)
●速度:32位(伺服电机:1200万计算单位/秒)
●加速度:32位(6700万计算单位/秒2
通用数字I/O
●8路输入(已带缓冲处理)
●8路输出
高速位置锁存
●4路锁存输入用于X、Y、Z、W轴(响应速度:<0.1μs)
专用输入(适用各轴)
●主编码器输入:A、A*、B、B*、I、I*(+/-12V或TTL)
北 京 宝 伦 数 控
POWERLAND Technologies
4
●正、负向限位输入(已带缓冲处理)
●回原点输入(已带缓冲处理)
●高速位置锁存输入
专用输出(适用各轴)
●16位DAC模拟指令输出
●用于步进电机的指令脉冲和方向输出
●伺服使能输出
●报警输出
●高速位置比较输出
伺服回路采样速率
●1~2轴:125μs
●3~4轴:250μs
编码器反馈最大速率
●12 MHZ
步进电机最大指令速率
●3 MHZ(整步、半步或微细分)
电源消耗
●+5V 750mA
●+12V 20mA
●-12V 20Ma
环境
●工作温度:0~70°C
北 京 宝 伦 数 控
POWERLAND Technologies
5
●湿度:20~95% RH,无凝结
尺寸
●1~4轴:107.442 X 228.6mm2
三、配套附件
1、PICM3900-S-OPTO互联模块
PICM3900-S-OPTO互联模块是为了使用美国GALIL公司的DMC-2000/2100/1200/1700/1800/18x2/18x6/9542系列数字运动控制器的广大用户便于连接而进行小型化设计的新产品。。该模块(J1)通过100Pin 信号电缆与DMC 数字运动控制器相连接;用户通过4个26Pin 的D 型连接器与伺服驱动器或步进驱动器相连接来控制四个轴(X、Y、Z、W); 1个37Pin 的D 型连接器(J2)与外部输入/输出信号相连接,其中包括8个通用输入点、4个轴的正/负限位/回零输入信号以及控制器复位和急停输入信号、8个通用输出点和控制器的报警输出信号、1个CMP 输出比较信号;1个9 Pin 的D 型连接器(J3)8个模拟量输入信号;1个3Pin 端子(J4)DC24V 电源输入信号。同时对所有TTL 电平输入/输出信号进行光电隔离电路处理,提高了整个系统的抗干扰能力,用户也可以很方便地实现外部信号与DMC 数字运动控制器之间接口。每件PICM3900-S 提供与4个坐标轴信号接口;当用户使用4 坐标轴以上DMC 数字运动控制器时,需要选用2 件PICM3900-S-OPTO互联模块。
北 京 宝 伦 数 控
POWERLAND Technologies
6
PICM3900-S-OPTO互联模块
2、PICM-2900S互联模块
PICM-2900S互联模块是为使用美国GALIL公司DMC2000/2100/1200/1700/1800/18X2/21x2/13x8系列数字运动控制器的广大用户便于连接而设计的新产品。该模块通过100针信号电缆与DMC数字运动控制器相连接,用户通过Phoenix连接端子与外部信号相连接。同时对所有TTL电平输入/输出信号进行光电隔离处理,提高了整个系统的抗干扰能力,用户也可以很方便地实现外部信号与DMC数字运动控制器之间接口。每件PICM-2900提供与4个坐标轴信号接口,当用户使用4轴以上DMC数字运动控制器时,需要选用2件PICM-2900。
北 京 宝 伦 数 控
POWERLAND Technologies
7
PICM-2900S互联模块
3、PDB-14064 I/O扩展板
PDB-14064 I/O扩展板能够为GALIL的DMC-9542/18X6/18x2/1840/1880系列数字运动控制器提供多达40路输入信号,24路输出信号。 同时对所有TTL电平输入/输出信号进行光电隔离电路处理,提高了整个系统的抗干扰能力,并具有低价位、高性能、小尺寸、可靠性高、应用编程简单、使用方便、可大大节省安装空间。
PDB-14064 I/O扩展板
北 京 宝 伦 数 控
POWERLAND Technologies
8
五、订货信息
订货号
DMC-1812 1轴
DMC-1822 2轴
DMC-1832 3轴
DMC-1842 4轴
Cable-100-1M 1米互联电缆, 用于连接控制卡与互联模块
Cable-100-4M 4米互联电缆, 用于连接控制卡与互联模块
PICM3900-S-OPTO 互联模块(适用于各轴)
PICM-2900S 互联模块(适用于各轴)
MOD-37-F 37Pin转接板(用于PICM3900-S-OPTO)
CABLE-37-1M 1米37Pin转接板用电缆
CABLE-37-1.5M 1.5米37Pin转接板用电缆
DB-14064 I/O扩展卡(扩展40点输入,24点输出)
Cable-37/34P-0.26M 0.26米37Pin转34Pin电缆,用于连接扩展输出
Cable-44/50P-0.26M 0.26米44Pin转50Pin电缆,用于连接扩展输入
基本软件工具
WSDK 伺服参数调整软件
DMCSmartTerm
DMCSetup
GalilTools
ActiveX Tool kit
六、应用举例
DMC-18X2运动控制器在不同场合下得到了各种各样的应用,如用旋转刀切割材料在显微镜下对半导体晶片定位、同步贴标器等等。下面就不同场合的应用编程举例如下:
1. 抓、放(pick & place)
自动IC插装机用来在XY平台上把元件抓起,然后放在电络板的适当位置。用
北 京 宝 伦 数 控
POWERLAND Technologies
9
PC-based控制器沿直线方向将XY工作台移动到所规定的位置。抓放头用Z轴控制,在移动当中使抓放头上升,在放置期间使抓放头下降。
1). 要求:系统分辨率:0.1μm
精度:1μm
速度:40,000cts/s
PC-based
2). 选用元件:DMC-1730:3轴ISA总线运动控制器
PICM-2900:互连模块
WSDK:设置用伺服设计软件
3). 工作过程
用运动控制器在坐标点X1,Y1抓起一个元件并将它放在坐标点X2,Y2。只要指定坐标值,控制器就按直线驱动XY工作台到达抓起位置,一到达抓起位置,由Z轴控制的抓放头就下降,并使夹持线圈接通;接着,抓放头上升,工作台移动到新位置,使抓放头下降;最后释放线圈,再使抓放头上升。
运动程序包括两个部分, 首先,执行#INITIAL,使系统初始化。而由程序#PICK执行相关运动。
特别是控制器计算起始位置X0,Y0和抓放位置X1,Y1之间的差值DX和DY, 然后就用指令VP,DX,DY命令XY轴按照直线移动。移动一完成,Z轴下降,输出位1有效使线圈带电。重复以上过程把电机移动至新的坐标点。以下程序给出指令。
例1.抓、放元件
指令 说明
#INITIAL 标号
HMXY 驱动X、Y轴回零
BGXY 起动运动
AMXY 等待完成
X0=0 定 义起始位置为0
Y0=0 定义起始位置为0
#PICK 标号
DX=X1-X0 求X差值
北 京 宝 伦 数 控
POWERLAND Technologies
10
DY=Y1-Y0 求Y差值
VP DX,DY 命令运动
VS 40000 矢量速度
VA 200000 矢量加速度
VD 200000 矢量减速度
VE 运动终点
BGS 起动XY运动
AMS 等待运动完成
PR,,-50000 抓放头下降(Z轴)
SP,,20000 Z速度
AC,,80000 Z加速度
DC,,80000 Z减速度
BGZ 起动Z轴运动
AMZ 等待Z轴运动完成
SB1 设定输出位(线圈)
WT 20 等待20ms
PR,,50000 抓放头抬起
BGZ 起动Z轴运动
DX=X2-X1 计算X差值
DY=Y2-Y1 计算Y差值
VP DX,DY 运动命令
VE
AMZ 等待Z完成
BGS 起动XY运动
AMS 等待XY完成
PR,,-50000 抓、放头下降
BGZ 起动抓、放头运动
AMZ 等待Z运动完成
CB1 清除输出位(释放线圈)
北 京 宝 伦 数 控
POWERLAND Technologies
11
WT 20 等待20ms
PR,,50000 抓、放头上升
BGZ 起动Z轴运动
X0=X2 更新起始X位置
Y0=Y2 更新起始Y位置
EN 程序结束
2. 定长裁切(Cut-to-Length)
将塑料条从馈料滚拉出,且必须切割成所需长度,切片数必须是可编程的。通过使传送
带前进到所指定的距离,使切刀动作即可实现这种操作。操作必须是独立的,操作人员有一个手持盒,用来选择长度和切片数量。
1). 要求: 切长范围:6 "~ 36 "
系统分辨率:0.0002 " 即5000cts/inch
旋转速度:12in/s
加、减速度:200in/s2
切割间隔:200ms
要求精度:±0.001 "
独立型
2). 选用元件: DMC-1412:单轴工业控制器
AMP-1460:功率放大器/互连模块
TERM-1500H:手持盒
WSDK:设置用伺服调整软件
3). 工作过程
DMC-1412独立型单轴控制器能让操作人员以英吋输入长度L和切片数N。要想起动操作,只要与输入口1相连的开关接通(ON)即可。切割循环含有由切割间隔相随的运动间隔。实际切刀通过DMC-1412上的输出口2来控制。当切割数完成或输入口1关断时操作均结束,与其出现次序无关。
由于操作是单轴、独立的,所以选用控制器DMC-1412和操作盒TERM-1500-H。 将下面的控制程序通过RS232口下装到DMC-1412并存入非易失性存储器。
北 京 宝 伦 数 控
POWERLAND Technologies
12
例2.定长裁切
指令 说明
#AUTO 标号
IN“ENTER CUT LENGTH IN INCHES”,L 提示操作人员
IN“ENTER NUMBER OF CUTS”,N 提示操作人员
#WAIT 标号
JP#WAIT,@IN[1]=0 等待输入 口1变高
C=0 对切割计数器初始化
#LOOP 标号
PR L*5000 将英时转换成计数单位
SP 60000 速度cts/s
AC 1000000 加速度cts/s2
BGX 开始运动
AMX 等待运动完成
SB2 使切刀有效,设置输出口2为高
WT 200 等待200ms
CB2 使切刀无效,清除输出口2
C=C+1 使切刀计数器加1
JP#E,C=N 若完成,则退出
JP#LOOP,@IN[1]=1 若输入1仍为高,则重复
#E 退出
EN 程序结束
速度
北 京 宝 伦 数 控
POWERLAND Technologies
13
t
输入口1 5V
0
输入口2
20ms
3. 旋转切刀(Rotating Knife)
旋转切刀系统(如图所示)用来将纸张或塑料输送带切成给定长度。输送带独立运动,而切刀与其同步,这样,在切割期间,刀片与输送带以相同的线速度运动。当切割完成时,切刀以产生所需切长的方式前进或后退。
这种方法稍作修改,即可用于在运动中的输送带上印字或贴标签。
1). 要求
输送带速度:0~120in/s,单独运动(主动轴)
切刀周长:(π×直径)=20in
切长:16~40in,可变
输送带编码器分辨率:1000cts/in
切刀轴分辨率:10000cts/rev 即500cts/in
要求精度:0.005 in 无积累误差
用一台电机驱动切刀,附加编码器检测输送带的移动位置。
2). 工作过程
假设:所需切长为16in,这就意味着,传送带每移动16in,转刀必须转一圈。另外,当切刀与输送带处于接触时,刀片速度必须与输送带的线速度相同。例如,假定,切刀和
北 京 宝 伦 数 控
POWERLAND Technologies
14
输送带必须在4in行程以外就同步运动,这就是说,在循环的剩余部分以外,输送带移动12in,刀片移动16in,这表明速度比在各循环之外变化,(如图中所示)。对应的切刀位置用最下面的图加以说明。主动轴位置(输送带)与从动轴位置(切刀)之间的这种关系称之为ECAM。
为了建造凸轮表,注意:整个运动由4个间隔组成:
间隔1 输送带运动 切刀运动 齿轮比
1 4000 2000 常数
2 4000 2500 变数
3 4000 3000 常数
4 4000 2500 变数
对上述间隔适于采用GALIL ECAM程序产生凸轮表,要想减少程序长度,只有将凸轮表的大小减到16个点。
要使系统工作,就把切刀转到切割间隔的起始点,并执行程序。
例3.旋转切刀
指令 说明
#CAM 标号
EAX 定义X轴为主动轴
EM 16000,10000 表周期
ET[0]=0,0;ET[1]=1000,500
ET[2]=2000,1000;ET[3]=5000,1500
ET[4]=4000,2000;ET[5]=5000,2531
ET[6]=6000,3125;ET[7]=7000,3781
ET[8]=8000,4500;ET[9]=9000,5250
ET[10]=10000,6000;ET[11]=11000,6750
ET[12]=12000,7500;ET[15=15000,9469
ET[16]=16000,10000
DP0,0 定义起始点
EB1 CAM功能有效
EG,0 啮合CAM
北 京 宝 伦 数 控
POWERLAND Technologies
15
切刀
输送带
图1. 旋转切刀系统
切刀速度
2000 2500 3000 2500
10000
切刀位置
7500
4500
2500
0 4000 8000 12000 16000 输送带位置
图2. 需要的运动轮廓
4.输送带张力控制
北 京 宝 伦 数 控
POWERLAND Technologies
16
输送带加工应用经常需要张力控制,在最需要的场合下,由一个可以连续或者起/停的独立运动带动输送带。用一个压轮来检测输送带的张力,要求在恒定张力下从馈料滚提供输送物。同样的过程也适用于在恒定张力或变张力下将输送物缠绕在一个收料滚上。
1). 要求:
主动轴速度:0~20in/s,起动/停止
主动编码器分辨率:400cts/in
馈料滚直径:3.5~16in
馈料滚编码器分辨率:10,000cts/rev
压轮传感器输出:0~10V对应0~20 oz
张力精度:±0.5 oz
2). 选用元件
DMC-2020:控制器
PICM-2900:互连模块
WSDK:伺服设计软件
3). 工作过程
由主动轴所拉出的输送物长度通过一个分辨率为400cts/in的编码器来监测,馈料滚由一台装有测速机和10,000cts/rev编码器的电机来驱动,电机由外面的放大器驱动。由于属于大惯量负载,为了提高稳定性,把放大器配置成速度方式。
馈料滚运动分为两部分:粗运动和精运动,粗运动通过把馈料滚啮合到主动轴并不断测算齿轮比来实现,这种方式执行大多数所需要的运动,由于不能精确地
知道齿轮比,因此不是全部运动。
精运动由叠加在电子齿轮信号上的修正运动所组成,监测张力误差,并驱动电机以得到正确的速度。
假设已知初始齿轮值G,初始值可由计算或直接测量得出。通过确定两个编码器的频率之比并对其滤波来连续测算齿轮比。
在下面的程序中,馈料滚电机由X轴来控制,主动轴由Y轴来监测。程序由两部分组成:#GEAR,测算齿轮比然后执行粗运动,和#TRIM,执行精运动。两个程序用多任务方式同时执行。
压轮信号加到模拟输入口#1,所需的传感器量程是4V,传感器输出与4之间的差值
北 京 宝 伦 数 控
POWERLAND Technologies
17
E是代表张力的误差。需要电机以20倍E的速度运动。
例4.输送带张力控制
指令说明
#INITIAL 标号
G=0 定义G
GAY 设定Y为主动轴
GRG 初始化齿轮比
JG0 初始化JOG速度
BGX 开始运动
XP=_TPX 读取初始X位置
YP=_TPY 读取初始Y位置
#GEAR
Y=_TPY 读取新的Y
X=_TPX 读取新的X
JP#GEAR,Y=YP 若Y没有运动就重复
DX=X-XP 计算X增量
DY=Y-YP 计算Y增量
XP=X 更新X位置
YP=Y 更新Y位置
RATIO=DX/DY 求增量比
G=(G*7+RATIO)/8 测算齿数
GRG 更新齿数
JP#GEAR 重复循环
EN
#TRIM 标号
E=@AN﹝1﹞-4 求张力误差
JG E*20 求精JOG速度
JP#TRIM 重复
EN 程序结束
北 京 宝 伦 数 控
POWERLAND Technologies
18
馈料滚X
压轮
三、产品型号
DMC-1812 1轴
DMC-1822 2轴
DMC-1832 3轴
DMC-1842 4轴
CB-50-100-1886 50-100Pin转接板,用于5-8轴
Cable-100-1M 1米互联电缆,用于连接控制卡与互联模块
Cable-100-4M 4米互联电缆,用于连接控制卡与互联模块
PICM3900-S-OPTO 互联模块(适用于各轴)
PICM-2900S 互联模块(适用于各轴)
MOD-37-F 37Pin转接板(用于PICM3900-S-OPTO)
CABLE-37-1M 1米37Pin转接板用电缆
CABLE-37-1.5M 1.5米37Pin转接板用电缆
DB-14064 I/O扩展卡(扩展40点输入,24点输出)
Cable-37/34P-0.26M 0.26米37Pin转34Pin电缆,用于连接扩展输出
Cable-44/50P-0.26M 0.26米44Pin转50Pin电缆,用于连接扩展输入
北 京 宝 伦 数 控 技 术 有 限 公 司
POWERLAND Technologies Co.
公司总部: 地址:北京市海淀区上地三街9号嘉华大厦F座10层 邮编:100085
电话:010-82840851,82840855,82890324,82890854 传真:010-82841734
Internet: www.power-land.com E-mail:sales@power-land.com
北 京 宝 伦 数 控
POWERLAND Technologies




 投诉建议
投诉建议
提交

第30届中国玻璃展(北京)将于2019年05月22日至25日开幕

Galil-北京中宝伦自动化 DMC1842使用手册(英文)
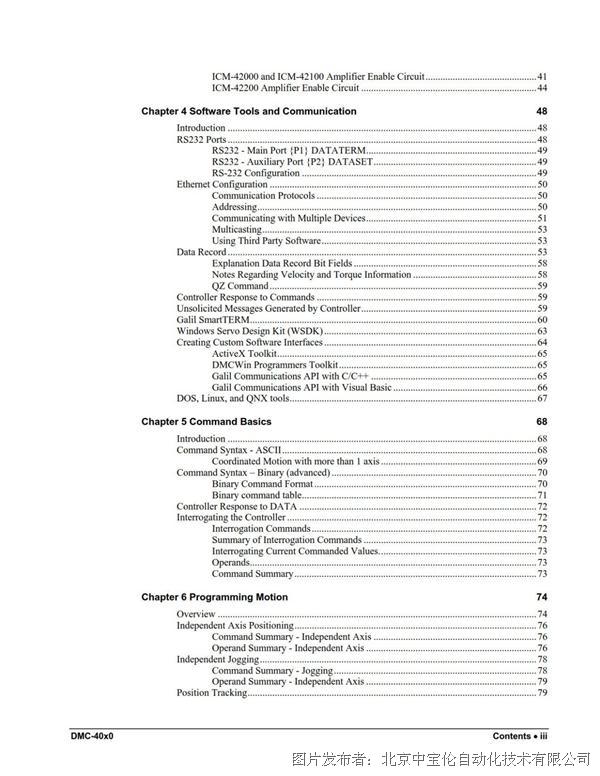
Galil-北京中宝伦自动化 DMC40x0使用手册(英文)
Galil 北京中宝伦自动化 DMC-18x6(英文)
Galil 北京中宝伦自动化 DMC-C640选型样本