


设计耐用且容错的运动控制反馈系统(一)
2008/5/27 16:19:00
为成功设计出鲁棒且容错的运动控制系统设计,设计工程师必须了解接收器IC、编码器信号电缆、终端匹配和PCB设计的重要性。本文将对运动控制系统设计中的关键问题进行讨论。
成功的设计工程师必须了解接收器IC、编码器信号电缆、端接和PCB布局所充当的重要角色。如今,要求颇高的工业应用需要鲁棒而可靠的机器人和自动化机器能在恶劣的条件下一周七天一天24小时地全天候工作。
值得庆幸的是,现代化的高速伺服系统可以被设计为一个鲁棒且容错的运动控制反馈系统。运动控制器的接收器电路能预先对潜在错误作出响应,并且接收器电路的合理PCB布局可以防止编码器数据中的噪声问题。设计工程师还应该考虑包括接收器电路端接在内的正交编码器的信号布线系统。这些预防措施将使鲁棒的运动控制反馈系统在错误状态下能稳定运行并是可预测的。
当今的许多性能改进都得益于新技术和微电子学。这些创新技术通过消除机器人在共享工作空间的碰撞问题、改进任务分配并提高伺服准确度,提供了更鲁棒的自动系统。鲁棒的系统运行的关键在于如何处理机械和电气故障。本文讨论鲁棒且容错的运动控制系统的设计,该系统的反馈通道采用正交编码器。
伺服系统
现代化的自动系统在采用闭环反馈作为运动控制。它们通常包括一个伺服系统,该伺服系统将马达驱动和反馈元件结合起来,以准确、稳定地控制速度和位置。图1显示了典型伺服系统中的各种系统级元器件。
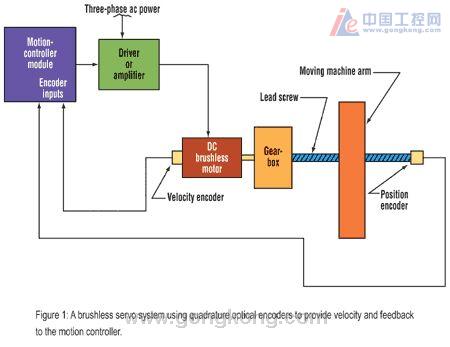
直流无刷马达是高性能和高速度应用的首选。直流电刷马达和步进马达适用于速度较低且要求较低的应用。本文讨论的设计均采用无刷马达。这种马达通常在其终端传动轴上附带正交编码器,该编码器可以确定传动轴速率和转码点以控制马达的线圈转换序列。机器的旋转传动轴上的另一个正交编码器提供该传动轴的位置数据,该数据通常会由于齿轮头和丝杠组合的齿隙引起的误差而与马达传动轴的实际位置有所不同。
典型的运动控制器卡和模块包括一个运动控制IC、一个微处理器和一个用于处理高速编码器信号的DSP或定制ASIC。该控制器将速度和旋转方向信号提供给驱动器或放大器,令它们提供适当级别的电压和电流(功率)来操作马达。为了设计带有反馈的鲁棒且容错的运动控制系统,在系统级设计阶段考虑下列问题:控制器编码器输入电路(接收器电路);接收器电路的PCB设计;编码器信号布线系统。在设计容错反馈系统时,还应考虑运动控制器的输入(比如硬线连接的紧急停止)和输入限制等。
控制器的接收器电路
马达的正交编码器沿着电缆将六个RS-422/RS-485信号(A、A-;B、B-;Index、Index-)发送至运动控制器的接收器电路(编码器输入)。接收器将RS-422信号转换成逻辑电平信号(我们之所以采用RS-422信号,是因为系统只有一个发射器)并将这些信号提供给运动控制器电路进行处理。接收器电路必须对伺服系统环境中的各种故障作出响应,包括开路、短路和噪声。
图2显示了典型运动控制器中的编码器输入接收器电路。MAX3095是带有±15 kV ESD保护的10 Mbps、5V、四路RS-422/RS-485接收器。对于带有连接至外部元件的编码器输入的容错系统,ESD保护是必需的。在本电路中,所有编码器输入线路上的ESD保护都在器件内部。没有外部ESD保护元件可大大减少电路所需的PCB面积。
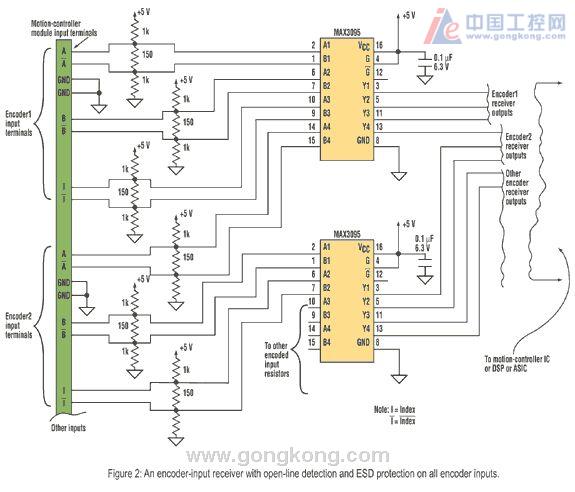
150Ω电阻可以为从正交编码器沿着双绞线电缆传输的每对补偿信号对提供适当的终端匹配。电缆发生断裂或中断连接会产生开路故障,必须检测到该故障之后,活动控制器才能执行适当的操作。作为故障保护测量方法,当一对输入信号开路时,MAX3095接收器会输出逻辑高作为响应。用1kΩ的电阻对接收器的“A”输入进行偏压,使其超过“B”输入至少200mV。这些电阻对在存在输入终端电阻的情况下维持故障保护输出也是必需的。本电路提供ESD保护、开路检测和输出短路保护,但它不检测短路输入。
成功的设计工程师必须了解接收器IC、编码器信号电缆、端接和PCB布局所充当的重要角色。如今,要求颇高的工业应用需要鲁棒而可靠的机器人和自动化机器能在恶劣的条件下一周七天一天24小时地全天候工作。
值得庆幸的是,现代化的高速伺服系统可以被设计为一个鲁棒且容错的运动控制反馈系统。运动控制器的接收器电路能预先对潜在错误作出响应,并且接收器电路的合理PCB布局可以防止编码器数据中的噪声问题。设计工程师还应该考虑包括接收器电路端接在内的正交编码器的信号布线系统。这些预防措施将使鲁棒的运动控制反馈系统在错误状态下能稳定运行并是可预测的。
当今的许多性能改进都得益于新技术和微电子学。这些创新技术通过消除机器人在共享工作空间的碰撞问题、改进任务分配并提高伺服准确度,提供了更鲁棒的自动系统。鲁棒的系统运行的关键在于如何处理机械和电气故障。本文讨论鲁棒且容错的运动控制系统的设计,该系统的反馈通道采用正交编码器。
伺服系统
现代化的自动系统在采用闭环反馈作为运动控制。它们通常包括一个伺服系统,该伺服系统将马达驱动和反馈元件结合起来,以准确、稳定地控制速度和位置。图1显示了典型伺服系统中的各种系统级元器件。
直流无刷马达是高性能和高速度应用的首选。直流电刷马达和步进马达适用于速度较低且要求较低的应用。本文讨论的设计均采用无刷马达。这种马达通常在其终端传动轴上附带正交编码器,该编码器可以确定传动轴速率和转码点以控制马达的线圈转换序列。机器的旋转传动轴上的另一个正交编码器提供该传动轴的位置数据,该数据通常会由于齿轮头和丝杠组合的齿隙引起的误差而与马达传动轴的实际位置有所不同。
典型的运动控制器卡和模块包括一个运动控制IC、一个微处理器和一个用于处理高速编码器信号的DSP或定制ASIC。该控制器将速度和旋转方向信号提供给驱动器或放大器,令它们提供适当级别的电压和电流(功率)来操作马达。为了设计带有反馈的鲁棒且容错的运动控制系统,在系统级设计阶段考虑下列问题:控制器编码器输入电路(接收器电路);接收器电路的PCB设计;编码器信号布线系统。在设计容错反馈系统时,还应考虑运动控制器的输入(比如硬线连接的紧急停止)和输入限制等。
控制器的接收器电路
马达的正交编码器沿着电缆将六个RS-422/RS-485信号(A、A-;B、B-;Index、Index-)发送至运动控制器的接收器电路(编码器输入)。接收器将RS-422信号转换成逻辑电平信号(我们之所以采用RS-422信号,是因为系统只有一个发射器)并将这些信号提供给运动控制器电路进行处理。接收器电路必须对伺服系统环境中的各种故障作出响应,包括开路、短路和噪声。
图2显示了典型运动控制器中的编码器输入接收器电路。MAX3095是带有±15 kV ESD保护的10 Mbps、5V、四路RS-422/RS-485接收器。对于带有连接至外部元件的编码器输入的容错系统,ESD保护是必需的。在本电路中,所有编码器输入线路上的ESD保护都在器件内部。没有外部ESD保护元件可大大减少电路所需的PCB面积。
150Ω电阻可以为从正交编码器沿着双绞线电缆传输的每对补偿信号对提供适当的终端匹配。电缆发生断裂或中断连接会产生开路故障,必须检测到该故障之后,活动控制器才能执行适当的操作。作为故障保护测量方法,当一对输入信号开路时,MAX3095接收器会输出逻辑高作为响应。用1kΩ的电阻对接收器的“A”输入进行偏压,使其超过“B”输入至少200mV。这些电阻对在存在输入终端电阻的情况下维持故障保护输出也是必需的。本电路提供ESD保护、开路检测和输出短路保护,但它不检测短路输入。




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机