


基于PLC的滑差调节器的控制
2008/5/9 13:12:00
摘要:本文阐述了滑差调节器的作用和工作原理,滑差调节器控制系统的硬件设备,滑差调节器的PLC控制。重点讲述了事故保护和调试过程中对实际问题的解决。该设备在核工业西南物理研究院的HL-2A磁约束等离子体实验装置的1#、2#电动机-飞轮-交流脉冲发电机组中得到应用,在机组起动过程中,使电动机定子电流的稳定度达到1%以下。整个设备运行稳定、可靠,完全满足设计和实际使用要求。
关键词:滑差调节器 PLC 程序设计
1 滑差调节器的作用和工作原理
HL-2A托卡马克是我国的一个大型核聚变研究实验装置。该实验装置的供电系统是由电动机-飞轮-交流脉冲发电机组经过变压器和晶闸管变流器对负载线圈供电。对于这样的供电系统,若采用直接由电网供电的方式会对电网造成巨大的冲击和产生严重的电磁污染。因此,我们采用了国际上普遍的做法,利用装置的脉冲工作制,采取自电网取能经电动交流脉冲飞轮发电机组进行隔离、能量存储与转换、功率放大和释能的供电方式。也就是采用两套90MVA 交流飞轮发电机组(以下简称发电机组或机组)对该实验装置脉冲供电。整个机组由2500kW绕线式异步电动机、90吨飞轮、90MVA发电机组成。其工作原理是通过6000V电网供电给电动机,当电动机转动时带动飞轮和发电机运转并达到电动机的额定转速1477r.p.m,之后自由加速。这时在励磁机的作用下,发电机将储存于飞轮的机械能转变为电能供HL-2A装置放电使用。
实验装置中,液体转差率调节器(即滑差调节器)主要起两方面的作用。一、实现两套机组的起动过程。当机组经过盘车到转速12 r.p.m时,接入6000V电网的真空开关合闸,滑差调节器投入工作。随后通过调节滑差调节器中活动电极的高度使具有280t-m2飞轮矩的机组恒电流(I=230A)加速到额定转速1477r.p.m,然后自由加速。二、实现机组的调速。当脉冲发电机要给实验装置脉冲供电时,整个装置的实验放电对2500kW的电动机而言是一个很大的脉冲负载,迫使机组的转速下降,机组释放出飞轮储存的机械能,帮助电动机克服尖峰负荷。为了保护电动机以及减少电动机脉冲工作时对电网的冲击,在装置的实验放电之前,必须在电动机转子回路串入一个适当的电阻,也就是将活动电极提高到合适的高度(如图1中KB所示)。当实验放电完成之后,通过调节活动电极的高度使机组电流(I=230A)恒定,再加速到额定转速1477r.p.m,然后自由加速。如此重复调速过程,直到实验结束。
2 滑差调节器控制的硬件设备
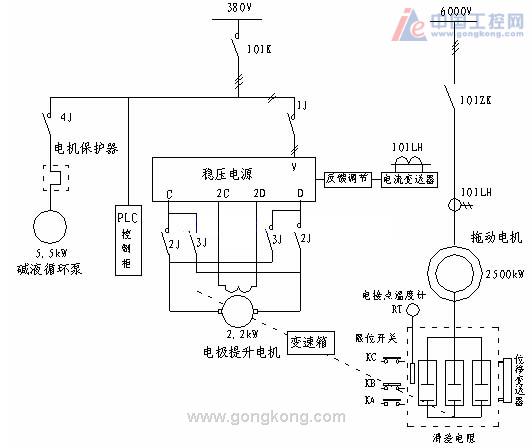
图1 滑差调节器控制系统的硬件设备
滑差调节器控制系统的硬件设备结构如图1所示,它主要由电流比为400/5A的LQJ-10型电流互感器(图中101HL)、电流变送器、PID反馈控制调节板、稳压电源、PLC组成。其中的PLC采用的是日本三菱公司生产的FX-80MR型可编程序控制器,该PLC具有40个输入点、40个输出点,其CPU、RAM、通信功能等集成于一体,可扩展ROM,通过手持编写器可方便地输入和更改程序,也可通过加密码来保证程序的安全。
电流变送器将电流传感器输出的二次电流变换为直流电压输出。PID反馈控制调节板将给定值和电流变送器的输出信号相比较,通过PID控制直流调速电源的输出,从而控制电极提升电机的转速使液体电阻的活动电极随定子电流的变化而变化。整个控制系统实现了在电极下降过程中,当定子电流大于或等于230A时,活动电极静止;当定子电流小于230A时,活动电极下降,并且随着定子电流的减小,活动电极的下降速度也变快。
3 滑差调节器的PLC控制
3.1 滑差调节器的PLC控制概述
滑差调节器的PLC控制按照技术要求完成了对整个滑差调节系统的稳定、可靠运转的控制。其中包括控制两套机组的分时起动、分时再加速;对电极提升高度进行检测;与外界通信;对碱液循环泵进行过负荷、电源缺相的保护;对电极提升电机进行过负荷、励磁电流的欠流保护;对碱液进行温度监控等。
滑差调节器的PLC控制,利用了PLC的输入/输出继电器、辅助继电器、定时器,采用了串联电路块的并联与多重输出电路等方法,完成了模块化的程序设计。每一模块独立完成一项具体任务。整个程序流程图如图2所示。程序的PLC梯形图如图3所示。
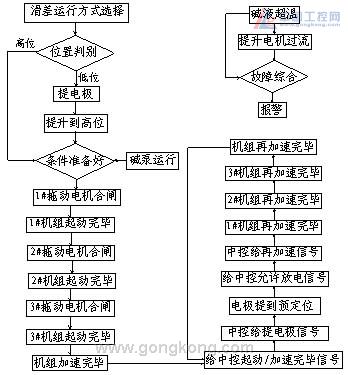
图2 滑差调节器控制系统的程序流程图
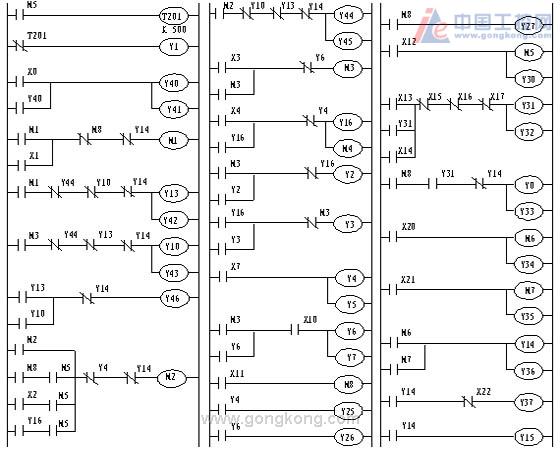
图3 滑差调节器程序梯形图
3.2 滑差调节器的PLC控制方式
该PLC控制系统为了满足调试和实验两方面的要求,设计了就地控制和远程控制两套方案。当调试时,采用就地控制方案。当进行聚变反应实验时,采用远程控制方案。
按照电机机组起动的技术要求,当1#机组起动或再加速完毕,2#机组才能进行起动或再加速过程。而对于1#、2#机组的提电极过程需要同时进行。该PLC控制系统的程序设计完全满足了上述技术要求。
该PLC控制系统还实现了滑差调节器部分的相对独立以及与装置其他部分的协调合作。当进行滑差调节器内部自检工作时,通过PLC程序断开滑差调节器部分与外界的通信,避免了与外部设备间的相互干扰。当进行聚变反应实验时,又通过PLC程序接通滑差调节器部分与外界的通信。此时,对于中心控制室的输入信号,通过PLC编程控制相应按钮及指示灯的互锁来确保提电极和再加速信号的准确、无误;对于输出信号,通过独立的继电器触点给出信号,避免了外部设备的干扰。以上所述都是通过PLC编程配上转换开关来切换和实现的。
3.3 滑差调节器的事故保护
当2500kW电动机的转子回路的电流过大时,循环碱液温度过高,以至冷却循环水无法带走转子回路释放的多余热量,此时通过温度传感器、PLC以及电铃,发出报警;当碱液温度达到70℃时,该控制系统的热继电器动作,整个机组停止起动。
当电极提升电机或碱液循环泵过热时,相应的热继电器动作,整个机组也将停止起动。
3.4 实际问题的解决
由于滑差调节器的控制在最初设计时,只考虑了当真空开关合闸,手动按动控制活动电极下降的按钮一次后,电极自动下降一种方案,当调试时,这一方案突然失灵。为了能够对付这种突发事件,以及更进一步地实现自动控制,该控制系统补充了两种方案与已有方案并存。第一种方案实现了当真空开关合闸,滑差调节器控制系统自动进入活动电极下降程序。第二种方案考虑了意外情况,对电机的下降完全采用手动下降操作。
真空开关合闸瞬间,机组的一次回路中的电流从0开始上升,这时如果使电流变送器动作,PID模块接收到的电流信号将从0开始上升,这样经过PID算法,测量值远小于给定值,使得滑差调节器的活动电极急速下降,这是一种严重的误动作。为了躲过一次回路中电流上升这一暂态过程,滑差调节器控制系统利用了PLC的定时器延时5秒使电流变送器动作。
4 总结
我们所设计的基于PLC的滑差调节器的控制系统经历了HL-2A装置运行实验的检验,实验记录表明在机组的整个起动和再加速过程中,绕线式异步电动机定子电流的稳定度达到1%以下,满足了实验的要求。根据实验数据所绘出的2500kW电动机定子电流与时间关系图如图5。从图中可见,发电机组在刚起动期间,起动电流以低于设定电流值(230A)
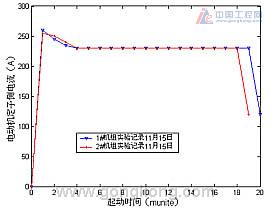
图5 发电机组电动机定子电流与时间关系图
开始上升并超过设定值,然后才缓慢降到设定值。对上述现象的解释如下:起动开始时绕线式异步电动机的绕组阻碍了起动电流的增大,因此机组起动的最初一段时间,起动电流经历了上升的暂态过程。为躲过这一暂态过程,前边所述的PLC定时器延时5秒所选时间太长,致使起动电流超过了设定值,然后才在PID反馈控制的作用下缓慢下降到设定值。因此,我们需要进一步的调试或计算来得到PLC定时器的准确延时值。
5 结束语
HL-2A装置的滑差调节控制系统是在经费不充裕的条件下完成的,因此,没有考虑它的计算机实时显示以及触摸屏方式。希望在条件合适的时候,我们设计的该控制系统能够在这两方面得到改进。
关键词:滑差调节器 PLC 程序设计
1 滑差调节器的作用和工作原理
HL-2A托卡马克是我国的一个大型核聚变研究实验装置。该实验装置的供电系统是由电动机-飞轮-交流脉冲发电机组经过变压器和晶闸管变流器对负载线圈供电。对于这样的供电系统,若采用直接由电网供电的方式会对电网造成巨大的冲击和产生严重的电磁污染。因此,我们采用了国际上普遍的做法,利用装置的脉冲工作制,采取自电网取能经电动交流脉冲飞轮发电机组进行隔离、能量存储与转换、功率放大和释能的供电方式。也就是采用两套90MVA 交流飞轮发电机组(以下简称发电机组或机组)对该实验装置脉冲供电。整个机组由2500kW绕线式异步电动机、90吨飞轮、90MVA发电机组成。其工作原理是通过6000V电网供电给电动机,当电动机转动时带动飞轮和发电机运转并达到电动机的额定转速1477r.p.m,之后自由加速。这时在励磁机的作用下,发电机将储存于飞轮的机械能转变为电能供HL-2A装置放电使用。
实验装置中,液体转差率调节器(即滑差调节器)主要起两方面的作用。一、实现两套机组的起动过程。当机组经过盘车到转速12 r.p.m时,接入6000V电网的真空开关合闸,滑差调节器投入工作。随后通过调节滑差调节器中活动电极的高度使具有280t-m2飞轮矩的机组恒电流(I=230A)加速到额定转速1477r.p.m,然后自由加速。二、实现机组的调速。当脉冲发电机要给实验装置脉冲供电时,整个装置的实验放电对2500kW的电动机而言是一个很大的脉冲负载,迫使机组的转速下降,机组释放出飞轮储存的机械能,帮助电动机克服尖峰负荷。为了保护电动机以及减少电动机脉冲工作时对电网的冲击,在装置的实验放电之前,必须在电动机转子回路串入一个适当的电阻,也就是将活动电极提高到合适的高度(如图1中KB所示)。当实验放电完成之后,通过调节活动电极的高度使机组电流(I=230A)恒定,再加速到额定转速1477r.p.m,然后自由加速。如此重复调速过程,直到实验结束。
2 滑差调节器控制的硬件设备
图1 滑差调节器控制系统的硬件设备
滑差调节器控制系统的硬件设备结构如图1所示,它主要由电流比为400/5A的LQJ-10型电流互感器(图中101HL)、电流变送器、PID反馈控制调节板、稳压电源、PLC组成。其中的PLC采用的是日本三菱公司生产的FX-80MR型可编程序控制器,该PLC具有40个输入点、40个输出点,其CPU、RAM、通信功能等集成于一体,可扩展ROM,通过手持编写器可方便地输入和更改程序,也可通过加密码来保证程序的安全。
电流变送器将电流传感器输出的二次电流变换为直流电压输出。PID反馈控制调节板将给定值和电流变送器的输出信号相比较,通过PID控制直流调速电源的输出,从而控制电极提升电机的转速使液体电阻的活动电极随定子电流的变化而变化。整个控制系统实现了在电极下降过程中,当定子电流大于或等于230A时,活动电极静止;当定子电流小于230A时,活动电极下降,并且随着定子电流的减小,活动电极的下降速度也变快。
3 滑差调节器的PLC控制
3.1 滑差调节器的PLC控制概述
滑差调节器的PLC控制按照技术要求完成了对整个滑差调节系统的稳定、可靠运转的控制。其中包括控制两套机组的分时起动、分时再加速;对电极提升高度进行检测;与外界通信;对碱液循环泵进行过负荷、电源缺相的保护;对电极提升电机进行过负荷、励磁电流的欠流保护;对碱液进行温度监控等。
滑差调节器的PLC控制,利用了PLC的输入/输出继电器、辅助继电器、定时器,采用了串联电路块的并联与多重输出电路等方法,完成了模块化的程序设计。每一模块独立完成一项具体任务。整个程序流程图如图2所示。程序的PLC梯形图如图3所示。
图2 滑差调节器控制系统的程序流程图
图3 滑差调节器程序梯形图
3.2 滑差调节器的PLC控制方式
该PLC控制系统为了满足调试和实验两方面的要求,设计了就地控制和远程控制两套方案。当调试时,采用就地控制方案。当进行聚变反应实验时,采用远程控制方案。
按照电机机组起动的技术要求,当1#机组起动或再加速完毕,2#机组才能进行起动或再加速过程。而对于1#、2#机组的提电极过程需要同时进行。该PLC控制系统的程序设计完全满足了上述技术要求。
该PLC控制系统还实现了滑差调节器部分的相对独立以及与装置其他部分的协调合作。当进行滑差调节器内部自检工作时,通过PLC程序断开滑差调节器部分与外界的通信,避免了与外部设备间的相互干扰。当进行聚变反应实验时,又通过PLC程序接通滑差调节器部分与外界的通信。此时,对于中心控制室的输入信号,通过PLC编程控制相应按钮及指示灯的互锁来确保提电极和再加速信号的准确、无误;对于输出信号,通过独立的继电器触点给出信号,避免了外部设备的干扰。以上所述都是通过PLC编程配上转换开关来切换和实现的。
3.3 滑差调节器的事故保护
当2500kW电动机的转子回路的电流过大时,循环碱液温度过高,以至冷却循环水无法带走转子回路释放的多余热量,此时通过温度传感器、PLC以及电铃,发出报警;当碱液温度达到70℃时,该控制系统的热继电器动作,整个机组停止起动。
当电极提升电机或碱液循环泵过热时,相应的热继电器动作,整个机组也将停止起动。
3.4 实际问题的解决
由于滑差调节器的控制在最初设计时,只考虑了当真空开关合闸,手动按动控制活动电极下降的按钮一次后,电极自动下降一种方案,当调试时,这一方案突然失灵。为了能够对付这种突发事件,以及更进一步地实现自动控制,该控制系统补充了两种方案与已有方案并存。第一种方案实现了当真空开关合闸,滑差调节器控制系统自动进入活动电极下降程序。第二种方案考虑了意外情况,对电机的下降完全采用手动下降操作。
真空开关合闸瞬间,机组的一次回路中的电流从0开始上升,这时如果使电流变送器动作,PID模块接收到的电流信号将从0开始上升,这样经过PID算法,测量值远小于给定值,使得滑差调节器的活动电极急速下降,这是一种严重的误动作。为了躲过一次回路中电流上升这一暂态过程,滑差调节器控制系统利用了PLC的定时器延时5秒使电流变送器动作。
4 总结
我们所设计的基于PLC的滑差调节器的控制系统经历了HL-2A装置运行实验的检验,实验记录表明在机组的整个起动和再加速过程中,绕线式异步电动机定子电流的稳定度达到1%以下,满足了实验的要求。根据实验数据所绘出的2500kW电动机定子电流与时间关系图如图5。从图中可见,发电机组在刚起动期间,起动电流以低于设定电流值(230A)
图5 发电机组电动机定子电流与时间关系图
开始上升并超过设定值,然后才缓慢降到设定值。对上述现象的解释如下:起动开始时绕线式异步电动机的绕组阻碍了起动电流的增大,因此机组起动的最初一段时间,起动电流经历了上升的暂态过程。为躲过这一暂态过程,前边所述的PLC定时器延时5秒所选时间太长,致使起动电流超过了设定值,然后才在PID反馈控制的作用下缓慢下降到设定值。因此,我们需要进一步的调试或计算来得到PLC定时器的准确延时值。
5 结束语
HL-2A装置的滑差调节控制系统是在经费不充裕的条件下完成的,因此,没有考虑它的计算机实时显示以及触摸屏方式。希望在条件合适的时候,我们设计的该控制系统能够在这两方面得到改进。




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机