


电动执行机构控制器中光电编码器脉冲波形问题的研究
1 概述
电动执行机构是工控领域中广泛用于控制阀门的开启和闭合的一种电动驱动装置,它通过电力驱动电机旋转并带动输出轴的旋转,通过控制信号来实现对特定阀门的行程控制。电动执行机构控制器的内部包含了位置感应装置、力矩感应装置、逻辑控制装置以及数字通信模块等控制核心。光电编码器作为位置感应装置,是一种集光、电一体,将旋转位移、速度等物理量转换成电信号的一种位置速度传感器。光电编码器由主轴带动旋转发出脉冲信号,根据对脉冲信号的判断可以对旋转的速度、位置做出分析和处理。
光电编码器作为一种位置计数装置应用于电动执行机构中有其独到的特点。首先,光电编码器采用相对编码计数,输出脉冲信号采用32位MCU芯片进行处理,最大可以储存232个脉冲数值,这使得电动执行机构可以应用于多回转、大行程的阀门装置中;其次,光电编码器中光栅盘采用低线数45线设计,根据电动执行机构的机械传动结构,使电动执行机构的行程控制精度保持在1°;另外,光电编码器适用于电动控制,在切除外在电力驱动的情况下手动旋转手轮,光电编码器仍能保持行程控制精度并同时具备断电阀位保持功能。
2 结构
光电编码器由45线光栅盘以及直射式红外光电传感器电路部分组成。将圆形光栅盘(见图1)安装在直射式红外光电传感器当中,其中光栅盘每圈设计成45个筋,45个孔,光栅盘由电机驱动旋转,旋转时筋孔交替切割红外传感器,产生两路类似正弦波的脉冲信号,经整形电路对该波形处理,最终输出两路方波信号。光电编码器安装如图2所示。

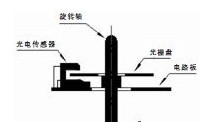
图1 光栅盘的结构 图2 光电编码器安装示意图
3 工作原理
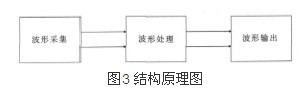
光电编码器实现脉冲方波的结构原理如图3所示。
波形采集电路如图4所示。N2为光电传感器ST257C,采用双光电晶体管,光束中心间距为0.7mm,输入端电阻R1、R2均为330Ω,传感器负载电阻R3、R4均为2kΩ。在光栅盘不断旋转过程中,光线间断地穿过晶体管,测量到输出端P1、P2的波形如图5所示。
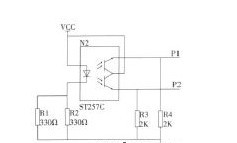
图4 波形采集电路
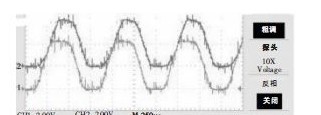 图 5 光电传感器输出端两路波形图
图 5 光电传感器输出端两路波形图
波形处理电路如图6所示。传感器输出波形后,在整形电路中,经过三极管电路进行反向输出,之后经过思密特双非门再一次反向输出。在P1'、P2'端输出脉冲方波。
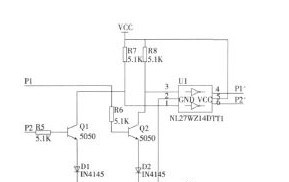
图6 波形处理电路
波形输出电路如图7所示。波形经思密特门反向输出后,再经过三极管电路反向输出,在P1''、P2''得出最终所需脉冲方波。
测量到输出端P1、P2的波形如图8所示
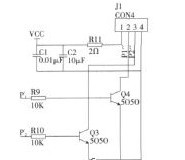
图7 波形输出电路

图8 最终输出脉冲波形图
4 实现过程
从以上原理分析可见,自传感器输出的波形因受到光电传感器通断速度的影响,波形并不为理想的脉冲方波,因此在波形处理电路中使用反向电路实现方波。
4.1 波形采集部分
根据ST257C光电特性,输入端电阻的测试条件为I=20mA,因为光电编码器需适应5VDC、3.3VDC两种电源供电方式(由电动执行机构决定),所以输入端使用两个330Ω电阻并联,5V/20mA=250Ω,3.3V/20mA=165Ω,165Ω=330Ω/2<250Ω。
传感器负载电阻给出参考值为10kΩ,通过大量实验,当负载电阻为10kΩ时,传感器输出波形下降沿过渡平缓,波形质量并不理想。在实验过程中不断更换负载电阻值,从1kΩ到10kΩ,实验结果表明:当负载电阻值变大时,传感器输出波形下降沿过渡时间变长。
经分析,光电三极管的开关性能与消耗在本身上的电流有关,当电源电压固定而负载电阻变大时,回路中总电流变小,则经过三极管的电流变小,三极管的开关速度变低,因此,当负载电阻逐渐变大时,三极管的开关时间逐渐变长。这也是上述波形在下降沿过渡时间变长的原因。
因为光电传感器属于离散性器件,传感器输出信号为模拟量信号,输出的信号效果与器件本身有很大关系,即同一器件在相同的测试环境下输出的信号会有很大差别,所以输出波形均有不同程度的误差。
通过大量的实验数据表明,当负载端电阻阻值选择在1~2.2kΩ时,传感器本身输出波形质量比较均衡,经过整形电路之后的方波波形,电压值为4.4V、4.5V,每一路方波的高电平宽度与低电平宽度比较均衡,两路方波中,相邻最近的两路脉冲沿变化时间间隔为50~100μs。该分辨率完全满足电动执行机构对于行程的计数与力矩的检测要求。
4.2 波形处理部分
传感器输出波形后,在整形电路中,经过三极管电路进行反向输出,然后经过思密特双非门再一次反向输出。
使用三极管电路作为思密特双非门的输入,是因为该双非门工作时有两个门槛电压,在5V供电电源下,高电平门槛电压约为3V,低电平门槛电压约为1.7V;在3.3V供电电源下,高电平门槛电压约为2.09V,低电平门槛电压约为1.1V。当三极管导通时,集电极输出低电平波形,电压约为1V,当三极管截止时,集电极输出高电平波形,电压约为5V,所以,在两种电源供电方式下,无论三极管导通或截止,从集电极输出的波形电压都能避免双非门的门槛电压,使双非门进入正常工作状态。双非门的工作原理如图9所示。
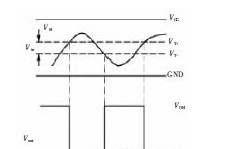
图9 双非门工作原理示意图
经过上述整形电路后,从双非门输出的波形是比较均匀的方波脉冲信号,该方波脉冲信号的电压值,高电平时约4.9V,低电平时约0.1V。
4.3 波形输出部分
从双非门输出的波形,再次经过三极管反向输出,得出最终需要的脉冲方波。
该方波脉冲信号输出,既要适应电动执行机构控制系统中行程的计数,也要适应力矩的检测,即速度的反馈。在2SA8电动执行机构控制系统中,行程端计数的承受电压约为5V,而与变频器相连接的力矩端检测端口的电压值为24V。如果直接将双非门的输出波形连接至变频器,则24V的电压必然会将该双非门烧坏。所以,在双非门的输出端连接三极管电路,实现电平转换功能,以适应5V和24V两种电压等级。
5 应用总结
光电编码器应用于电动执行机构,是一种技术上的更新与突破。以往在电动执行机构控制系统中,大部分使用行程开关与力矩开关来控制执行机构的行程和输出力矩,控制精度依赖于机械开关的技术,实际调试也很繁琐,需通过组合齿轮逐步调试,并且需要开盖操作。
使用光电编码器作为电动执行机构的行程和力矩控制元件,在提高控制精度的同时,有效简化了电动执行机构的调试过程,提高调试效率,工作人员无需开盖操作,只需按照电动执行机构运行菜单提示,即可完成全部的行程与力矩调试工作,轻松而可靠。




 投诉建议
投诉建议
提交

络筒机工艺设计与质量控制
隆昌电子灌装机控制器引领市场潮流
点胶机控制器的驱动设计方案
隆昌电子成功研发贴标机控制器
隆昌电子携灌装机控制器、封口机控制器、贴标机控制器等产品赴广州展