


模拟电路控制的循线机器人制作教程
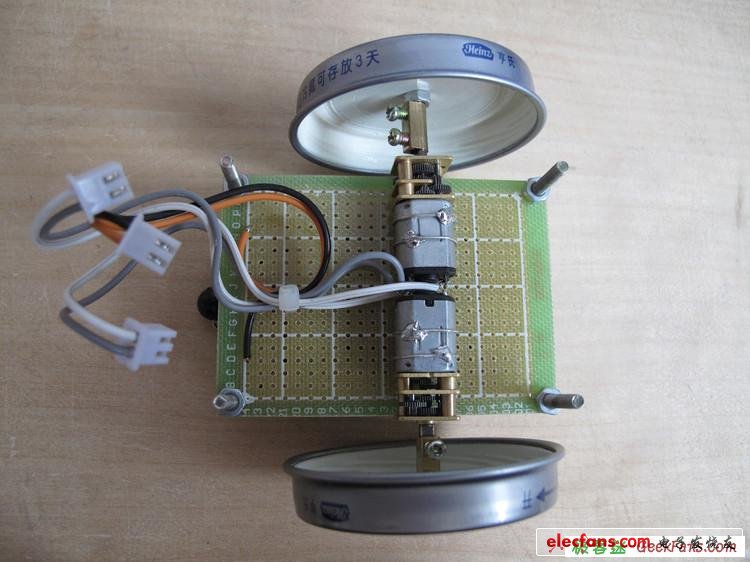 尾轮靠后用螺丝固定在电路板下方。电池仓直接用双面胶贴在洞洞板下面。如下图E。
尾轮靠后用螺丝固定在电路板下方。电池仓直接用双面胶贴在洞洞板下面。如下图E。  我是用的是5X7厘米的预制洞洞板,四角有安装孔,借助铜螺丝可以很方便的一片片叠加起来。把电机和电源都单独引出接头,方便将来和上面控制板的连接。如下图F。
我是用的是5X7厘米的预制洞洞板,四角有安装孔,借助铜螺丝可以很方便的一片片叠加起来。把电机和电源都单独引出接头,方便将来和上面控制板的连接。如下图F。 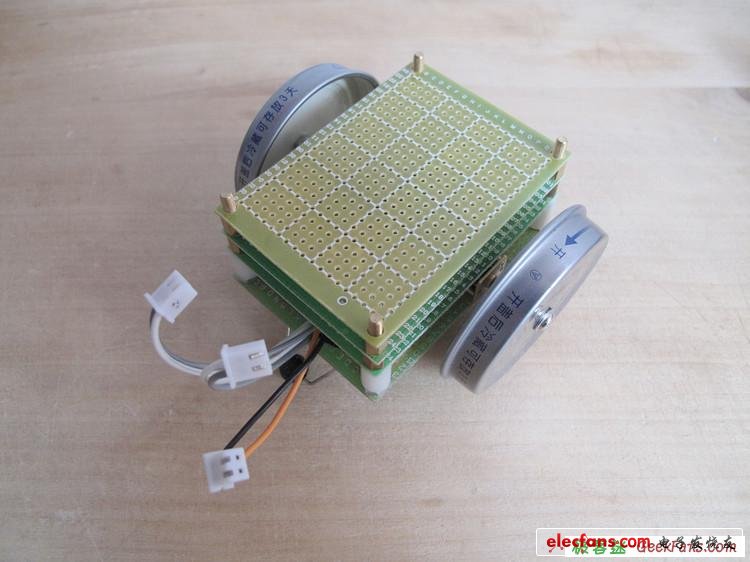 这样,一个基础小车的底盘就做好了。5X7厘米的洞洞板上有足够数量的焊盘,将来还可以用它做单片机小车,换不同的控制板,实现不同的用途。很方便吧?
这样,一个基础小车的底盘就做好了。5X7厘米的洞洞板上有足够数量的焊盘,将来还可以用它做单片机小车,换不同的控制板,实现不同的用途。很方便吧?二,制作循线控制板 这台循线小车是由模拟计算机控制的。模拟计算机是用电流、电压等连续变化的物理量直接进行运算的计算机,由运算放大器构成核心器件,运算过程不存在模数-数模转换和编程算法的问题。 线路图:
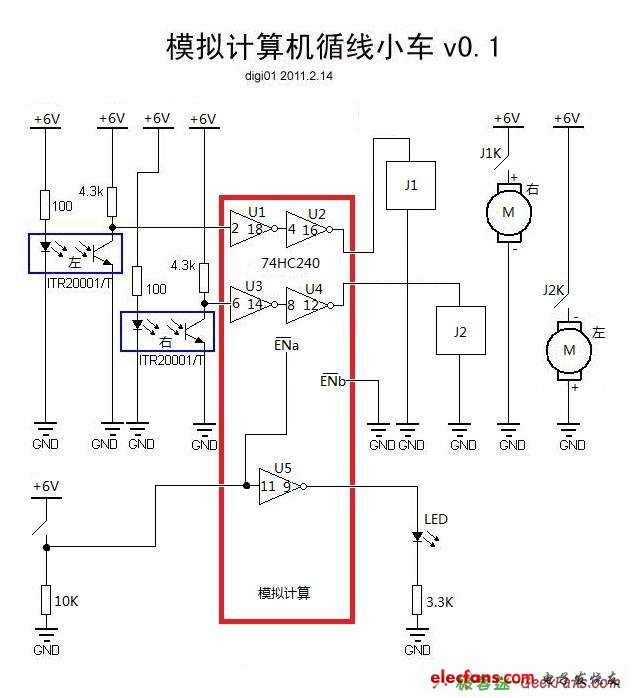 芯片接线图:
芯片接线图: 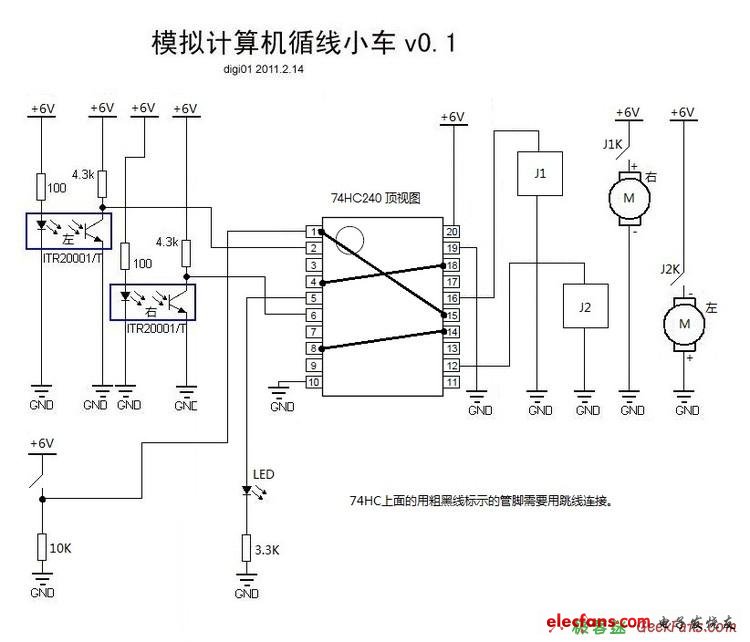
元件清单:
型号 数量
ITR20001-T红外线光电开关 2
74HC240配插座 1
5V小型继电器 2
4.3K电阻 2
10K电阻 1
100欧姆电阻 2
网线芯 若干
洞洞板 若干
LED 1
细导线 若干
小车每侧的车轮由两只反相器组成的比例器控制,通过继电器带动减速电机运转。这里使用的是一片八路反相驱动芯片74HC240作为模拟计算机的核心。读者也可以使用通用运算放大器接成反相器来替代,控制效果是一样的。
以下是小车运行状态的分析:
1, 当比例器输入端的红外线光电开关检测到黑线的时候,红外线接收管接收到的反射光减小,接收管呈高阻状态,比例器输入和输出都是高电平,驱动继电器吸合,与之相应的减速电机带动车轮转动。
2, 当左右两只光电开关都检测到黑线,两只继电器同时吸合,小车全速直行。当黑线终止的时候,两个光电开关发射管发出的光线经地面反射至接收管,接收管接收到的入射光增加,比例器输入电平降低,输出电平跟着降低,两只继电器释放,小车停驶。
3, 由此不难分析出小车拐弯时的状态:以小车为第一视角,行驶中遇到顺时针弯道,左侧光电开关首先脱离黑线,继电器J1释放,右轮停转;左轮带动小车做顺时针转动,直至左侧光电开关回复到黑线上方。
4, 逆时针弯道的转向状态与上面相反。
5, 避障控制是利用74HC240的使能端来实现的。当小车前方没有障碍物的时候,74HC240的1脚,11脚因为10K下拉电阻的作用,保持在低电平,对应的四只反相器U1,U2,U3,U4为使能状态。9脚为高电平,LED灯亮,小车按设计运转。当遇到障碍物的时候,1脚和11脚为高电平,四组反相器为关断状态,LED灯灭,小车静默。避障开关的优先级高于光电开关,无论小车在那种运行状态,只要避障开关动作,都会强制小车进入静默状态。
总结起来如下表所示:
状态 避障开关 右光电开关 左光电开关 继电器J1 继电器J2 右轮 左轮 小车
1 断 黑 黑 吸和 吸和 转 转 前进
2 断 黑线 白 释放 吸和 停 转 顺时针
3 断 白 黑线 吸和 释放 转 停 逆时针
4 断 白 白 释放 释放 停 停 停
5 通 任意 任意 释放 释放 停 停 停
下图是光电开关的安装示意。两只红外线光电开关焊接在一片裁剪成条形的洞洞板上,要求模块间距略小于路面黑线的宽度。也就是当小车直线行驶的时候,两只模块同时位于黑线上方。




 投诉建议
投诉建议
提交

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机