


模拟电路控制的循线机器人制作教程(二)
用两根曲别针弯一对L型的支架,把传感器板固定在小车前部。铁质曲别针很好定型,使得微调光电开关与路面间距变得很简单。线路图里面的电阻数值是配合ITR20001-T型红外线光电开关,经过实际试验决定的。当传感器距离路面5MM的情况下,可以准确动作。如果爱好者使用其他型号的光电开关,电阻数值需要做适当调整。

下图所示为避障开关的做法。简单到只需要一根电阻腿,一段网线。
用电阻腿弯一个圆圈焊在洞洞板上,做为开关的定片;网线剥皮穿过圆圈焊在洞洞板上,与圆圈保持微小的间距,做为开关的动片。在网线碰到物体的时候,定片和动片接触,触发电路动作。
因为74HC系列的芯片为CMOS器件,输入阻抗很高,这里可以忽略开关的接触电阻,即使有几百欧姆的接触电阻也不会影响电路的正常动作,实际上这个简陋的土制开关动作非常灵敏。 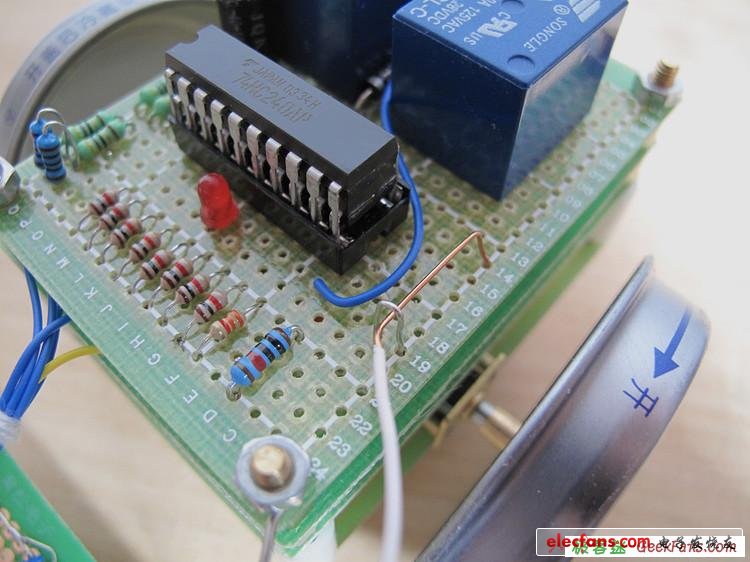
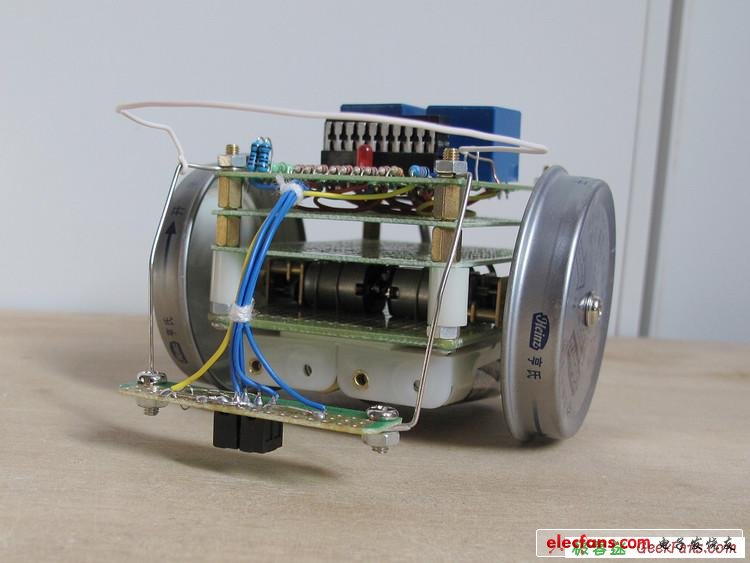
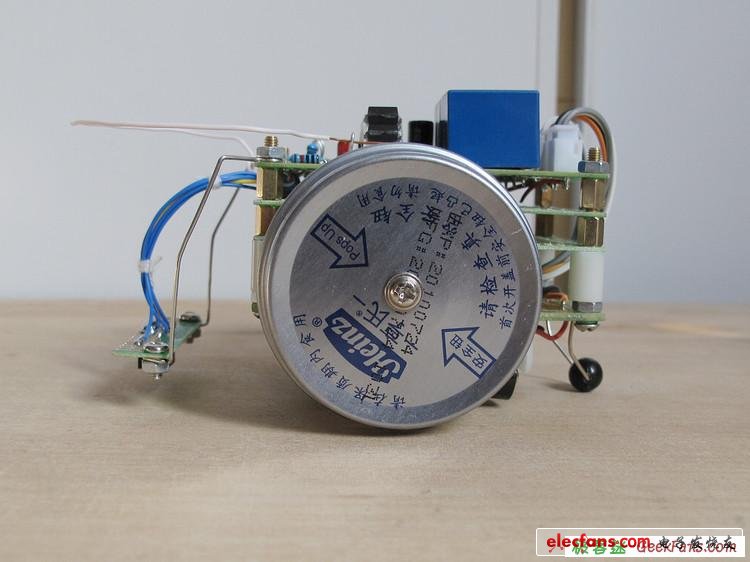
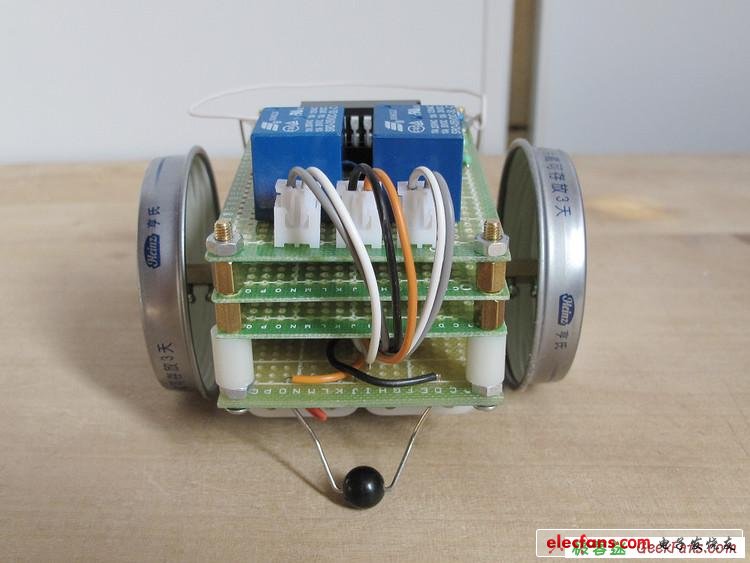
下面几张图是制成的小车。
后话:
从自动控制系统的角度来分析,本文所制作的循线小车(包括其他文章介绍的单片机循线小车)是一个随动系统,随动系统的输入信号是一个随时间变化的函数,系统的任务是在存在扰动的情况下,保证输出量以一定的精度跟随输入信号的变化。
随动系统在工业、交通和国防等部门都有着广泛的应用,比如机床的自动控制,车辆的智能转向,火炮的控制和卫星导航等。机器人爱好者制作的循线小车可以说是一台小中见大的模型,分析和改善它的不足,对深入了解大型的系统亦会有很大帮助。
比如,这台循线小车使用继电器来控制电机转动,电磁式继电器具有吸合电压高于释放电压的特性,相当于在控制系统中加入了积分环节。微型电机的减速箱,存在齿轮传动间隙。这些因素都会增大系统的稳态误差,直观的结果是小车遇到弧度比较小的黑线轨道时转弯效果不好,会出现车体来不及响应运算指令,传感器同时脱离黑线的情况。而在从弧线进入直线的时候,因为齿轮间隙造成光电开关的位移误差,使左右两边的继电器频繁动作。
以下有几个改进的办法供大家探讨:
1,使用快速响应的电机驱动电路,比如在单片机小车里面经常采用的L293D,L298N等电机驱动芯片。
2,增加光电开关的数量,这个方法在单片机循线小车里也广泛采用,原理是相通的。
3,在光电开关与比例器之间加入由阻容器件构成的串联超前校正网络和相应的补偿放大器。比例加微分控制(PD)就是一种超前校正,可以提高小车运行的稳定性和快速性。
还可以对光电开关和避障开关进行改进。如使用经过调制的信号来驱动光电开关的红外线发射管,接收管输出信号经过滤波器再进入模拟计算机,以避免外界杂散光线的干扰。避障开关也可以使用红外线或者超声波模块改成非接触式的。
下图是改进版的线路图,扩展了光电模块,使用了L293D驱动芯片。注意这个线路还没有经过测试,仅供参考。 




 投诉建议
投诉建议
提交

助力企业恢复“战斗状态”:MyMRO我的万物集·固安捷升级开工场景方案

车规MOSFET技术确保功率开关管的可靠性和强电流处理能力

未来十年, 化工企业应如何提高资源效率及减少运营中的碳足迹?

2023年制造业“开门红”,抢滩大湾区市场锁定DMP工博会

2023钢铁展洽会4月全新起航 将在日照触发更多商机